反拉技术在附着式升降脚手架中的应用*
2021-04-07 06:35徐成瑶
施工技术(中英文) 2021年2期
郑 守,聂 超,徐成瑶,郑 辉
(中建海峡建设发展有限公司,福建 福州 350015)
0 引言
附着式升降脚手架的出现不仅提高了高层建筑的施工进度,而且有效解决了落地式脚手架成本高的问题[1]。搭设高度依建筑物标准层的层高而定,一般取建筑物标准层4个层高加1步护身栏的高度为架体的总高度[2]。附着式升降脚手架以电动葫芦为提升设备,使整个外脚手架沿建筑物外墙或柱整体向上爬升。传统的提升方式具有很高的势能和危险因素,具有架体结构失稳、提升系统偏心倾覆的风险[3]。脚手架提升的稳定性关系施工人员的安全及施工进度[4]。
为解决传统附着式升降脚手架提升方式中存在的问题,创新性采用电动葫芦反拉技术,减小了架体离墙间距,降低了工人操作强度,进而有效降低架体附着所需强度,巧妙地避免了电动葫芦在以往使用过程中产生歪拉斜吊的普遍现象,提高了提升的平稳性。
1 工程概况
福州世茂南通项目土建总承包工程由1层地下室、4栋超高层及6栋高层住宅组成,1号楼、5~7 号楼为超高层住宅楼,2~3,8~11号楼为一类高层住宅楼,其中,1~3,5,8号楼1层局部为公共配套用房。1,5,6号楼高141.1m,7号楼高123.7m,2号楼高98.7m,3,9号楼高99.1m,8号楼高92.0m,10,11号楼高93.3m。抗震设防烈度为7度。
本项目架体采用特制型钢与螺栓连接,宽1.1m,步距2.2m;架体总高度20.8m;架体内排竖龙骨中心离墙标准距离0.73m。
2 传动方式
附着式升降脚手架的升降动力为电动葫芦,传动方式有中心吊拉和内侧吊拉两种[4-6]。
1)中心吊拉 电动葫芦固定在悬挑梁上,悬挑梁通过螺栓固定在建筑结构上,如图1所示。理论上电动葫芦提升点为架体重心位置,架体提升时竖直上下,无倾覆力矩。然而由于机位布置及施工荷载的原因,架体重心往往会随机地偏离理论重心,使得架体升降时产生内倾或外倾,具有不确定性,易产生机位相互制约,增大了架体内应力。
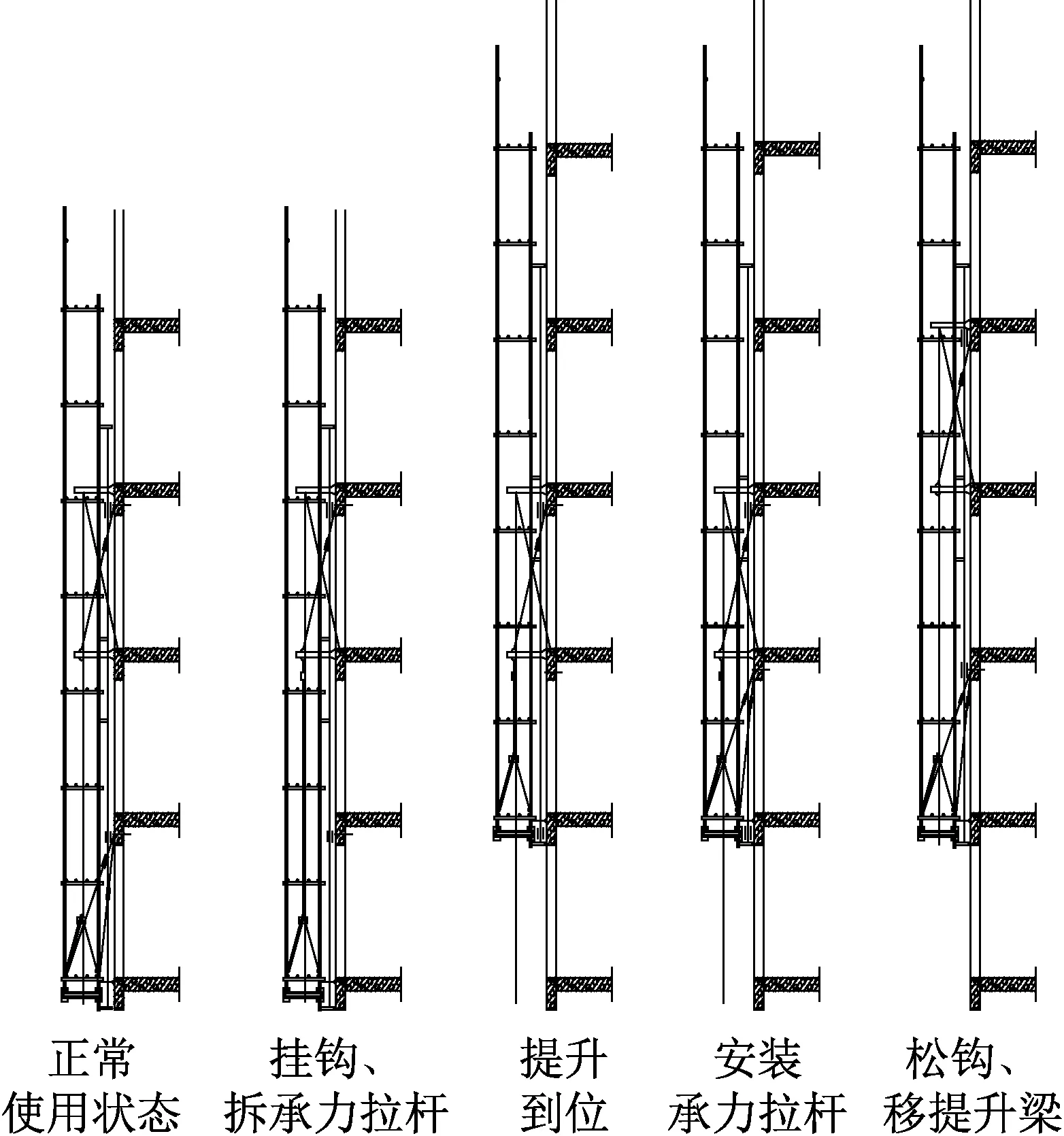
图1 中心吊拉式附着式升降脚手架
2)内侧吊拉 电动葫芦安装在附着梁上,附着梁通过螺栓固定在建筑结构上,电动葫芦提升点处于架体导轨内侧,如图2所示。架体升降时存在倾覆力矩,其大小为重心与电动葫芦挂点的距离和架体自重的乘积,架体各机位均处于外倾状态,方向统一。
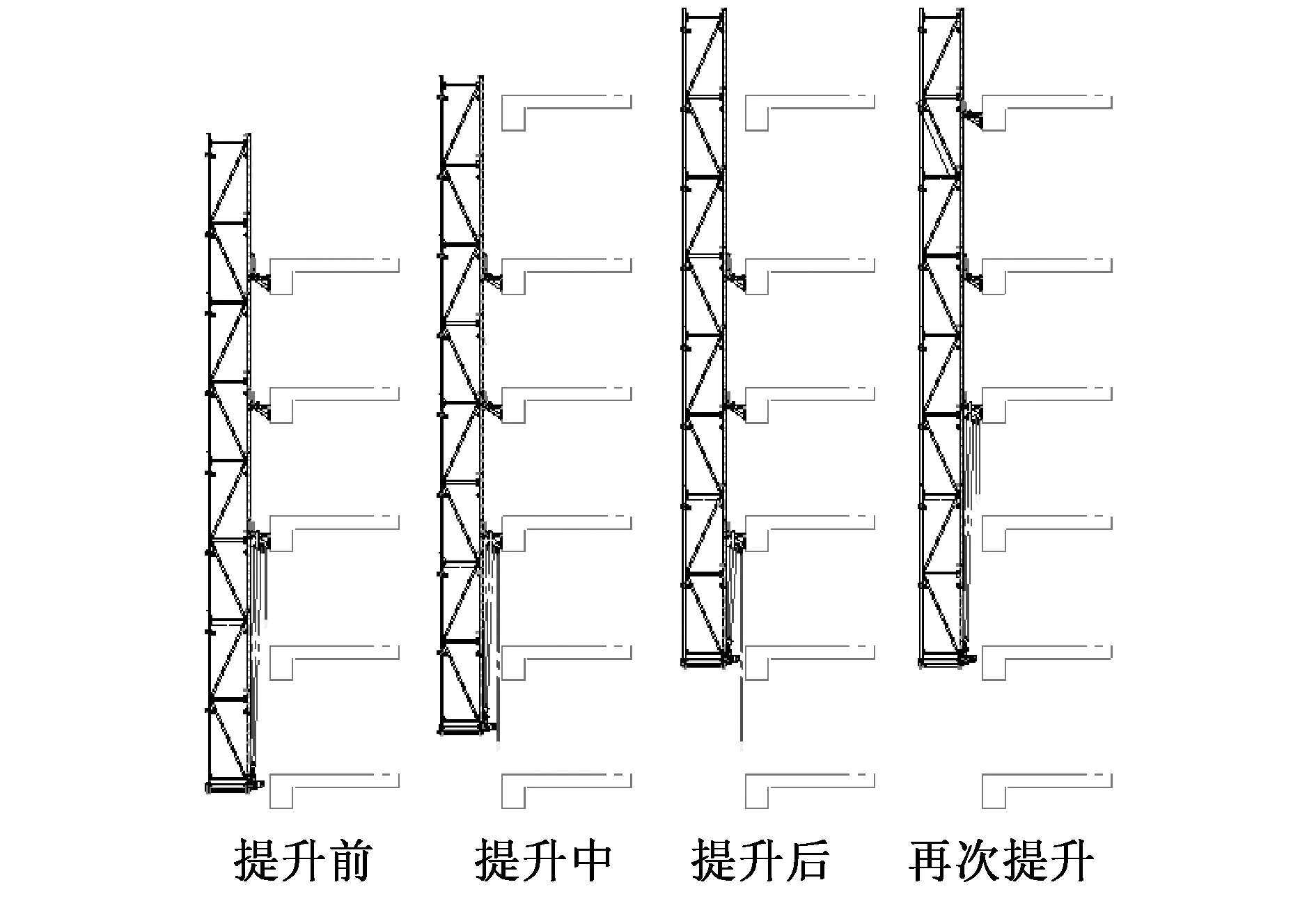
图2 内侧吊拉式附着式升降脚手架
两种传动方式的共同点是,架体提升需倒换电动葫芦挂点,电动葫芦净重85kg,倒换困难,同时倒换电动葫芦影响线路布置,易造成线路故障,影响施工进度。
3 反拉技术
3.1 反拉技术特点
1)提升过程中或相邻两次提升电动葫芦无需倒换。
2)架体升降或停靠过程中,架体倾覆力矩在可控范围内,并为其确定方向,避免机位之间产生扭曲变形。
3)若采用电动葫芦反拉技术,其链条作用方向与架体升降方向相反,需进行动力变向,反拉点与转向点之间的距离随架体升降发生变化,影响反拉力的方向,进而影响倾覆力矩。
3.2 反拉技术原理
将电动葫芦固定在架体上,随架体升降,避免每次提升需倒换电动葫芦。同时,针对倾覆力难以控制的问题,智能附着式升降脚手架采用滑轮换向,即采用钢丝绳一端固定在电动葫芦下挂钩,另一端固定在附墙挂座上,中间通过滑轮换向,滑轮与提升梁上固定点呈竖直状态,避免角度变化,保证了倾覆力矩为恒定值,且受力明确。架体升降时只需倒换钢丝绳即可,大大降低了倒换难度,如图3所示。
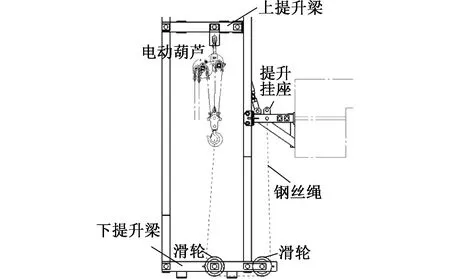
图3 反拉技术原理
4 反拉技术的实施效果
反拉技术动力系统主要由上下提升梁、电动葫芦、钢丝绳、滑轮等组成。上下提升梁固定在架体竖向主框架上。电动葫芦上钩挂在上提升梁横销上,下钩与钢丝绳钩连接,钢丝绳绕过下提升梁上的滑轮与建筑结构上的提升挂座连接,提升挂座由穿墙螺栓固定在建筑结构上,架体整体荷载通过穿墙螺栓传递到建筑结构。提升挂座上固定有抱轮,对架子整体升降起导向和防倾覆作用。脚手架提升过程如图4所示。

图4 智能附着式升降脚手架提升示意
5 反拉传动可行性验算
根据JGJ 202—2010《建筑施工工具式脚手架安全技术规范》要求,所选取的计算单元必须满足以下条件:架体高度与支架跨度的乘积≤110m2,架体计算跨度≤7m。
1)静荷载
各部件统计如表1所示。

表1 各部件统计
因此,静荷载:
∑F静=mg=3 730.91×10=37 309.1N
2)活荷载
当3步架体同时作业时取活荷载标准值2kN/m2,当为升降状态时取0.5kN/m2,取2层。
3)风荷载
根据GB 50009—2012《建筑结构荷载规范》,风荷载标准值:
Wk=βz·μs·μz·wo
风振系数βz=1,基本风压wo=400N/m2(取当地基本风压),高度修正系数μz=1.27(建筑物高度按100m,地面粗糙度按D类)。
冲孔网挡风系数φ=0.6(挡风系数φ为挡风面积与迎风面积之比,即0.5,考虑到施工过程中网眼会留有混凝土等杂物,因此确定为0.6),则体型系数:
μs=φ×1.3=0.6×1.3=0.78
Wk=1×0.78×1.27×400=396.2N/m2
4)荷载合计
按规范取动力系数γb=1.05,冲击系数γc=2.0,恒荷载分项系数γa=1.2,活荷载分项系数γq=1.4。
根据设计布置,最大跨度L=6.0m,前、后立杆距离H=0.75m。
静荷载:P静=γa∑F静=44 770.92N;
活荷载:P活=γqLH×3×2 000=37 800N;
使用时:P使=γb·(P静+P活)=86 699.5N;
升降时:P升=P静+γaLH×350=46 660.92N;
防坠时:P坠=γcP升=93 321.84N。
5)上吊挂件销轴受剪验算
上吊挂件销轴采用直径28mm Q235A圆钢轴,[f]=215N/mm2,[fv]=125N/mm2,受剪截面积As=615mm2。

6)上吊挂件焊缝强度验算
焊缝采用母材(厚度8mm)直角焊,双面满焊,焊脚尺寸hf≥6mm,由GB 50017—2017《钢结构设计标准》,在通过焊缝形心的拉力、压力或剪力作用下,当力垂直于焊缝长度方向时:
当力平行于焊缝长度方向时:


7)上承重梁强度、挠度验算
采用2[10背对背组合,长度750mm,截面模量Wx=39.7cm3,惯性矩Ix=198cm4。提升荷载P=46 660.92N,两端刚接:
Mmax=PL/8=4 374N·m
强度满足要求。
挠度满足要求。
8)抱轮抗倾覆能力验算
9)钢丝绳受力验算
经调查,选用6×37-22-1770规格的钢丝绳。根据《重型设备吊装手册》(第2册)、GB/T 8918—1996《钢丝绳》,换算系数C=0.82,K=6。
T=273.00×1.336×0.82=299.08kN
式中:T为钢丝绳的破断拉力(N);K为钢丝绳的安全系数。
升降时的荷载P=46 660.92N 经过上述验算可看出,使用正置反拉的传动方式,整体结构稳定性满足施工要求。 对于高层建筑施工,附着式升降脚手架能将高处作业变为低处作业,将悬空作业变为架体内部作业,科技含量高且更经济、安全、便捷。反拉技术的提出,使爬架提升更加稳定、便捷,对架子整体升降起导向和防倾覆作用。6 结语
猜你喜欢
北方建筑(2022年2期)2022-11-21
计算机仿真(2021年9期)2021-11-17
济南大学学报(自然科学版)(2021年1期)2021-02-22
安徽建筑(2020年7期)2020-08-05
山西建筑(2020年5期)2020-03-20
科技风(2019年8期)2019-10-21
烟台果树(2015年3期)2015-12-10
中国建筑金属结构(2011年3期)2011-01-31