
基于三维激光扫描开挖隧道掌子面信息采集提取技术及工程应用
2021-04-06 06:41
中国公路 2021年4期
(中电建冀交高速公路投资发展有限公司,河北 石家庄 050000)
一、引言
隧道内地质勘察能够预测隧道开挖面前方地质条件,为判断隧道围岩稳定性提供地质依据,是隧道能否实现安全建设的重要前提。由于传统的人工地质素描法危险性较高、效率较低,且易受人为主观因素影响,难以达到快速、客观、充分地提取地质信息的目的,因此,本文引入基于自动化采集及信息提取系统,对河北省太行山高速公路邯郸段东坡隧道项目开挖掌子面信息进行采集,并利用提取指标为隧道围岩分级与稳定性分析提供依据。
二、数据采集
采用Leica ScanStation P30激光扫描仪,设置其测距精度达1.2mm+10ppm,测角精度达±8s。进行隧道掌子面扫描时,需将激光扫描仪架立于掌子面正前方10m左右,按照测平水平,不断调整支架直至顶部呈水平布置,后固定好脚架,并设置掌子面区域的扫描角度,对测区掌子面进行高密度扫描。整个掌子面的扫描完成用时大约为3~5min。
三、点云数据预处理
(一)点云数据去噪、重采样
通过三维激光扫描获得的点云呈密集分布且含有大量噪声。此状态下,若直接对点云进行三角剖分,三角网上将会产生大量空洞和重叠,因此,笔者选择采用移动最小二乘法(Moving Least Squares,MLS)来剔除噪声。去除噪声后,三角网更加光滑,且空洞也明显减少。去噪处理前后的三角剖分对比如图1所示。
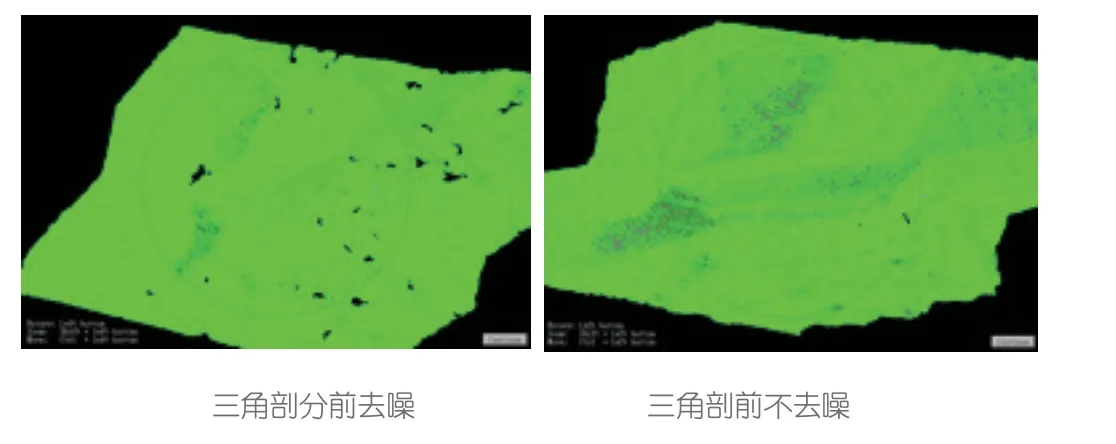
图1.去噪前后三角剖分对比图
三维重构后,由于点云密集分布且存在局部信息丢失现象,因此,笔者采用了能够修复小尺度与频繁的几何信息缺损的点云模型重采样算法。点云模型重采样算法,一方面可减小点云密度与三角面片数量,提高三角剖分和聚类分析速度;另一方面可修复或恢复点云模型的几何细节。
(二)点云三角剖分
采用Halcon 的贪婪三角剖分算法(greedy triangulation)对点云进行三角剖分,并将计算结果保存成PLY文件格式的多边形模型,再将PLY文件导入到MATLAB中读取三角网格的顶点和各个小三角面片信息,为后续的分析提前做好准备。
四、产状识别
本文采用的产状计算包含以下四个步骤:
第一,结构面自动化分组,基于样本密度和有效性指标分析,采用改进的K-均值算法对三角网数据进行自动化分组;
第二,结构面分割和优化,对同一组结构面根据相邻关系及其之间的夹角进行分割及优化;
第三,结构面平面的拟合,运用随机抽样一致性平面拟合算法拟合分割后的结构面点云;
第四,坐标系转换和产状计算,通过测得的摄像机姿态参数可将结构面法向量转换到世界坐标下表示并计算其产状。
五、迹线识别
本文采用测窗法计算平均迹线长度,具体步骤为:
第一,采用基于张量投票理论的三角网格特征边提取算法,提取组成迹线的初始特征点;
第二,采用“分组、生长算法提取迹线片段、连接迹线片段、线性化迹线”四步优化处理技术,解决由岩体表面凹凸不平导致提取出的迹线短小等问题,使迹线提取更加连续、贯通。
六、间距计算
本文是在迹线提取结果的基础上进一步计算结构面间距。具体步骤为:
第一,采用基于张量投票理论以及其优化处理技术在岩体DSM中自动化识别迹线;

图2.间距计算
第二,以主元素分析计算每条迹线主方向,如图2(a)所示;
第三,用K-均值聚类算法依据迹线主方向对迹线分组,如图2(b)所示;
第四,对各个小组内迹线的平均主方向e_K(K为小组数)进行计算。由于每个小组其测线的方向为-1/e_K,因此,只需要确定一点位置,即可自动绘制测线l_K,并计算出该测线与该小组内迹线的交点,以及得出平均间距计算结果。
七、粗糙度计算
本文采用Tse和Cruden(1979)提出的均方根(Myers,1962)来估算二维曲线JRC值。
第一,建立该结构面局部坐标系,x轴平行于走向,y轴平行于倾向;
第二,沿着结构面的倾向(y轴)用平面切割结构面以获得条状的点云,在结构面的不同位置上切割该结构面;
第三,将切割得到的条状点云平滑为轮廓线(Garcia,2010)进行等间隔采样如图3所示,以计算不同轮廓线均方根Z2,从而得到相应JRC值。
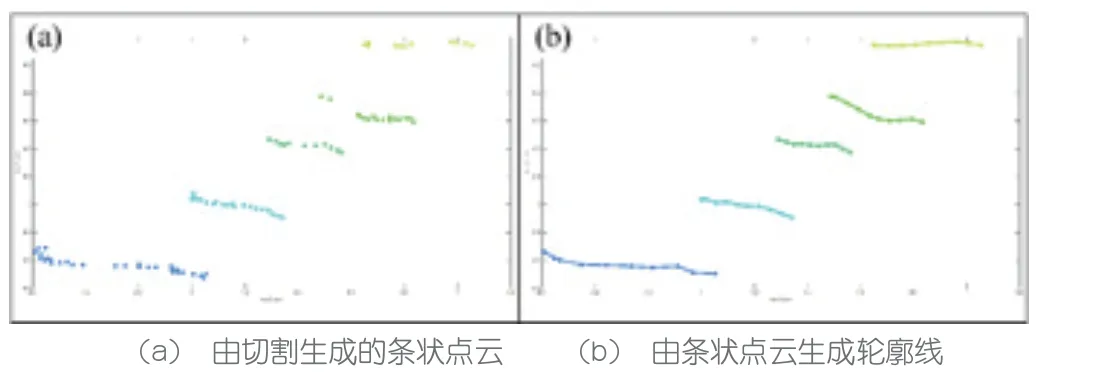
图3.粗糙度计算示意图
八、结语
本文以河北省太行山高速公路邯郸段东坡隧道为依托,运用三维激光扫描技术采集ZK38+970掌子面点云信息,通过Halcon软件预处理(去噪、重采样、三角剖分)点云,采用Matlab软件分别基于K-均值法、生长算法、测线法及JRC值,分析提取了掌子面的产状、迹线、间距及粗糙度等指标,实现了掌子面信息的精细化采集与分析,使隧道开挖过程中对围岩的分级得到极大优化,稳定分析更加精确。
猜你喜欢
油气·石油与天然气科学(2021年7期)2021-09-10
矿产勘查(2020年6期)2020-12-25
大众科学·上旬(2020年4期)2020-10-21
南京大学学报(数学半年刊)(2020年1期)2020-03-19
福建质量管理(2019年9期)2019-04-29
赤峰学院学报·自然科学版(2018年9期)2018-10-18
中国工作犬业(2017年8期)2017-08-22
中国工作犬业(2016年12期)2017-01-04
池州学院学报(2015年3期)2016-01-05
