
农用喷药车的控制系统设计
2021-04-02 07:02甘敏刘国彦曹督尊赵金才
农业装备与车辆工程 2021年3期
甘敏,刘国彦,曹督尊,赵金才
(300384 天津市 天津农学院 工程技术学院)
0 引言
我国是农业大国,农业对国家经济发展具有极其重要的作用。随着科技发展,农业生产趋于机械化。喷药车与传统背负式喷雾器相比,提高了作业效率,减轻了作业员的作业负担[1]。目前我国在精准喷雾技术方面的研究有以下几种方式:(1)采用图像识别树木信息,通过计算机对图像信息进行处理分析,进而识别目标。(2)采用叶绿素光学传感器,该传感器采用领先的光学技术判断树木信息。(3)采用传感器探测树木信息,目前用到的主要有3 种,分别为红外传感器、超声波传感器、激光传感器[2-5]。而WiFi 技术发展至今,已被广泛应用于日常生活。与有线传输方式相比,WiFi 组网方便,具有较好的移动性以及扩展性。图像信息作为最直观的视觉信息,对系统的路况采集具有重要的意义[6]。
1 系统结构
我国果园喷药技术发展至今有不少成果,本次研究以山东农业大学白鹏设计的喷药车为基础,该喷药车总体包括风送系统、药泵管路系统等[7],车辆的模型如图1 所示。

图1 喷药车示意图Fig.1 Schematic diagram of spray vehicle
喷药车硬件以Arduino UNO 为主控板,采用超声波传感器获取树木信息。实验小车使用4 个电机驱动小车底部的4 个轮子,挂载在车头的摄像头获取路况信息,通过WiFi 模块将信息传输至手机,实现手机对车辆的前后左右控制。整个系统共由几部分组成:直流电机驱动模块、WiFi模块、摄像头模块、Android 设备、喷药执行机构等。总体框图如图2 所示。
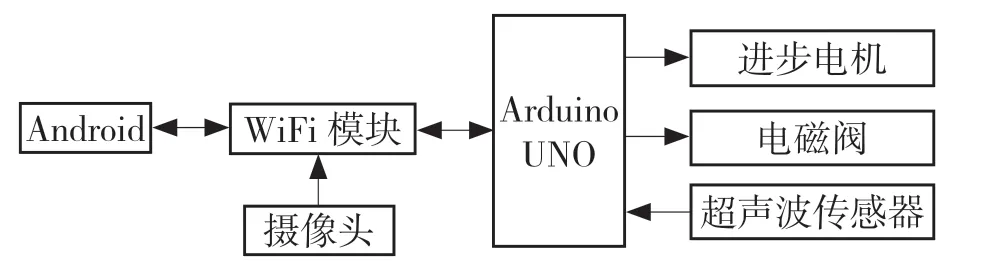
图2 总体框图Fig.2 General block diagram
2 控制模块
系统采用Arduino UNO 为核心控制器,具有14 路数字输入/输出口,6 路模拟输入输出口,进行通信时串口指示灯会闪烁,以此来显示是否进行通信。本系统中通过串口通信。除此之外,Arduino UNO 还可以与其它设备通信,但需要连接RX(接收)和TX(发送)引脚。
3 传感器的选取
目前大多数研究树木信息采用的传感器有3种,分别为超声波传感器、红外传感器、激光传感器。红外传感器容易受到光照的影响,激光传感器的性能较高,但检测目标过于单一,检测范围有限制。超声波传感器采用超声波探测对树木探测,超声波是一种球面波,方向性好,探测范围较广[7],因此,喷药控制系统采用超声波传感器采集树木信息。
4 WiFi 模块
系统选用深圳市小R 科技机器人官方商城的WiFi 模块,采用高通AR9331 芯片,模块预置openwrt 固件,150 M 带宽,执行标准为IEEE802.11b/g/h。最大连接速率可达150 Mbps。WiFi 模块通过串口与单片机进行通讯。WiFi 模块实物图如图3 所示。

图3 WiFi 模块实物图Fig.3 Real WiFi module
4.1 指令传输模块
对车辆进行控制时,手机采用TCP 协议的方式通过WiFi 信道发送指令给WiFi 模块,WiFi模块与主控板通过串口连接,因此WiFi 模块通过串口将指令发送给主控板。主控板内置的程序对指令进行解析。解析后,根据通信协议,主控板对执行机构进行控制,实现车辆的前后左右行驶,指令传输框图如图4 所示。

图4 指令传输框图Fig.4 Command transmission block diagram
4.2 视频传输模块
系统选用深圳市小R 科技机器人官方商城的摄像头模块,视频传输不经过单片机,51 单片机运算速度低,不能驱动视频传输模块。摄像头通过USB 与WiFi 模块相连,WiFi 模块通过采集挂载在USB 接口的MJPG 格式的摄像头数据,编码封装成http 协议的视频流,通过WiFi 信道将视频数据传输至手机客户端,进行解码并显示。视频获取的程序框图如图5 所示。
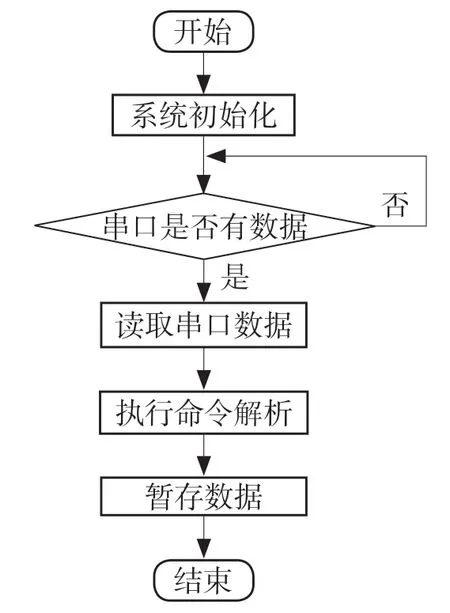
图5 视频获取程序框图Fig.5 Block diagram of video acquisition program
5 软件系统结构
5.1 主程序设计
软件系统采用Arduino IDE 进行编程,超声波传感器检测树木信息,通过串口将信息传至主控板,Arduino 对信息进行处理和判断后,输出高低电平进而控制电磁阀的开启和关闭。对于树木信息的处理,系统设置为:超声波传感器采集到树木和车的距离小于3 m,开启喷药系统,打开电磁阀后开始喷施药液。喷药控制系统程序框图如图6 所示。

图6 喷药控制系统流程框图Fig.6 Flow chart of spray control system
6 结语
采用智能小车进行实验,实验小车实物图如图7 所示。视频可以顺利传输至手机上,传输距离目前不能超过30 m,超过30 m 采集的视频会模糊不清。手机实现了对小车的行驶控制。

图7 实验小车实物图Fig.7 Physical figure of experimental trolley
对于喷药控制部分,本文研究的是车辆总体控制思路,超声波采集树木信息,主控板进行处理判断,提高了目标的准确性。如此可以减少农药喷施时造成的浪费。对于整个系统而言,减少了作业者的作业量。
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
气象水文海洋仪器(2021年3期)2021-10-15
计算机技术与发展(2020年4期)2020-04-30
物联网技术(2020年2期)2020-04-10
现代计算机(2020年3期)2020-03-05
电子制作(2019年13期)2020-01-14
数码世界(2017年5期)2017-06-06
科学家(2017年2期)2017-05-20
