
工业控制系统的信息物理因果流模型
2021-04-09 05:46阳小华张俊杰罗永坚马家宇刘杰刘华
计算技术与自动化 2021年1期
阳小华 张俊杰 罗永坚 马家宇 刘杰 刘华


摘 要:工业控制系统向智能控制的发展随着人工智能的因果革命也应该进行因果建模的思考。通过提出工业过程控制系统的单、多层信息物理结构,引入信息、物理因果流,建立過程控制系统的信息物理因果流模型,为依据因果关系设计工业控制系统、分析控制运行机制、实施系统故障预测和监控等提供理论基础和描述框架。
关键词:过程控制系统;信息物理结构;因果流模型
中图分类号:TP13 文献标识码:A
Cyber-physical Causal Flow Model of Industrial Control System
YANG Xiao-hua, ZHANG Jun-jie, LUO Yong-jian, MA Jia-yu, LIU Jie, LIU Hua
(School of Computer/Software,University of South China,Hengyang,Hunan 421001,China)
Abstract:The development of industrial control systems to intelligent control should be considered for causal modeling along with the causal revolution of artificial intelligence. By delimiting single and multi-layer cyber-physical structures of industrial process control systems, introducing cyber-physical causal flows, and establishing cyber-physical causal flow models of process control systems, we provide the theoretical basis and description framework for design of industrial control systems, analysis of control mechanisms, and implement of fault prediction and monitoring based on causality.
Key words:process control system; cyber-physical structure; causal flow model
德国工业4.0预测信息物理融合系统CPS (Cyber-Physical Systems)是工业控制系统(ICS,Industrial Control System)的发展方向[1]。CPS的涵义是计算资源与物理资源紧密结合与协同,数据日益成为智能制造的核心资源,人工智能技术正在触发制造工业中模式、方法、生态的改变,工业控制正在向“数据驱动”的智能控制转型。
大多数智能控制方法可以归属到机器学习中,特别是归纳学习[2]。而人工智能、机器学习正在从基于相关关系向以因果模型为基础转变。图灵奖得主、贝叶斯网络之父Judea Pearl在NIPS 2017的报告和随后的论文中提出了对机器学习,特别是深度学习背后理论的思考[3-4]。依据Pearl的观点,目前机器学习的方法有难以逾越的内在限制,很多任务是当前使用相关关系的系统无法实现的,人类的AI不能单纯地从盲模型的学习机器中出现,它需要数据和模型的共生协作,统计关联关系必须结合因果建模才能完成。Michael l. Jordan、Yann LeCun、李开复等人工智能专家都认为AI应奠定在因果关系的基础上,因果关系是人工智能、机器学习等的基石[5-7]。罗振兵教授提出的基于新型因果逻辑原理控因致果的科学方法论——因控论[8]、郭雷等提出的因体果[9]、杨洪玖提出的因果场[10]等理论对因果关系在智能控制系统的应用都进行了有益的探索。
因果关系作用学派认为因果关系是原因实体通过施加作用改变结果实体而产生,因果作用就是在原因和结果之间传输和交换了某些守恒量[11-12]。从CPS角度,因果作用通过传递物理量或信息量达成,可以用信息物理因果流描述。因果关系及其作用过程在复杂性科学、系统科学哲学等领域已开展了大量研究。但是迄今为止,关于工业控制系统的因果流研究非常有限,而针对信息物理因果流模型的研究更为缺乏。
从CPS的角度为工业控制系统(以下简称工控系统)建立分层信息物理结构,将信息物理因果流引入工控系统,建立了工控系统的信息物理因果流模型,旨在为基于因果流的智能控制系统分析、设计、监控、失效处理等奠定基础。
1 简单控制系统的信息物理因果流
1.1 简单控制系统的信息物理结构
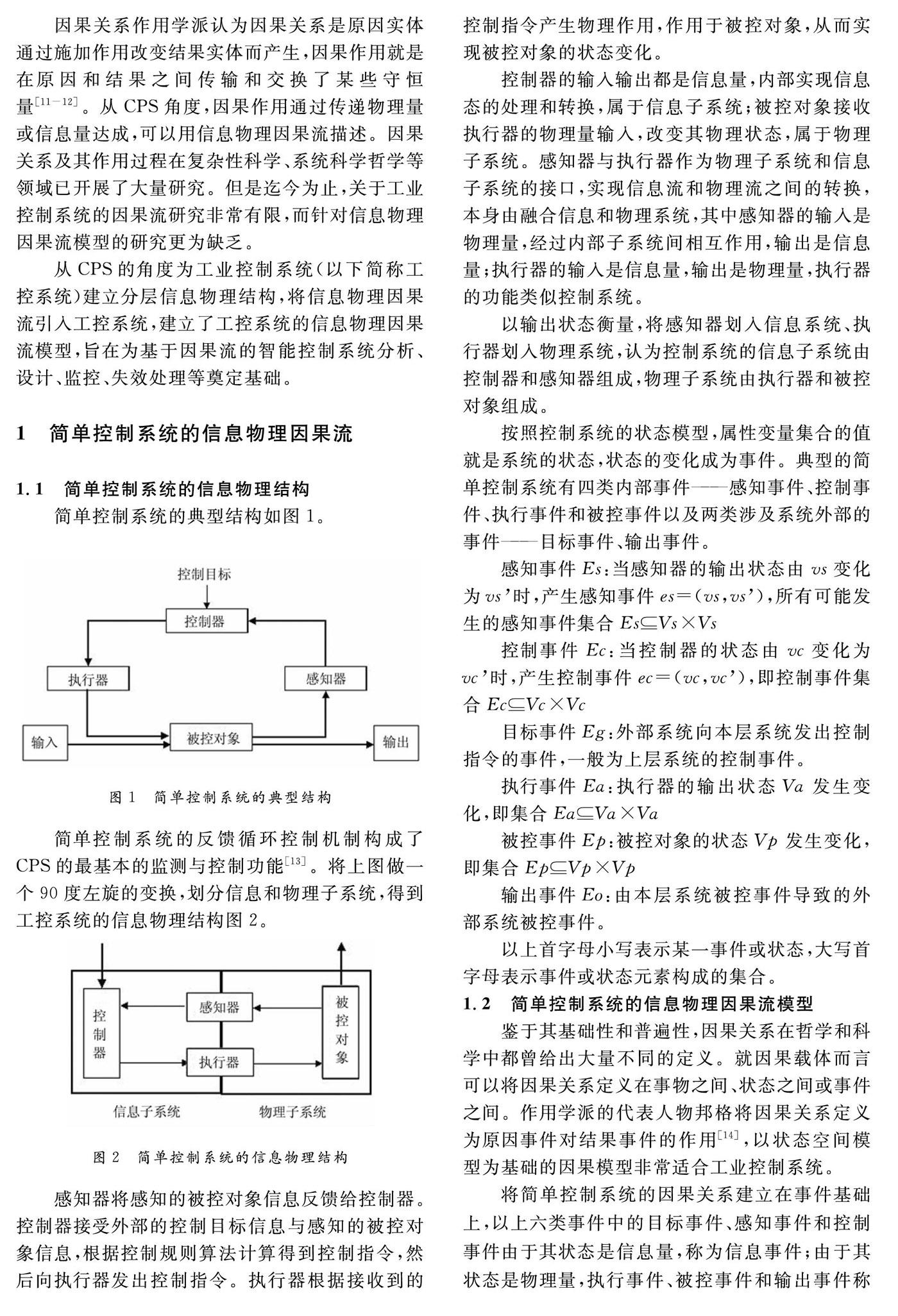
简单控制系统的典型结构如图1。
简单控制系统的反馈循环控制机制构成了CPS的最基本的监测与控制功能[13]。将上图做一个90度左旋的变换,划分信息和物理子系统,得到工控系统的信息物理结构图2。
感知器将感知的被控对象信息反馈给控制器。控制器接受外部的控制目标信息与感知的被控对象信息,根据控制规则算法计算得到控制指令,然后向执行器发出控制指令。执行器根据接收到的控制指令产生物理作用,作用于被控对象,从而实现被控对象的状态变化。
控制器的输入输出都是信息量,内部实现信息态的处理和转换,属于信息子系统;被控对象接收执行器的物理量输入,改变其物理状态,属于物理子系统。感知器与执行器作为物理子系统和信息子系统的接口,实现信息流和物理流之间的转换,本身由融合信息和物理系统,其中感知器的输入是物理量,经过内部子系统间相互作用,输出是信息量;执行器的输入是信息量,输出是物理量,执行器的功能类似控制系统。
以输出状态衡量,将感知器划入信息系统、执行器划入物理系统,认为控制系统的信息子系统由控制器和感知器组成,物理子系统由执行器和被控对象组成。
按照控制系统的状态模型,属性变量集合的值就是系统的状态,状态的变化成为事件。典型的简单控制系统有四类内部事件——感知事件、控制事件、执行事件和被控事件以及两类涉及系统外部的事件——目标事件、输出事件。
感知事件Es:当感知器的输出状态由vs变化为vs时,产生感知事件es=(vs,vs),所有可能发生的感知事件集合EsVs×Vs
控制事件Ec:当控制器的状态由vc变化为vc时,产生控制事件ec=(vc,vc),即控制事件集合EcVc×Vc
目标事件Eg:外部系统向本层系统发出控制指令的事件,一般为上层系统的控制事件。
执行事件Ea:执行器的输出状态Va发生变化,即集合EaVa×Va
被控事件Ep:被控对象的状态Vp发生变化,即集合EpVp×Vp
输出事件Eo:由本层系统被控事件导致的外部系统被控事件。
以上首字母小写表示某一事件或状态,大写首字母表示事件或状态元素构成的集合。
1.2 简单控制系统的信息物理因果流模型
鉴于其基础性和普遍性,因果关系在哲学和科学中都曾给出大量不同的定义。就因果载体而言可以将因果关系定义在事物之间、状态之间或事件之间。作用学派的代表人物邦格将因果关系定义为原因事件对结果事件的作用[14],以状态空间模型为基础的因果模型非常适合工业控制系统。
将简单控制系统的因果关系建立在事件基础上,以上六类事件中的目标事件、感知事件和控制事件由于其状态是信息量,称为信息事件;由于其状态是物理量,执行事件、被控事件和输出事件称为物理事件。6类事件之间存在3种信息流和3种物理流,支撑起因果作用,导致各类事件的次第发生。
目标事件Eg产生控制目标信息流Fgc,控制器接收Fgc导致控制事件Ec发生,记作Fgc:Eg→Ec
感知事件Es产生感知状态信息流Fsc,控制器接收Fsc导致控制事件Ec发生,记作Fsc:Es→Ec
控制事件Ec產生控制指令信息流Fca,执行器接收Fca导致执行事件Ea发生,记作Fca:Ec→Ea
执行事件Ea产生执行动作物理流Fap作用于被控对象导致被控事件Ep发生,记作Fap:Ea→Ep
被控事件Ep产生被控状态物理流Fps,感知器获取Fpo导致感知事件Es发生,记作Fps:Ep→Es
被控事件Ep产生被控状态物理流Fpo,导致输出事件Eo发生,记作Fpo:Ep→Eo
以结点代表控制系统结构图中的成员对象——控制器对象、感知器对象、执行器对象、被控对象,以对象的属性变量集作为结点的标记,以边表示对象之间的信息或者物理流(虚线表示信息流、实线表示物理流),则得到如下的简单控制系统信息物理因果流模型:
Ec是控制器的信息事件集合,Es是感知器获取被控对象状态的信息事件集合;Ea是执行器的内部状态变化的物理事件集合,Ep是被控系统物理状态变化的事件集合。
简单信息物理系统的基本结构除上图的闭环结构外,还有开环结构,无测量感知路径,从图模型角度即模型对象和方法为空集的情况:
开环控制:Fsc=Φ,Es=Φ,Fps=Φ
如图4:
如果Fca和Fps两个方法都缺失,则两个子系统之间的变量不存在约束,不是一个控制系统。若缺Eg或Ep,意味着没有控制目标或被控对象不可观,不是独立的控制系统。
2 过程控制系统的信息物理因果流
2.1 过程控制系统的信息物理结构
过程控制指对工业生产中连续的或按一定程序周期进行的生产过程的自动控制[15],要求保持过程中的有关物理参数为一定值或按一定规律变化。过程控制系统一般由简单控制系统串级组成[16],如图5所示。
被控流程的每个子过程对应着一个简单控制系统,串联在一起得到多层信息物理过程控制结构,如图6。
2.2 过程控制系统的信息物理因果流模型
由过程控制系统的信息物理模型得到如下的信息物理因果流模型:
2.2.1 一般过控系统的信息物理因果流模型
如图7中上标为系统层级,1层为顶层,N层为底层。第K层工控系统内部状态VsK、VcK、VaK、VpK的变化分别为感知事件EsK、控制事件EcK、执行事件EaK和被控事件EpK,涉及外部的目标事件和输出事件分别是上层系统的控制事件和被控事件,即EgK=EcK-1;EoK=EpK-1。
第K层工控系统事件之间的信息流和物理流为:FgcK、FscK、FcaK以及FapK、FpsK、FpoK。FgcK+1是第K层工控系统与下层(第K+1层)工控系统之间的信息流,是发给下层系统的控制命令,导致第K+1层工控系统发生控制事件EcK+1,在其自身及子系统(第K+2层及以下)的内部控制作用下,产生被控事件EpK+1,提供第K层工控系统所需的物理量输入,即FpoK+1。
2.2.2 缺失执行器的上层系统结构
在多层过程控制结构中,下层工控系统接受上层系统控制器的控制作用,通过Fgc输入控制目标,通过Fpo输出物理作用,相当于父系统中一个内嵌的子工控系统作为其内部执行器对象。父系统的执行器分层扩展为下层子系统后,若无本层执行器从图模型的角度是无控制执行路径的情况,即由下层子系统执行控制:Fca=Φ,Ea=Φ,Fap=Φ,如图8。
2.2.3 典型过控系统的信息物理因果流模型
常见的典型过程控制系统有串级、比值、前馈-反馈、选择性、分程以及三冲量等。下面以串级、分程、前馈等控制结构为例,具体说明过程控制系统的信息物理因果流模型。
1)串级控制
串级控制的传统结构如图11,被控对象(过程)有主对象、副对象两个,各自有控制器和传感器,形成两层控制系统,其信息物理因果流模型如图10。
其中Ep1、Es1、Ec1分别是主被控对象、主感知器和主控制器事件;Ep2、Es2、Ec2、Ea2分别是副对象、副感知器、副控制器和执行器事件,形成两层的信息物理因果流模型。
值得注意的是,上图顶层中是没有执行器,主被控对象状态的改变是通过下层的工控系统对副对象的改变来达成的。下层子系统接受上层父系统控制器的控制目标信息流Fgc,通过本层的单层信息物理流环路,向上层输出物理流Fpo,从而改变主对象的状态。因此,下层子系统就相当于父系统的内部执行器对象。
2)分程控制
同理,分程控制系统如上图示意,也可以按多层信息物理结构,建立分程控制信息物理因果流模型,如图12。
如图12,Ea和Ea分别是两个执行器的物理事件,分程控制系统内部存在同一层级的两个流循环:Fps→Fsc→Fgc→Fca→Fap→Fps→...以及Fps→Fsc→Fca→Fap→Fps→…。
3)前馈-反馈控制
前馈系统通过开环控制实现对扰动的补偿,往往与反馈系统结合起来使用,构成前馈-反馈控制系统,如图13。
前馈-反馈系统由同一层次的两个简单控制系统组成,建立信息物理结构模型如图14。
如图14所示,流循环Fps→Fsc→Fca→Fap→…实现反馈控制;Ep是控制系统扰动的物理事件,由Fps→Fsc→Fca→Fap实现开环前馈控制,抵消Fpo传递给被控对象的物理扰动。
3 工控系统的信息物理因果流运行机制
以系统论的观点,系统由子系统构成,子系统还可以包含下級子系统,不同层级形成了系统的层次结构。事件发生在系统或子系统内部,是系统状态或子系统状态的变化,随同所属系统(子系统)的层级有不同的层级。高层事件是系统的、整体的事件,体现了系统整体的功能,代表系统与外部环境或包含它的更大的系统之间的相互作用。低层事件是子系统的、组分的事件,代表系统组分的功能,在系统内部与其他组分一起共同支撑系统整体的功能,从系统外部看一般是无需了解的。这样,过程控制系统整体上可以视为一个大的工控系统,如图7,内嵌从1层到N层不同层级的子系统,以Fgc1为输入、Fpo1为输出有一个贯穿各层的大信息流和物理流;根据被控对象分层控制的需要,内嵌各个层级的子工控系统,每层子系统都存在信息流和物理流的小循环。当然相邻的几个层级系统也可以组合成一个多层信息流、物理流循环。工控系统的控制原理和控制机制依靠这些流的循环实现。
3.1 过控系统的基本事件流
系统顶层控制器接收外部的控制目标信息流Fgc1(获得控制系统的总目标),一方面产生本层控制事件Ec1,通过控制指令信息流Fca1导致本层执行事件Ea1发生,引起被控对象的事件Ep1,导致感知事件Es1发生,进而又触发控制事件Ec1产生,一连串事件形成顶层的事件流环路:
Ec1Fca1Ea1Fap1Ep1Fps1Es1Fsc1Ec1
另一方面,顶层控制器也将产生目标事件Eg 2,对下层系统发出控制目标信息流Fgc2,导致第2层控制事件Ec2发生,进而导致执行事件Ea 2、被控事件Ep2、感知事件Es2,形成进入次层的事件流环路:
Eg2Fgc2Ec2Fca2Ea2Fap2Ep2Fpo2Ep1Fps1Es1Fsc1Ec1
一般而言,第K层控制器的输入信息流有两类——上层K-1层控制器发出的控制目标信息流FgcK和本层的感知状态信息流FscK,除底层N层之外信息流触发的事件也有两类——本层控制事件EcK和下层目标事件EgK+1,由此形成两类事件流环路:
EcKFcaKEaKFapKEpKFpsKEsKFscKEcK
以及
EgK+1FgcK+1EcK+1FcaK+1EaK+1FapK+1EpK+1FpoK+1EpKFpsKEsKFscKEcK
3.2 基于流循环的嵌套控制机制
基本事件流可以组成三个层级的信息物理流环路。
一是最基本的单层环路:
FcaK→FapK→FpsK→FscK→FcaK→……;
二是由多个层次组合而成的多层环路:
FgcK+1→FcaK+1→FapK+1→FpoK+1→FpsK→FscK→……;
三是由全局信息流和全局物理流组成的全局系统环路。
从整体看,系统有一个自顶向下的全局信息流
因此,过程工业的生产过程就是一个以系统目标为导向的信息流和一个以系统产出为导向的物理流通过单层、多层和全局环路交互协同的过程。
4 核蒸汽发生器水位控制系统的信息物理因果流
4.1 核蒸汽发生器水位控制原理
蒸汽发生器(SG)是一回路和二回路的连接设施,蒸汽发生器水位控制系统是核电厂关键设备。核电厂正常运行时,蒸汽发生器必须要保持正常的水位。若水位过高,将导致流向汽轮机的蒸汽湿度过大,有可能损坏汽轮机叶片,或造成阀门带水操作;若水位过低,即二次侧水量过少,会引起一回路的冷却不充分。蒸汽发生器水位取决于反应堆冷却剂温度、蒸汽流量、给水温度和给水流量。蒸汽发生器水位控制系统原理见图15。
系统根据给水流量、蒸汽流量和蒸汽发生器水位三个要素控制主给水控制阀。水位是要调节的参数,水位整定值由代表负荷大小的汽轮机高压缸第一级叶轮后的压力确定。水位测量值与水位整定值间的偏差信号与给水流量与蒸汽流量差值作比较,再通过手动一自动控制器控制主调节阀。
4.2 核蒸汽发生器水位控制系统信息物理因果流模型
按照以上信息物理因果流结构为SG水位控制系统建模如图16。
图中上层SK为SG水位控制系统,SK+1為下层给水流量子控制系统。SK的事件EsK、EcK、EpK分别为液位感知事件、控制事件和被控事件,FgcK、FpoK、FpsK、FscK分别为液位整定信息流、输出物理流、感知物理流和感知信息流;SK+1子控制系统FgcK+1、FgcK+1、FcaK+1、FapK+1、FpsK+1、FscK+1分别为给水流量整定信息流、给水流量输出物理流、给水阀开度信息流、给水阀开度物理流、给水流量感知物理流和给水流量感知信息流;系统外部扰动事件Ep为蒸汽流量物理事件和蒸汽流量感知事件Es,发出蒸汽流量输出物理流Fpo、感知物理流Fps和感知信息流Fgc。
蒸汽发生器水位控制系统SK在信息流FgcK的作用下,获得水位目标信息,再由水位状态信息感知事件EsK产生信息流FscK,两信息流产生信息事件EcK,通过FgcK+1在下层给水流量控制子系统SK+1产生目标事件 EcK+1,给出给水流量的整定值。给水流量控制信子系统将给水流量整定值FgcK+1,与K+1层信息流FscK+1共同产生事件EcK+1,发出给水流量控制子系统执行器的控制命令信息流FcaK+1。
执行器依由信息流FcaK+1产生物理流FapK+1改变给水流量,发生给水流量物理被控事件EpK+1,再通过K层物理流FpoK+1由给水流量导致SG水位变化,产生被控事件 EpK,水位变化又通过上层物理流FpoK继续传递因果作用。
SG水位控制系统SK的事件流反馈控制运行机制如下:
EcKFgcK+1EcK+1FcaK+1EaK+1FapK+1EpK+1FpoK+1EpKFpsKEsKFscKEcK
SK+1给水流量子控制系统的反馈控制机制:
EcK+1FcaK+1EaK+1FapK+1EpK+1FpsK+1EcK+1
同理,SG水位前馈控制的信息物理流如下:
Ep'Fps'Es'Fgc'EcK+1FcaK+1EaK+1FapK+1EpK+1FpcK+1EpK
由此,依据信息物理因果流为核蒸汽发生器水位控制系统建立了因果模型。
5 结 论
以上因果模型的讨论全部局限在定性范围,抽象出控制系统的因果事件以及其间信息流和物理流传递的因果效应,解决“谁是因,谁是果”的因果发现问题,处于因控论的“寻因”阶段[2]。下一步拟采用传递熵量化信息流和物理流,定量计算事件之间的因果效应,采用脱离具体物理机制的统一信息流方法“描因”,加上以反事实分析为基础的“控因”,建立完整的因控论体系框架。
以信息物理因果流作为工业控制系统的机理描述模型可以超越微观的具体细节,从更高的抽象层面理解各类系统的统一运行机制,为应对动态复杂系统的控制难题提供因果层面的基础方法。比如,通过分析信息因果、物理因果的特性,建立信息因果流、物理因果流和混合因果流的失效模式,开辟不同于FTA、FMEA等的失效分析新方法,采用基于传递熵的因果流度量方法,采集正常运行大数据,构建系统的正常工况因果流模型,分析因果关系失效模式,建立不完全依赖系统运行失效数据的故障预测和分析的全新技术途径。
参考文献
[1] 工业 4.0 工作组 (德) 编; 刘晓龙, 郗振宇, 高金金, 等译. 德国工业 4.0 战略计划实施建议[J].世界制造技术与装备市场,2014(3):42-48.
[2] 阳小华,马家宇,万亚平,等.因果关系与复杂系统控制[J].南华大学学报(自然科学版),2019,33(5):72-77.
[3] PEARL J.The seven tools of causal inference with reflections on machine learning[J]. Communications of the ACM,2018,62(3):54-60.
[4] PEARL J.Theoretical impediments to machine learning with seven sparks from the causal revolution[C]∥Proceedings of the Eleventh ACM International Conference on Web Search and Data Mining.Marina Del Rey,CA,USA:ACMDL, 2018:3-8.
[5] http:∥medium.com/@mijordan3/artificial-intelligence-the-revolution-hasnt-happened-yet-5e1d5812e1e7
[6] http:∥medium.com/intuitionmachine/why-probability-theory-should-be-thrown-under-the-bus-36e5d69a34c9?source=linkShare-9549803b36be-1510196607
[7] 李开复. AI·未来[M].杭州:浙江人民出版社,2018:171-184.
[8] 中國科学院系统科学研究所. 第三届中国系统科学大会会前专题讲座 1:面向智能时代的因控论及其应用初探 [R/OL].[2019-01-25].http:∥iss.Amss.cas.cn/cssc2019/hqztjz/201901/t20190125_473332.Html
[9] 郭雷, 王成红, 王岩. 因果关系与因体果控制初探[J]. 控制与决策, 2018,33(5):70-75.
[10]杨洪玖, 李鹏, 袁源, 等. 基于因果逻辑关系的CPS分布式控因研究. 控制与决策, 2019,34(11):68-73.
[11]DOWE P. Wesley Salmons process theory of causality and the conserved quantity theory [J]. Philosophy of Science,1992, 59(2):200-203.
[12]HITCHCOCK C. Problem for the conserved quantity theory: counterexamples, circularity, and redundancy[J]. The Monist,2009,92(1):72-73.
[13]TABUADA P. Cyber-physical systems: position paper [C]∥Position Paper for NSF Workshop on Cyber-Physical Systems,2006.
[14]BUNGE M. The furniture of the World[M]. Dordrecht, Holland: D. Reidel Publishing Company,1977.
[15]齐卫红. 过程控制系统[M].北京:电子工业出版社,2011:124-148.
[16]柴天佑. 工业过程控制系统研究现状与发展方向[J]. 中国科学: 信息科学, 2016, 46: 1003{1015, doi: 10.1360/N112016-0006.
