传感器信息转换方法在智能感知中的应用研究
2021-04-01 08:12衡霞李宏斌
现代计算机 2021年5期
衡霞,李宏斌
(1.西安邮电大学计算机学院,西安710121;2.西安邮电大学陕西省网络数据分析与智能处理重点实验室,西安710121;3.陕西中医药大学基础医学院,咸阳712046)
0 引言
随着传感器在物联网中的广泛应用,未来的传感技术和产品的发展将朝着具有感、知、联一体化功能的智能感知系统方向发展[1]。智能手机正迅速成为人们日常生活中核心的计算和通信设备,并内置了越来越多功能强大的传感器,如麦克风、摄像头、光线感应传感器、压力传感器、温度传感器、磁力传感器、加速度传感器、陀螺仪传感器和近场通信传感器等,这些附带在移动终端上的传感器为普适学习提供了实现情境感知的基础[2]。
基于智能手机的人体行为识别目前正面临着许多挑战。在进行行为识别的过程中,不可避免地将在手机上执行复杂的分类算法,这对手机的硬件设备将是一大挑战[3-4];另外,由于手机用户使用习惯的多样化,如手机放置位置不同,是常握在手中,还是放在裤兜或手提包里,以及手机具体的方向不同,这些都将会直接影响到对用户行为进行识别分析的结果。目前智能手机都有内置传感器,用来测量运动、屏幕方向和各种环境条件。这些传感器能够提供高度精确的原始数据,非常适合用来监测设备的三维移动或定位,或监测设备周围环境的变化。Android平台支持三大类传感器,其中动态传感器可以测量三个轴向上的加速力和旋转力,具体包含加速度计、重力传感器、陀螺仪和旋转矢量传感器。在采集数据时都是依据手机坐标系,当手机放置的位置或者方向发生改变时,这些数据会随之改变[5]。在同类研究中,大多数都是使用手机内置的加速度传感器来检测用户的运动情况。文献[6]提出一种去除重力矢量的垂直方向加速度分析方法;文献[7]在此基础上计算出水平方向加速度,当用户把手机放在裤兜中行走时进行识别;文献[8]采用滤波的方法把每个轴的加速度都去除重力矢量以提高识别正确率;文献[9]提出一种将手机坐标系映射到参考坐标系的方法,但该方法只对16个特定的方向进行了讨论;文献[10]使用一组倾斜不变性运算对原始加速度进行补偿修正。从上述研究中可见,传感器放置的位置和方向对人体行为识别的正确率有很大影响。
因此为了提高行为识别正确率,减少手机方位对采集数据的影响,本文提出一种将原始加速度数据转换到统一参考坐标系的方法。该参考坐标系完全独立于手机坐标系,转换后的加速度数据有了清晰的物理含义,能够更准确地反映出人体在每个坐标轴方向的运动趋势。
1 信息转换方法
从手机传感器上得到的数据都是相对于手机坐标的,在行走过程中手机在不断晃动,它的坐标系也在不断变换,不便于进行实际运算,因此需把测试数据转换到一个相对稳定的参考坐标系,从而消除手机姿态对采集数据的影响。
1.1 手机坐标系
手机坐标系的确定与手机屏幕相关。x轴为手机屏幕平面中向右指的方向,反之为-x;y轴为手机屏幕平面中向上指的方向,垂直于x轴;而z轴为垂直于手机屏幕平面正上方向外指的方向,如图1所示。手机内置的加速度传感器在每一个采样点采集的数据,除了三轴加速度还有三个角度变化,分别为azimuth、pitch和roll。
Azimuth表示磁北极和手机坐标系y轴夹脚;Pitch表示x轴和水平面的夹角,当z轴向y轴转动时,角度为正值;Azimuth和Pitch的取值范围为[-180°,+180°];Roll表示y轴和水平面的夹角,当x轴向z轴移动时,角度为正值,它的取值范围为[-90°,+90°][5]。

图1手机坐标系
1.2 参考坐标系
研究中涉及的参考坐标系是基于标准正交基,X轴方向正切手机当前所在位置的地面,直指东方;Y轴方向同样正切于该地面指向磁北极;Z轴方向则垂直于地面指向天空[5]。如图2所示。在参考坐标系中,X、Y轴数据记录用户在水平方向(前/后,左/右)的移动,Z轴数据则记录用户在垂直方向(上/下)的移动。

图2参考坐标系
1.3 转换原理
不同坐标系之间的变换,可以通过绕不同坐标轴的连续转动并建立两个坐标系统之间一一对应关系来实现。欧拉角是用来唯一地确定定点转动刚体位置的三个一组的独立角参量,能够用来描述任意旋转,它的基本思想是将角位移分解为绕三个互相垂直轴的三个旋转组成的序列,对于任何参考系,一个刚体的取向都可以依照旋转顺序来进行转换[11]。借鉴这种思想,并参考文献[11]中刚体坐标系与参考坐标系之间互相转换方法,可以计算出参考坐标系下的三轴加速度数据为:

其中R表示描述刚体取向的旋转矩阵,即从手机坐标系到参考坐标系的映射方法,R由三个基本旋转矩阵复合而成,变量a、p、r分别表示azimuth、pitch和
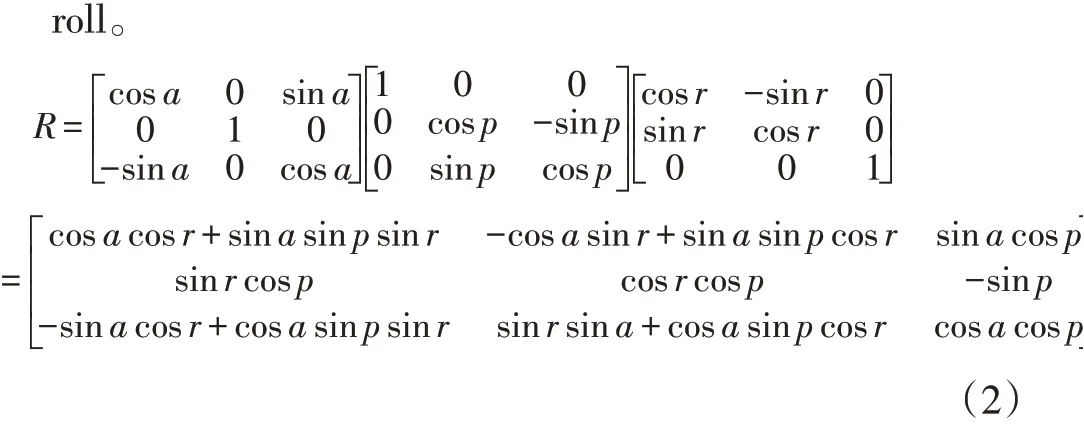
图3(a-b)重点对比用户在上楼、下楼两种运动中,三轴加速度数据转换前后的效果图。在转换后的参考坐标系中,X轴、Y轴加速度数据记录用户在水平方向的移动,Z轴加速度数据则记录用户在垂直方向的移动。针对上下楼两种不同的运动方向,从图中可以看到未转换前上楼和下楼运动的Z轴加速度数据均在[0,5]区间内变化,无法明显的区分两种运动;而转换后的Z轴加速度在不同的幅度区间内震荡,上楼的z轴加速度数据介于[5,10]区间内变化,下楼的z轴加速度数据介于[-7,-2]区间内变化,转换后的z轴加速度能更准确地反映出用户在垂直方向的运动趋势。
选取一个用户,将他在静止、走路、跑步、上下楼五种行为中采集的加速度数据进行汇总,每种行为的有效数据集为2.5秒。如图所示,未转换的Z轴加速度数据在五种行为中无明显变化,但坐标转换后Z轴加速度数据直接反映出用户不同行为的特点和变化规律。相对走路时采集的数据,跑步时用户在垂直方向的运动幅度更大,因此Z轴加速度数据震荡幅度明显增大;在上楼、下楼时,人体运动方向与参考坐标系Z轴一致或相反,在图中可以清晰看到转换后Z轴加速度数据取值范围的变化。

图3坐标转换前后两种行为的加速度数据对比

图4坐标转换前后五种行为的加速度数据对比
2 实验结果和分析
实验中我们选取了5位年龄段在22至30岁之间的实验者,用智能手机在自然环境中采集数据。每组实验者都将手机分别握在手中、放在裤兜或放在手提包里对五种不同的行为(静止、走路、跑步、上楼、下楼)采集数据。对每一个行为的采集数据周期默认设置为5秒,用户在采集数据刚一开始因放置手机等操作,前2秒采集的数据将舍弃不予考虑。因支持向量机在解决小样本、非线性及高维模式识别中表现出许多特有的优势,选取支持向量机作为分类器[12-13]。研究中设计了两组实验来验证该坐标转换方法对不同个人、不同行为的识别正确率的影响。
在第一组实验中用不同实验者的数据对坐标转换方法进行了验证。首先汇总每位实验者在三个不同位置对五种行为采集的数据,然后将这些数据按照欧拉矩阵映射到参考坐标系,对每位实验者的数据集随机选取70%作为训练集,剩余30%作为测试集;用分类器训练识别两次来对比转换前后的效果。表1罗列出每位实验者的五种不同行为的识别正确率。

表1 坐标转换前后不同实验者的识别正确率
如表1的数据显示,在对加速度数据进行坐标转换后,每位实验者总体的行为识别率都有所提高,五个实验者平均的提高率为19.64%。
在第二组实验中,为了验证坐标转换方法对不同行为的有效性,先将五位实验者采集的所有数据汇总作为一个数据集,按照实验一中同样比例分配训练集和测试集;再分类训练识别两次来对比转换前后的识别效果,如表2所示。

表2 坐标转换前后不同行为的识别正确率
考虑到不同实验者之间个体行为存在差异,该实验总体的行为识别正确率相对第一组实验略有下降。但转换后的Z轴加速度数据有了更清晰的物理含义,能够直接反映出实验者在垂直方向的运动趋势,因此对于走路、上楼、下楼这三种近似行为的识别正确率有了明显提高,如图5所示,平均对五种行为的识别效率提高了17.09%。

图5
3 结语
本文主要针对手机内置传感器采集信息的设备方向独立性进行研究,提出一种将手机内置传感器采集的加速度数据从手机坐标系转换到统一参考坐标系的方法。并结合人体基本行为数据集的识别过程,对比传感器数据转换前后对不同用户、不同行为的识别正确率的影响,两组实验均验证了该方法的有效性。
猜你喜欢
医学食疗与健康(2022年3期)2022-04-23
健康体检与管理(2021年6期)2021-11-17
大自然探索(2021年9期)2021-11-07
语数外学习·高中版中旬(2021年11期)2021-02-14
婚姻与家庭·性情读本(2019年2期)2019-03-15
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
家教世界·创新阅读(2016年11期)2016-12-27
幸福·悦读(2016年8期)2016-10-21
故事会(2016年15期)2016-08-23