
基于LitghtTools的激光四象限探测系统仿真
2021-04-11 09:35李福巍张运强王鹏辉潘国庆
应用光学 2021年1期
李福巍,张运强,2,王鹏辉,2,潘国庆,2
(1.中国空空导弹研究院,河南 洛阳 471099;2.航空制导武器航空科技重点实验室,河南 洛阳 471099)
引言
激光四象限探测系统是激光半主动导引头的核心器件,可应用于多种激光制导武器系统中。激光半主动导引头的工作原理是位于弹体之外的激光目标指示器照射目标,弹上的激光制导导引头跟踪目标反射的激光信号,并根据此信号解算出目标信息,再由弹上计算机综合弹体姿态信号并按照给定的制导形式处理成制导信号,输出给执行机构,使武器跟踪目标。其优点是制导精度高,抗干扰能力强,结构简单,武器系统成本低。如美国的铜斑蛇和俄罗斯的红土地激光制导炮弹均采用半主动激光导引头,性能优异。美国的海尔法激光制导导弹也采用半主动激光导引头[1]。
本文利用LightTools 软件仿真了激光半主动导引头中的四象限探测系统,对系统的性能进行有效地评估,为设计提供依据。同时,针对激光散斑现象进行了分析,为系统设计和优化提供了理论依据。
另外,本文还利用LightTools 软件对系统的杂散光情况进行了分析,进一步提升了系统的性能。目前,国际上最常用的光学设计分析软件有Code V,LightTools,Tracepro,Zemax 等,其中LightTools 在光机系统一体化仿真,杂散光分析等方面具有明显的优势[2-5]。
1 LightTools仿真模型建立
1.1 四象限探测器建模
四象限探测器是探测系统的主要部件,四象限探测器是把4个性能相同的探测器按照直角坐标系的要求排列成4个象限并集成在同一芯片上,中间由十字形分划线隔开,如图1所示。图1中φ为探测器光敏元的直径,d为分划线宽度,A、B、C、D代表4个光敏面,即4个象限。四象限探测器具有响应频率快,响应波长宽,灵敏度高,工作温度范围大等优点[6-7]。
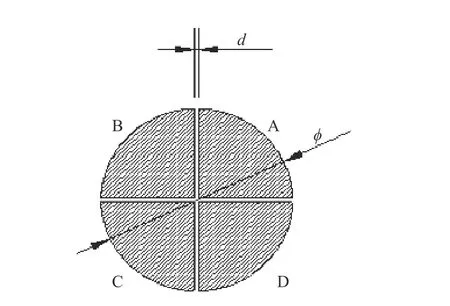
图1 四象限探测器示意图Fig.1 Schematic of four-quadrant detector
本文仿真的四象限探测器参数如表1所示。

表1 四象限探测器参数Table1 Parameters of four-quadrant detector
1.2 光学系统建模
光学系统设计时主要采用CodeV 光学设计软件,该软件与LightTools 软件有很好的交互性,可以直接将设计好的系统进行转化。镜筒等机械结构采用UG 等软件进行建模,然后再导入LightTools中并进行简单的修改,建立的模型如图2所示。
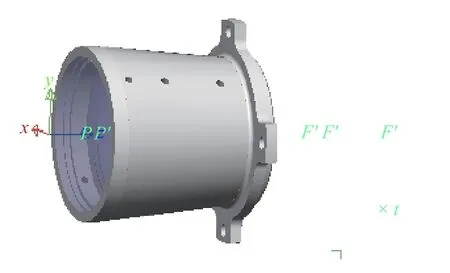
图2 光学系统模型Fig.2 Model of optical system
1.3 探测器系统整体建模
将光学系统和四象限探测器按照设计要求布置在指定位置,然后在光学系统前面设置光源,模拟目标光线的入射,建立探测系统的整体模型,如图3所示。

图3 探测系统模型Fig.3 Model of detection system
2 系统仿真
2.1 和差比幅指令仿真
对于激光四象限探测系统,工作时光学系统接收并汇聚目标漫反射的激光光束,在探测器上形成圆形光斑,光斑使每个象限都输出一个信号,通过对各个象限输出信号的处理可以得到目标位置的信号。
定义4个象限输出的信号为VA、VB、VC、VD,进行和差比幅运算,可以得到沿Y、Z方向的偏移量所对应的值UY、UZ,再乘以系数K可计算出位置信息:

通过上面所建立的探测器模型,在仿真过程中将得到光斑在4个象限的分布,并可以记录4个象限的能量,然后带入(1)式和(2)式,计算得到系统的和差比幅指令输出情况,如图4所示。图4(a)为通过系统仿真得到的成像光斑;图4(b)为光斑落在四象限探测器上的情况。

图4 光斑在探测器上的分布Fig.4 Distribution of light spot on detector
通过在仿真模型中探测器的每个象限上增加能量接收器,可以采集落在各个象限的能量,图5是其中一个象限上所接受到的能量值。
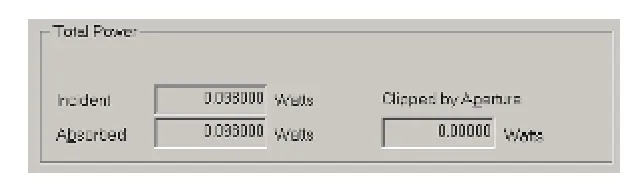
图5 一个象限上的能量值Fig.5 Energy value in one of quadrant
通过以上分析可以评估系统的指令输出情况,对系统的整体评估提供依据。
2.2 杂散光分析
杂散光是光学系统中非正常光路中的光线通过若干次反射或散射落在探测器上并引起响应的现象。LightTools 软件提供了杂散光分析功能,通过对不同光学面和机械面的设置,可以较为真实地模拟光线在系统中的传输,从而进一步分析系统的杂散光分布情况[8-12]。光学系统中的光线追迹如图6所示。图6(a)为拟进行杂散光分析的光学系统,光学系统视场为±15°,线性区为6°,采用三片式透射结构;图6(b)为30°光线入射光学系统的传输情况。由图6可以看出,虽然光线在系统中进行了多次反射和折射,但是并未有光线落在探测器上,该角度并不会产生杂散光。

图6 光学系统中的光线追迹Fig.6 Ray tracing in optical system
在设计过程中,将设置不同的角度对系统进行全面的仿真评估。当某个角度存在杂散光时,将有光线落在探测器上。对图6中光学系统进行仿真,当入射光线为16°时,有若干光线落在探测器上,如图7所示。当以0°光线入射时在探测器上形成的能量为0.5 W,该部分杂散光在探测器上形成的能量为3.2×10−7W。

图7 落在探测器上的光线Fig.7 Ray falling on detector
2.3 散斑特性仿真
激光具有非常好的相干性,容易产生干涉现象,当激光照射物体的漫射表面,或者通过一个透明的漫射体时会在其表面以及附近空间产生无规则分布的亮暗斑纹,即激光散斑[13-16]。这是一种干涉现象,而且散斑在各种激光系统中客观存在。因此,本文利用LightTools 软件分析了散斑效应对指令输出的影响。
根据散斑的特点,本文利用LightTools 软件在一个均匀的光斑上叠加一些随机的变化来模拟散斑效应,如图8所示。图8(a)为软件模拟的均匀光斑,图8(b)和8(c)是增加了散斑效应的光斑。
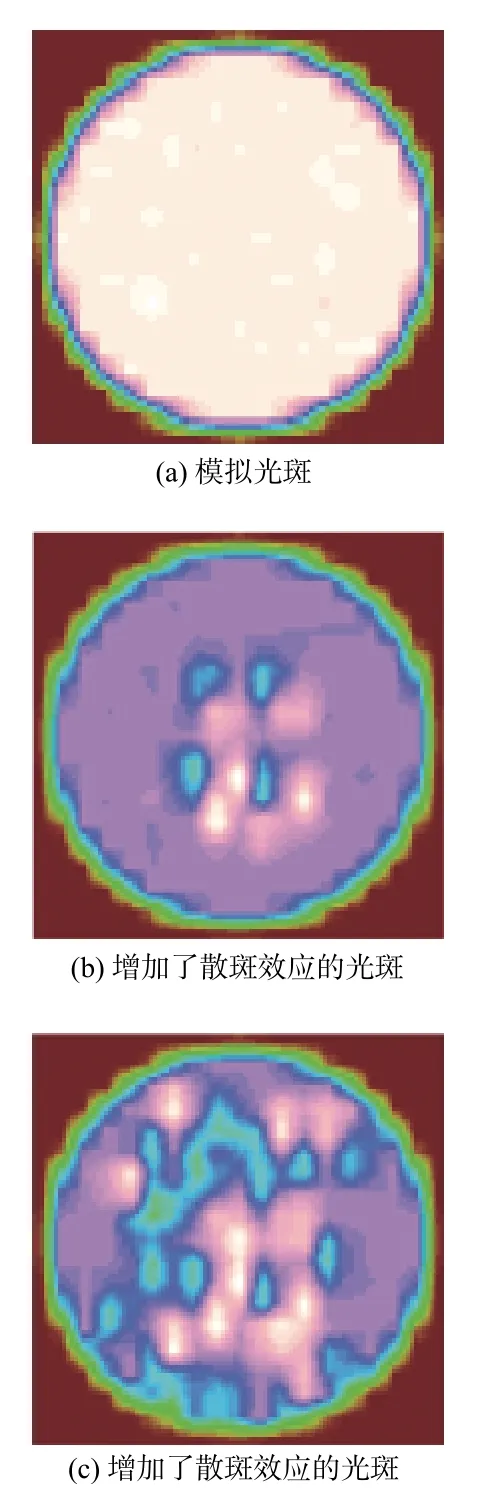
图8 激光散斑效应仿真Fig.8 Simulation of laser speckle effect
假设在不同帧时散斑分布是不同的,随机模拟10帧不同散斑图像,加载在0°视场的情况如图9所示。这10帧不同的和差比幅值如图10所示。
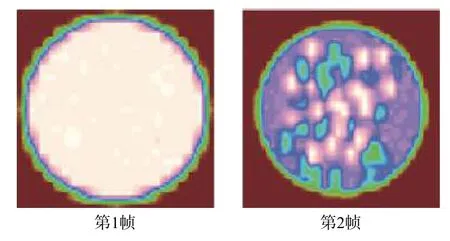

图9 不同帧的散斑图像Fig.9 Speckle images of different frames
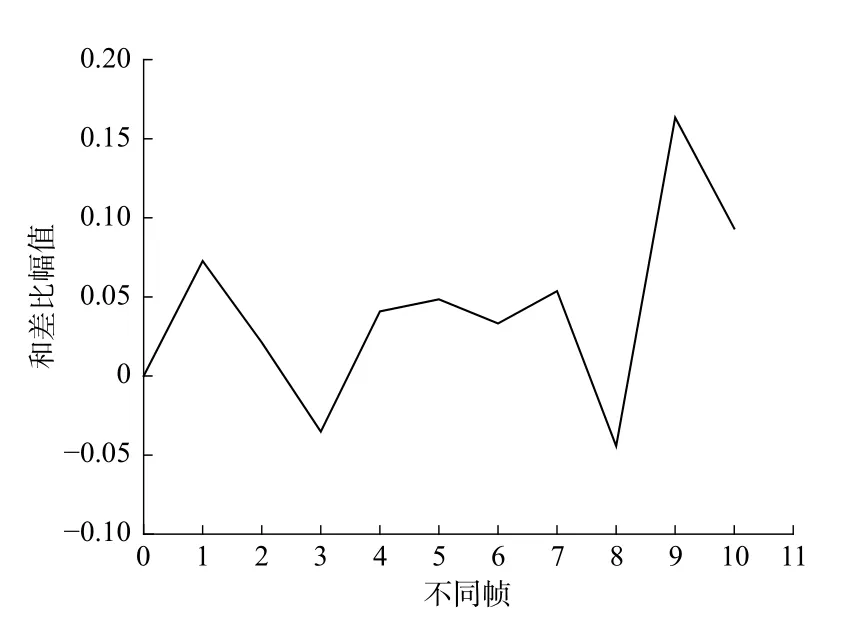
图10 不同帧散斑图像的和差比幅值Fig.10 Sum-difference amplitude of different frame speckle image
由图10可知,由于散斑的存在,明显增加了系统指令的跳动,即增加了系统的噪声。
3 试验验证
通过上述方法建立LightTools仿真模型,仿真±15°视场范围内不同视场时系统输出的和差比幅值,输出结果如图11所示。

图11 软件仿真得到的和差比幅值Fig.11 Sum-difference ratio amplitude from simulation
同时,在实验室搭建实物系统对仿真结果进行验证,如图12所示。

图12 实验系统及实验现场Fig.12 Experimental system and experimental site
实验时探测系统安装在转台上随转台进行转动。转台每转动1°数据采集1次,转台运动范围为±15°,得到的实验数据如图13所示。
对比图11和图13可以看出,各视场角输出的和差比幅值基本一致,验证了仿真模型的正确性。

图13 实验得到的和差比幅值Fig.13 Sum-difference ratio amplitude from experiment
4 结论
本文采用LitghtTools 软件完成了一个激光四象限探测系统的建模,模型中包含了激光目标模型、激光光学系统模型和激光四象限探测器模型。同时,依据此模型完成了±15°范围内的和差比幅值仿真。通过和实验数据对比可知,仿真结果与实验结果基本一致,验证了模型的正确性。另外,通过模型仿真还可以对系统的杂散光等性能进行评估,为后续的优化和改进提供准确的依据。本文提出的基于LitghtTools的仿真方法准确、有效,有利于进一步提升设计准确性,并缩短系统的研制周期。
猜你喜欢
上海电机学院学报(2021年5期)2021-02-11
数字通信世界(2021年2期)2021-01-13
中国惯性技术学报(2020年2期)2020-07-24
保健与生活(2020年12期)2020-06-23
中国眼镜科技杂志(2019年9期)2019-11-11
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
雷达学报(2017年3期)2018-01-19
