
高速公路扩容项目激光雷达测量技术应用
2021-04-13 04:39高桃峰
中国新技术新产品 2021年2期
高桃峰
(四川省交通勘察设计研究院有限公司,四川 成都 610000)
1 项目概况及激光雷达测量的主要任务
南充至成都高速公路扩容工程项目(勘察设计第A3标段初步勘察设计项目K67+000~K144+800)主体工程的建设里程约77.8 km,项目位于四川省德阳市和遂宁市,途径德阳市冯店镇等若干镇。
该激光雷达测量工作的主要任务分为:机载激光雷达航测按1∶500的精度控制、车载扫描总体精度按照1∶100的比例尺控制以及提供已经分类的LAS格式彩色激光点云。
2 机载激光雷达测量作业流程
2.1 航线规划及踏勘
根据项目需求,首先对作业区进行整体了解,包括作业区内的作业环境(GPS 信号遮挡情况,纠正点布设和施测方便程度,人员、设备、数据安全状况,交通限制等);再制定机载激光雷达测量系统作业的扫描路线、控制点和纠正点的布设方案,为该项目的航线规划踏勘做准备。
2.2 外业数据采集
为了充分保证航测成果的质量,该数据采集使用的是中测瑞格扫描鹰HS-1600激光雷达系统,严格控制航摄飞行天气条件、设备的参数设置、原始数据的存储和运输、原始GPS/IMU数据、激光扫描数据、数码影像数据、地面观测数据、飞行记录及地面基准站参数、数据预处理成果质量以及数据后处理成果质量等技术环节;通过现场踏勘及附近控制点的位置情况确定起飞场地,最终完成项目数据的采集。
2.3 轨迹解算
通过地面基准站的GPS数据以及对机载GPS数据的差分解算,精确确定航摄过程中飞机的航迹,再与IMU数据进行耦合处理,得到飞机的姿态信息,并进行平滑处理;通过对飞行过程的姿态和位置精度的分析评估惯导作业状态,对数据精度进行初步判断。
2.4 DEM数据和DOM数据的制作
根据采集的基站GPS数据及航飞原始数据差分预处理解算点云数据,利用TerraSolid系列软件处理激光点云数据和影像pos数据,进行DEM数据和DOM数据的制作;制作过程严格按照标准和规范的要求执行。
2.5 成果整理及提交
加强项目组织管理及协调工作,进行地物和等高线的编辑以及图幅整饰;并经实地调绘修改,完善地形图。
3 车载激光雷达测量流程
3.1 踏勘
该项目主要使用 HS-1600车载激光扫描系统对测区内已有的高速公路、互通匝道以及上跨道路进行数据采集和处理,经过踏勘、纠正点布设和施测以及点云和照片数据的采集与处理,生产出项目需要的各项成果。
根据项目需求,先对作业区进行整体了解,包括作业区内作业环境(GPS 信号遮挡情况,纠正点布设和施测方便程度,人员、设备、数据安全状况,交通限制等)[3];制定移动测量系统的作业扫描行车路线、控制点以及纠正点布设方案。
3.2 基准站控制点选点
由于该项目采用 CGCS2000 高斯投影坐标系统和 1985国家高程基准,而HS-1600车载激光扫描系统采集的原始数据为 WGS-84坐标系,因此需要将采集的点云数据进行坐标系转换(七参数法)[2]。HS-1600车载激光扫描系统后处理软件提供了坐标系转换参数的解算功能[4]。使用作业区内经过检核有效的高等级控制点进行七参数计算,七参数解算时使用与机载同一套转换点转换参数。地面站布设与机载地面站一致。
3.3 标靶纠正点布设与施测
一般情况下,靶标控制网布设单侧间隔300 m,双向交叉间隔150 m,互通匝道处应该分别布设在首尾段。同时,在GNSS信号受影响区域适当加密(例如在进出收费站口前后都应该增加靶标点);在测线首尾处的两侧车道布设靶标点[5]。
考虑作业的安全性,该项目在高速公路中央隔离带边缘靶标纠正点布设困难,布设时采用单边应急车道或路肩位置布设的方法,布设靶标高程纠正点的间距不低于150 m,布设平面纠正点的间距不低于300 m。由于在高速路匝道施工存在困难,因此,互通匝道首尾布设。靶标布设为十字形(如图1所示),十字单条尺寸为 10 cm×60 cm,采取人工涂/刷白色油漆的方式确保点的稳定,测量脚点在十字形的中心点,便于内业数据的处理识别,需要对靶标纠正点进行编号并在现场标记,存取奥维位置,靶标纠正点的平面坐标施测采用GPS-RTK的方式,简易三脚架对中杆架设平滑60 m得到,高程采用电子水准仪四等水准进行施测。
3.4 车载激光扫描系统外业数据采集
3.4.1 数据采集准备
地面站开机后,车载雷达系统开机做惯导初始化校准。
3.4.2 扫描作业
由于实际采集路况复杂多变,因此,在行车扫描路径设计完成后,需要到实地沿设计路径模拟采集,要特别注意一些特殊路段(例如岔路口、单向路以及与设计中不一致的路段)并及时做好记录。模拟采集完成后,根据实际情况对设计的行车路径进行针对性地调整,以实现最优化的结果。正式扫描时,驾驶员只需要注意车速,不需要时刻注意路线,完全按照导航轨迹指示行车,进而提高了作业效率。
在外业数据采集时,应该将确认修改后形成的数据采集路线规划结果导入导航器中,作业时严格按照预设路线完成数据采集,避免重复和遗漏,提高作业效率。有突发情况(例如封路、新增限高和限行等)时,需要根据实际情况就近结束作业或者临时改变采集路线;内业处理时再调整、更新导航数据文件。
在实际作业时,扫描车应该开启双闪模式,尽可能地减少其他车辆或者移动物体的遮挡,避免出现数据盲区。除了初始化和结束化以外,规范的扫描作业对结果也有显著的影响,因此在实际扫描作业时应该注意以下6点:1) 根据路面情况(是否存在中央隔离带、道路宽度等)决定采取单向扫描或者双向扫描,扫描作业时车行速度控制在80 km/h左右。2)在扫描作业时,作业车不得随意变动车道,尽可能地减少变道次数。3) 扫描时,减少与同向车辆并排行驶的时间,避免出现遮挡。4) 扫描作业时离基站最远不能超过15 km。5) 单次扫描作业时间不能超过3 h。6) 遵守其他高精度作业的规范和要求。
3.4.3 扫描数据整理
移动测量系统采集的原始数据量较大,主要包括点云数据、基站和流动站数据以及IMU数据等。每天完成扫描作业后应该及时将数据拷贝至电脑中并进行备份,根据情况每天清理系统中各个设备的存储空间,以确保第二天的正常作业。
3.5 内业数据处理
完成外业采集数据整理后,应该及时进行数据解算和精度评定,确保采集数据的有效性,对不合格的数据应该及时补充采集。将已经采集完成且有效的轨迹导出到基础底图(例如DOM )中,便于查漏补缺和修改外业数据采集计划。
3.5.1 轨迹解算
在进行组合导航数据解算前应该开展格式转换、数据预处理等准备工作。数据准备就绪后,使用导航解算软件PosPac MM8.1进行解算。解算完成后,应该使用软件自带的精度评估功能对解算结果进行初步判断,当最大偏差超过限差时,应该调整关键参数进行尝试解算;多次尝试后误差仍然较大时,应该对其原因进行分析并采取进一步的措施,例如换用IE软件进行组合导航解算,当2款软件解算精度均较差时,应该重新采集数据。当结果符合预期精度时,就可以导出组合导航解算结果,以备后续解算点云数据时使用。
3.5.2 点云处理
轨迹解算完成后,生成WGS84坐标系统的点云初始数据,然后使用七参数转换将点云坐标系统转换至目标坐标系。
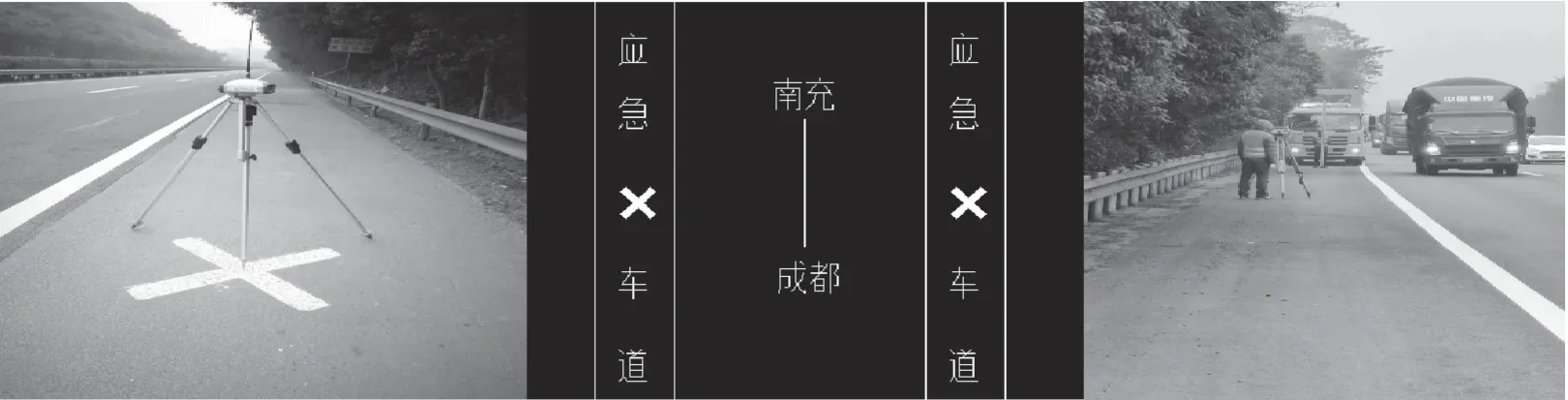
图1 靶标样式及测量方式
3.5.3 靶标纠正
使用靶标成果检查点云成果高程平面精度,如果精度超限则需要进行靶标纠正。靶标纠正采用TerraSolid点云后处理软件,平面使用四参数分段纠正,高程使用拟合纠正。
4 航测精度检查
4.1 检测方式
“成南高速公路扩改建项目”数据精度评估采用RTK作业方式,为了保持检测点坐标与激光点云坐标系统一致,以解算激光点云数据的基站为基准进行检测点的数据采集。
采集的数据分为高程检查点和平面检查点,用这2类点分别对该项目的高程和平面进行精度评估。
检查点采集工作,拟以测区中线为基准,均匀分布,采取多地形,多地物,以全面客观的评价项目数据精度情况,在实际作业情况中,根据测区的特点,交通状况,采集检查点如下。
4.2 高程精度检测
该项目外业共采集938个高程检查点,除去斜坡及明显粗差点(RTK信号为浮点时获取值),可用938个地面高程点。高程点检查使用点云处理模块TerraSolid自动检测938个高程点数据生成激光点云、空三解算DSM高程精度报告,采集点与激光点云、空三解算DSM对比。
根据点云高程检查结果,将高差的绝对值分为0 cm~5 cm(含5 cm)、5 cm~10 cm(含10 cm)以及>10 cm 3档,经统计得到结果,如图2所示。
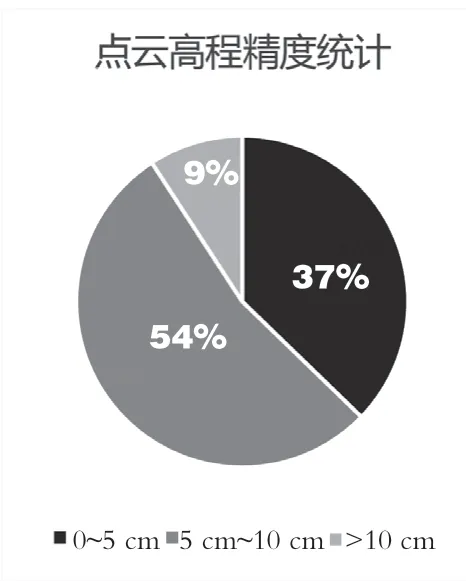
图2 点云高程精度统计
根据DSM高程检查结果,高差的绝对值分为0 cm~10 cm(含10 cm)、10 cm~20 cm(含20 cm)以及20 cm~25 cm 3档,经统计得到结果,如图3所示。
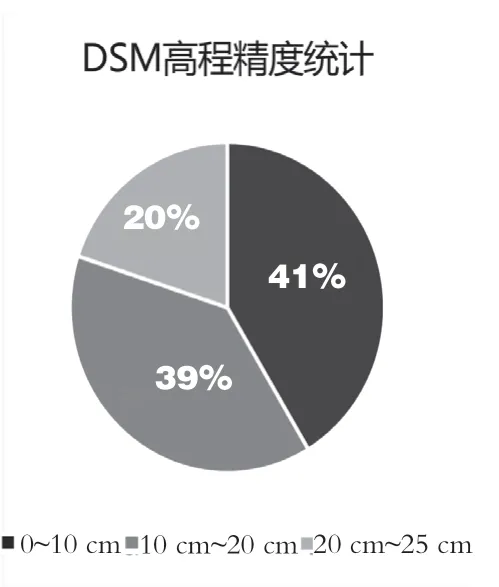
图3 DSM高程精度统计
4.3 平面精度检查
在实地检测时,选择不同地形和不同高程的点实测,从而分析地形状态对成果精度的影响。检测对象包括围墙转角、四角方形建筑以及硬质地面明显转角处等容易在影像上分辨的地物,该测区共计外业实测1251个检查点。
平面检查主要通过实测地物与影像及点云的地物进行对比,通过肉眼辨别地物会存在的偏差,因此对比结果也会存在一定的误差。该实测使用ARCGIS软件及terrsolid软件将实测地物坐标点与点云及影像上地物进行对比。
根据点云平面检查结果,将精度分为0 cm~10 cm(含10 cm)、10 cm~20 cm(含20 cm)以及20 cm~30 cm 3档,经统计得到结果,如图4所示。
根据影像平面检查结果,将精度分为0 cm~10 cm(含10 cm)、10 cm~20 cm(含20 cm)以及20 cm~30 cm 3档,经统计得到结果,如图5所示。
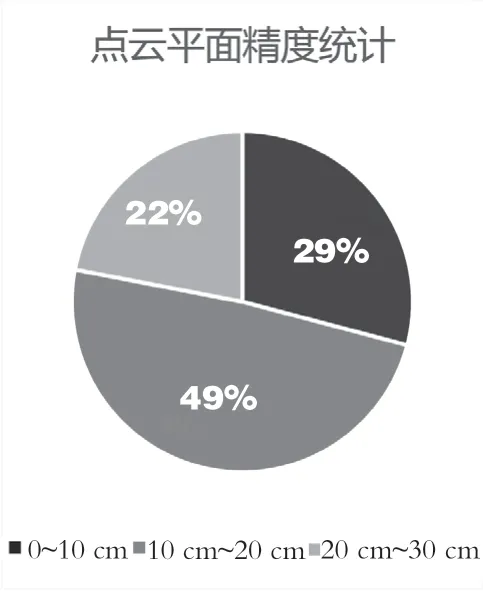
图4 点云平面精度统计图
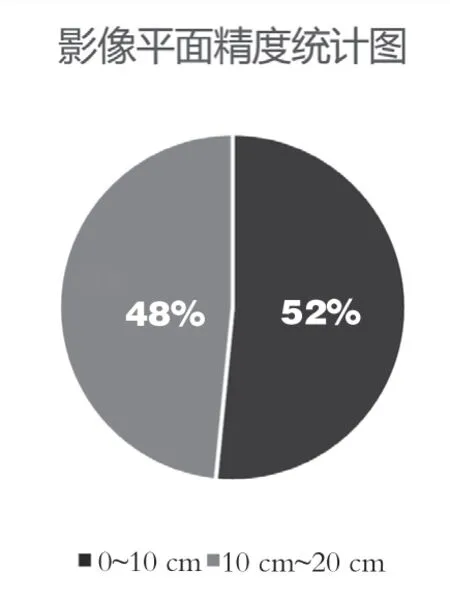
图5 影像平面精度统计
4.4 精度评价
该测区激光雷达航测工作,数据成果各项精度指标满足《合同》及规范的要求,各种数据齐全正确,资料整理完整,符合相关国家规范,成果质量合格。
5 结语
激光雷达测量技术是当代科技发展的必然产物,是数字化、信息化、互联网相互结合、彼此作用的高性能集成系统,在高速公路扩容项目中此项技术优点很多,应用广泛,随着专业人员的深入研究,激光雷达测绘技术逐渐成熟,也会被应用到更多的领域,而在工程测绘中的应用给测绘的效率和质量带来了质的飞跃,也在一定程度上促进了我国工程测绘工作的快速发展。
猜你喜欢
北京测绘(2022年5期)2022-11-22
计算机系统应用(2022年4期)2022-05-10
汽车观察(2021年8期)2021-09-01
天津医科大学学报(2021年4期)2021-08-21
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
中国交通信息化(2019年1期)2019-03-26
国际呼吸杂志(2019年4期)2019-03-12
电子制作(2018年16期)2018-09-26
光学精密工程(2016年4期)2016-11-07
