基于物联网的校园快递派送控制系统的研究
2021-04-05 09:27:09田君航尹鸿铭钟叶飞董浩刘歆
现代信息科技 2021年17期
田君航 尹鸿铭 钟叶飞 董浩 刘歆

摘 要:互联网的快速发展带动了快递行业的空前繁荣,但快递行业仍存在“最后一公里”的资源浪费、效率低下、可靠性不足以及用户体验感差等一系列问题。文章依托物联网技术,构建智能运送机器人派件系统,制造一种具备自动取件和派送功能的机器人。该机器人可以自动循迹送货,亦可按照客户要求到指定位置取件然后再将物品运送至指定位置。从而最大限度地解放劳动力,提升物流运输效率并满足客户急件运输的需求。
关键词:树莓派;智能运送机器人;控制系统;微信小程序
中图分类号:TP273 文献标识码:A 文章编号:2096-4706(2021)17-0178-04
Abstract: The rapid development of the internet has driven the unprecedented prosperity of the express delivery industry. However, the express delivery industry still has a series of problems such as “the last mile” resources waste, low efficiency, insufficient reliability, and poor user experience. Relying on the internet of things technology, this paper constructs an intelligent delivery robot dispatch system, and builds a robot with automatic pickup and dispatch functions. The robot can automatically track delivery, or arrive at the designated location to complete the pickup process according to the customer's requirements, and then deliver the items to the customer's designated location. In this way, labor is liberated to the greatest extent, the efficiency of logistics and transportation is improved, the needs of users for urgent transportation are met.
Keywords: Raspberry Pi; intelligent delivery robot; control system; WeChat applet
0 引 言
現如今,网购已逐渐成为一种新兴的消费方式,而网购的兴起也促进了快递行业的蓬勃发展。但快递量的大幅增长也不可避免地带来一些问题,就目前市场上的区域内快递末端服务来看,主要有以下几类:使用智能快递柜或设立驿站、快递员派送、区域快递存放于附近商家[1]。这些配送模式的缺点体现在:配送成本高、配送效率低、快递人员送货时间与用户时间冲突[2]。加之2020年疫情的到来,给物流行业带来不小的影响,采用更先进更智能化的配送方案,不仅能够降低疫情期间的交叉感染,也能使人们的生活更加智能化、数字化[3]。
依托此立项背景,为解决校园、小区等小型区域的“最后一公里”问题,制造集智能仓储与物流配送为一体、具备自动取件和派送功能的机器人[4]。该机器人可以自动循迹,按照客户要求到达指定位置后对具有特定特征(快递)的物品进行自动抓取搬运派送,然后将物品运送至指定位置。智能运送机器人并不是完全脱离人的独立运行,可以实现人机交互。机器人如在自动运行过程中遇到特殊情况,可以采取人工干预方式做出相应处理。通过大数据应用3S+技术可以快速获取和更新智能运送机器人的地理位置信息,在发送客户快递通信信息的同时可以反馈自身信息。智能化技术的引入,解决了配送成本高、配送效率低、快递人员送货时间与用户时间冲突等问题,能够最大限度地解放劳动力,提升物流运输效率,为物流行业的健康发展奠定坚实可靠的技术基础[5]。
1 系统功能介绍
该项目结合机械臂控制、图像处理、3S+、互联网技术,以智能运送机器人为主要研究对象。机械臂用以通过扫描特定特征物品实现自动抓取、放置货物;摄像头可扫描二维码并记录周围信息实时反馈给云端;智能运送机器人通过红外、超声波模块避障,可自行处理突发情况,辅以GPS定位系统进行循迹。
通过物联网技术,建立计算机与智能运送机器人之间的联系,通过小程序发送任务指令。智能运送机器人提供实时反馈周围信息、实时进行信息交互,实现远程遥感等功能,以此达到自动取件和派送的目的。同时,客户还可以在微信小程序上下单,智能运送机器人根据地理位置信息进行派送,到达指定位置后,客户可以通过输入矩阵密码或者是扫描微信二维码的方式取件,具体流程为:
当客户在小程序上下单后,智能运送机器人在派送过程中会通过通信功能向指定的客户发送取件信息。小程序反馈给机器人货物坐标,机器人移动至货物所在的区域,再通过机械臂将货物取出,然后根据GPS定位规划的路线将货物运送至指定地点,在即将到达指定地点时,向取件人发送取件短信,取件人到达目标点后,需要通过扫描二维码或者是输入取货密码的方式取出货物。若还有任务,机器人则继续循迹至下一家。机器人在完成任务(或是电压低于特定值)后将自动返回指定区域,进入待机或无线充电模式。
2 系统硬件设计及各功能模块
2.1 系统硬件结构
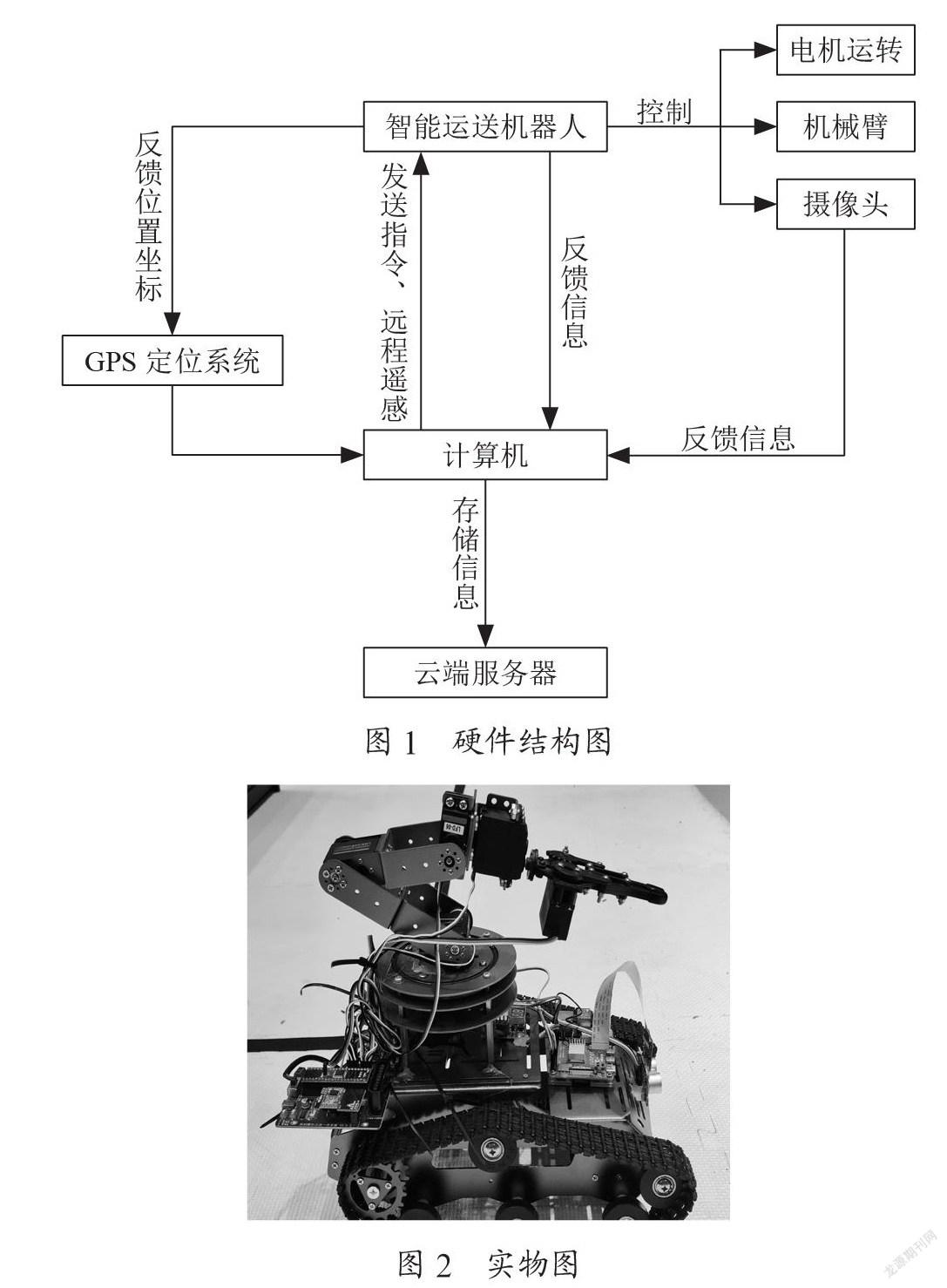
智能运送机器人的硬件组件有:RaspberryPi4树莓派主控核心芯片、HD1313OpenCV摄像头、HC-SR04超声波、四路巡线红外探测、CN3163太阳能光伏板、5HW-225无线充电、JETSON NANO机械臂、MicroSD读写卡、ATK-ESP8266串口Wi-Fi、ATK1218-BD GPS以及PS2无线遥控手柄。各部分器件通过铜柱、打胶以及连线连接。
系统硬件结构设计流程如图1所示,实物图如图2所示。
2.2 图像处理模块
使用HD1313OOpenCV摄像头进行图像处理,该摄像头可以通过机器视觉算法处理复杂的输出,从而实现人脸识别、物体识别和追踪功能。此模块主要用于实时监控快递机器人的动向以及对取件人照片的收集,避免后期不必要的损失。
2.3 循迹避障功能
循迹避障部分包括HC-SR04超声波模块和红外探测模块:(1)HC-SR04超声波模块。小车在行进的过程中,会向外界发出超声波并根据超声波传出及传回的时间来判断前方是否有障碍物,若有障碍物则停下,若无障碍物则继续前行。(2)红外探测模块。我们在小车的模拟行进路线上铺设了黑线,发射管随时发送红外线对外界进行扫描,接收管接收返回的红外信号。当扫描到黑线时,由于大部分红外线被黑线吸收,返回的红外线减少,灯便会熄灭,我们通过灯的亮灭来设计不同情况下机器人的左转右转或其他行为。
2.4 充电功能
充电功能通过5HW-225无线充电模块实现。该模块依据电磁感应原理(即变化的电流流过线圈产生变化的磁场,与紧挨的配对线圈耦合产生相应的电压)对小车进行无线充电。
2.5 物品取件功能
物品取件功能通过JETSONNANO机械臂实现。我们通过控制机械臂力矩、规划机械臂关节空间运动轨迹使其具有模仿人手动作的功能,从而实现抓取和握紧(吸附)物品等操作。
3 系统软件设计
3.1 系统运作概述
装取货物时,系统通过摄像头识别货物二维码,处理数据并反馈剩余空格子的位置,树莓派记录其坐标后将其放置在格子中。客户在小程序上下单后,云端接收订单信息后向树莓派发送订单信息,树莓派接收订单信息并反馈给机器人货物坐标,机器人移动至货物所在的区域,用机械臂将货物取出,然后根据GPS定位规划的路线将货物运送至指定地点,在即将到达指定地点时,向取件人发送取件短信。机器人到达目标点后,取件人需通过扫描二维码或者是输入取件码的方式取出货物,若还有任务,机器人则继续循迹至下一家,机器人在完成任务(或是电量低于特定值)后将自动返回指定区域,进入待机或无线充电模式。
3.2 系统主程序设计
系统主程序实现流程如图3所示。
流程實现代码为:
Main.py:(主函数)
importdianji # 0\1\2\3\4 stop\qianjin\houtui\L\R
import time
importcsb
importhongwai as hw
while True:
dianji.qd(1,50)
hw.track()
ifcsb.get_distance()<20:
while True:
dianji.qd(0)
ifcsb.get_distance()>20:
break
3.3 微信小程序设计
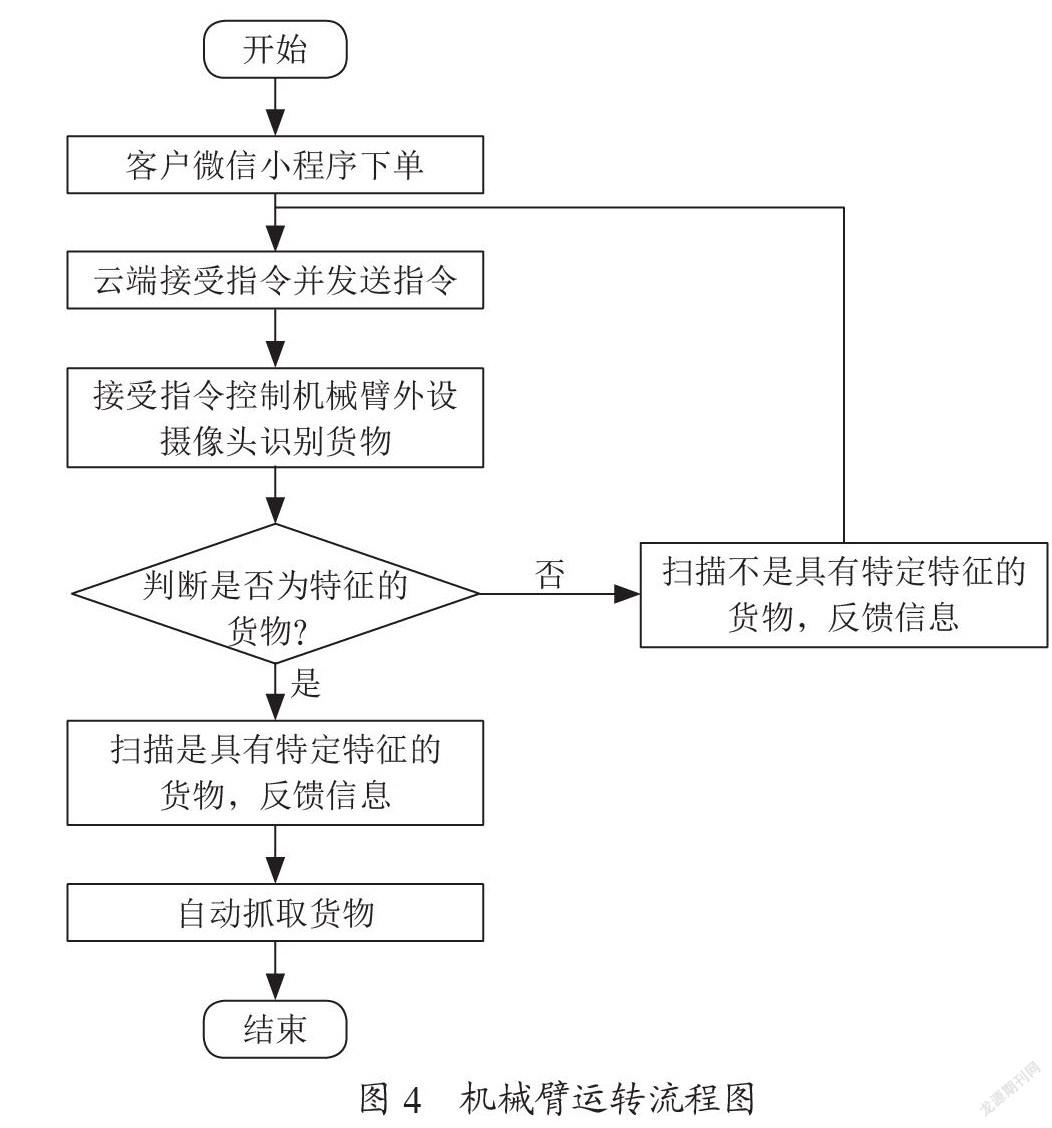
将微信小程序设计为用户可以在上面下单并提交快递信息,当快递件到达时,用户可以通过扫描二维码或输入取件码的方式取件。通过微信小程序和云端控制,可以满足客户需求。通信功能实现方式为:客户通过小程序下单,云端接收指令后向智能快递机器人发送指令,机器人控制系统控制机械臂自动识别并抓取货物,如图4所示。
快递到达指定地点后,客户可通过微信小程序扫码或输入取件码的方式提取快递包裹,云端可通过用户输入的取件码,判断是否为客户所需的快递。如果客户输入的取件码不正确,则取件失败,并且客户可以根据自己的需求发送短信“QJ”指令到云端,云端将会重新为其发送取件码,如图5所示。
微信小程序客户下单核心代码为:
async submit() {
let info = {
userAddress: this.data.userAddress,
userSize: this.data.selectedUserSize,
remark: this.data.remark,
price: this.data.price,
time: this.data.times[this.data.times_index],
store: this.data.stores[this.data.stores_index],
number: this.data.number[this.data.number_index]
}
Let oldInfor = await wx.getStorage({
key: "info"
}).catch(_=>{})
if (oldInfor) {
let newInfor = oldInfor.data
newInfor.push(info)
wx.setStorage({
key: "info",
data: newInfor
})
} else {
wx.setStorage({
key: "info",
data: [info]
})
}
console.log(await wx.getStorage({
key: "info"
}));
wx.showToast({
title: 'ok!',
})
wx.navigateBack({
delta: 1
})
}
应用界面如图6所示。
4 实物测试
接通电源后机器人沿着规划的路线循迹,途中我们用手对其进行遮挡,在识别到前方有遮挡物后,机器人停止了移动,在我们将手拿开后机器人继续前行,同时,机器人将摄像头捕捉到的信息实时返回给电脑,我们可以通过其返回的信息对机器人进行远程遥感,实现实时信息交互等功能。如图7、图8所示,无线充电模块通过电磁感应对机器人进行充电,图9显示电压为12.5 V,电流為0.69 A,表示正在进行无线充电。
5 结 论
基于物联网技术的校园快递派送控制系统能够实现校园快递的无人配送,并根据用户的需求选择合适的时间进行配送,在方便用户、提高用户体验感的同时还能降低各种配送成本,助力于各大快递公司的规模化发展,这是一种双赢的选择。
参考文献:
[1] 赵丽萍,王伟全.智能化快递末端配送设计模式初探 [J].科技与创新,2016(22):29.
[2] 胡凯程,林立,谭青青.面向社区的智能无人快递小车(机器人)创新设计研究 [J].信息系统工程,2018(9):45-46.
[3] 任静,尚景文,何庆柏,等.后疫情时代我国物流智能配送发展现状及策略 [J].商业文化,2021(11):94-95.
[4] 席悦.“最后一公里”快递柜成行业新风口 [J].中国物流与采购,2017(21):46-47.
[5] 沈逸飞,朱真逸,王逸飞,等.“人工智能+物流”中智能配送与管理的应用 [J].科技风,2021(8):74-75.
作者简介:田君航(2001.01—),男,苗族,贵州雷山人,本科在读,研究方向:电气工程及其自动化;通讯作者:吴韬(1979.08—),男,回族,宁夏石嘴山人,副教授,学士学位,研究方向:电力电子与电力拖动。
猜你喜欢
决策探索(2017年12期)2017-07-13 11:11:12
图书与情报(2016年6期)2017-04-17 23:54:02
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
科教导刊(2016年27期)2016-11-15 22:32:51
电子技术与软件工程(2016年18期)2016-11-14 02:18:06
电子技术与软件工程(2016年18期)2016-11-14 00:43:16
数字技术与应用(2016年9期)2016-11-09 22:11:46
中国科技博览(2016年19期)2016-10-19 13:27:34
无线互联科技(2015年17期)2016-03-02 18:24:45
现代电子技术(2015年18期)2015-09-16 22:25:23