面向跟踪系统的多通道传输策略研究
2021-03-31 07:03彭志荣张天乙温志坤李健波陈相德
南京信息工程大学学报 2021年1期
彭志荣 张天乙 温志坤 李健波 陈相德
0 引言
近年来,网络化控制系统(NCS)通过不断地改进,利用现场总线技术(CAN、LON)、IP/Ethernet、无线网络(Bluetooth、Zigbee、Zwave)等通信网作为通信媒介[1],将通信网络嵌入到控制系统中,使传感器、驱动装置和执行装置等现场设备与自动化系统、控制系统实现互联,从而提高现场设备的分布化和网络化,实现了复杂远程控制[2].但是受到网络通信带宽及承载能力的限制,数据在传输的过程中不可避免地会出现传输时延、丢包等问题,会影响控制系统的控制性能,甚至会导致系统不稳定,因此在研究网络化控制系统设计控制器时应该重点考虑上述问题[3].文献[4]研究了无线网络控制系统在多分组传输策略下的分组丢失和网络延迟问题的稳定性;文献[5]研究了具有传感器故障和PI迟滞的高阶随机纯反馈非线性多智能体系统的量化自适应有限时间二部跟踪控制问题,利用Lyapunov函数稳定性定理对控制系统的稳定性进行分析;文献[6]研究了具有动态量化、可变采样间隔和通信延迟的非线性网络控制系统的H∞输出跟踪控制问题,采用输入延迟和并行分布补偿技术,建立了基于Takagi-Sugeno(T-S)模糊模型的增强跟踪模型;文献[7]研究了一类具有多个包丢失的多信道网络非线性系统的鲁棒H∞状态估计问题,采用具有范数有界不确定性的T-S模糊仿射动态模型来表示非线性对象,并采用具有一般概率分布的随机变量来表征输出通道中的数据缺失现象,设计了一个保证所得到的估计误差系统在给定的H∞干扰衰减水平下的随机稳定性的容许状态估计器;文献[8]介绍了一种用于多通道有源噪声控制的扩散策略,将计算分散到多通道有源噪声控制系统的所有节点,通过多通道滤波归一化最小均方算法计算每个节点的最优权向量,从而降低计算的复杂度;文献[9]采用自适应神经网络控制方法研究了采样周期为Td的设备层采样数据非线性对象的输出跟踪问题,并对网络引起的时延和包丢失进行补偿,保证了系统的跟踪性能和稳定性.
为了减少出现时延和丢包等问题,在实际的通信过程中,采用多通道传输策略进行数据传输.多通道传输就是指待传输数据可以有多条传输通道进行传输,在可选择通道内随机选择某一条传输通道完成数据传输,数据到达率会比单一通道传输策略更高,此时更有利于实现复杂的远程控制.从研究网络化控制系统稳定性的角度出发,借助Lyapunov的稳定性判定定理,确定跟踪控制系统维持稳定的误差上界.在系统进行数据传输时,用满足Markov链的离散状态空间来描述通道选择情况,将通道传输结果引入状态空间可以得到离散时变增广状态空间的系统模型,用Markov状态转移矩阵来描述不同状态之间的转换过程,从而进行稳定性分析.文献[10]提出了一种允许在存在不同分组网络传输策略的情况下检查稳定性测量时变时滞网络反馈环的稳定性判据;文献[11]研究一类离散网络非线性系统的鲁棒滤波器设计问题,通过提出一种基于马尔可夫链描述的信道交换现象的多通道通信方案,考虑网络引起的时变延迟和数据包丢失,设计了一个误差系统随机稳定且保证给定的干扰衰减水平的容许滤波器;文献[12]提出一种基于H2/H∞滤波的无线网络控制策略,采用有向图来描述分布式传感器节点的通信拓扑,并采用不同的Markov链来描述多信道中网络引起的时延特征,提出了降低传感器输出信号的噪声干扰的闭环滤波控制系统模型;文献[13]假设只有一个符合先进先出属性的通信通道,且在不同通道的通信延迟不同的情况下研究了多通道网络离散事件系统的状态估计问题;文献[14-17]提出了基于鲁棒控制降低离散系统数据传输系统丢包和传输时延问题的策略;文献[18-20]用满足一定概率分布的概率模型来描述数据传输过程中的丢包率,对随机网络控制系统建模和控制,保证了系统具备均方指数稳定性.因此,如何利用多通道通信技术解决跟踪输出时延和丢包问题需要进一步研究.
基于以上的研究成果,本文展开了面向跟踪性能的多通道传输策略的研究.通过多通道进行数据传输,合理分配数据的冗余传输通道,使得相同的信息可以通过多条传输通道从发送端传送到接收端,从而提高数据接收可靠性,减少丢包事件的发生,确保通信过程顺利进行.用Markov随机过程描述数据传输时对通道的选择情况,结合Lyapunov函数进行系统稳定性分析,其结果更具一般性.
本文接下来的安排如下:在第1节中给出多通道传输系统模型和同步跟踪误差模型,第2节对增广误差系统进行稳定性分析和耗散性能分析,第3节设计控制器增益,第4节给出一个具体数值例子,第5节为结论.
注1本文中:上标“T”表示矩阵的转置;Rn表示n维欧几里德空间;Rm,n表示m行n列的实矩阵集;l2∈[0,∞)表示平方可积向量函数在[0,∞)上的空间;diag{·}表示对角矩阵;E{·}表示随机变量的数学期望.
1 问题描述
1.1 系统模型
考虑以下多通道传输网络数学模型:
(1)

建立与多通道传输系统(1)相同结构和参数的跟踪系统模型如下:
(2)
其中,s(k)=[s1s2…sn]T∈Rn,ys(k)∈Rp,zs(k)∈Rz分别表示跟踪系统的状态向量、测量输出和待估计信号,u(k)表示跟踪系统的外部控制输入,f(si(k))≜[f1(s1(k))…fn(sn(k))]T.
假设1如果a,b∈R且a≠b,那么系统(1)和系统(2)中的非线性激励函数fi(·)(i∈{1,2,…,n})满足下列不等式:
(3)

1.2 多通道传输策略
多通道传输策略主要是通过合理分配数据的冗余传输通道,使得信息数据可以通过多条传输通道从发送端传送到接收端,从而提高数据接收可靠性.
假设通信数据共有N条传输通道,p维待传输的数据,对于需要传输的第i维数据,多通道传输的测量输出结果表示为
(4)


2) 当φi的元素全为0,即φi=diag{0,0,0,…,0} 时,此时数据不能传输发生丢包.
(5)
因此,φi=diag{r1,r2,…,rl}中,l的值由i的范围决定:
(6)

(7)
(8)
其中:
ρ=m(p-1)+(m+m0).
符号δ(k)∈φ≜{1,2,…,}是由下列Markov链表示的时变项,其转移概率矩阵为Ξ=[πωr]∈R,且服从如下公式:
P{δ(k+1)=r|δ(k)=ω}=πωr,
(9)
1.3 跟踪误差模型
为实现跟踪系统(2)与主系统(1)间的跟踪同步,设计模型依赖控制器u(k)如下:
u(k)=Kδ(k)φδ(k)C(x(k)-s(k)),
(10)
其中,Kδ(k)∈Rρ×ρ表示待设计的控制器增益.
在进行下一步研究之前,定义跟踪误差e(k)≜x(k)-s(k)和待估计信号的误差z(k)≜zx(k)-zs(k),则跟踪误差系统可以表示为
(11)
其中,F(e(k))=f(x(k))-f(s(k)).
接下来,为了方便对误差系统(11)进行分析,引进如下的定义:
定义1[21]如果误差系统(11)在任意初始条件且噪声输入v(k)=0的情况下满足下列不等式:
(12)
那么称系统(11)随机稳定.
定义2[21]给定任意标量γ>0,如果系统(11)在零初始条件和噪声输入v(k)≠0的条件下是随机稳定的,且所有l满足l≥0时,下列不等式成立:
(13)
那么称系统(11)满足严格(Q,S,R)-γ-耗散性.其中,φ(z(k),v(k))表示能量供给率,φ(0,0)=0且在任意i2≥i1≥0的情况下满足不等式:
本文中,定义供给率φ(z(k),v(k))为
φ(z(k),v(k))≜z(k)TQz(k)+
2z(k)TSv(k)+v(k)TRv(k),
(14)
其中,Q,S,R是实数矩阵,Q=QT≤0,R=RT.
2 主要结论
2.1 随机稳定性分析
本节通过构造Lyapunov函数,结合Markov跳变方法,分析误差系统(11)的随机稳定性.
定理1对任意ω∈{1,2,…,},给定标量γ>0,τ>0,若存在矩阵Pω>0,R>0,使下列不等式(15)成立,则误差系统(11)满足随机稳定性和不等式(13),即符合严格(Q,S,R)-γ-耗散性能指标:
(15)

证明考虑噪声v(k)=0的情况下,研究系统(11)的随机稳定性.选取如下Lyapunov函数:
V(e(k))=e(k)TPδ(k)e(k),
其中,对任意Pδ(k)>0,δ(k)∈φ.定义δ(k)≜ω,δ(k+1)≜r.则有:
ΔV(e(k))=E{V(e(k+1))-V(e(k))}=

E{e(k)TATPrAe(k)+
2e(k)TATPrKωφωCe(k)-e(k)TPωe(k)+
2e(k)TATPrBF(e(k))-
F(e(k))TBTPrBF(e(k))=
ξ(k)TΗξ(k),
(16)
其中:

对于非线性函数fi(·),i∈{1,2,…,n},基于假设1中不等式(3),存在标量τ>0使下列不等式满足:
进一步,上述不等式可写为如下形式:
结合式(16)和(17),可得:
ΔV(e(k))≤ξ(k)TΘξ(k),
即
ΔV(e(k))≤-λmin(-Θ)ξ(k)Tξ(k),
其中λmin(-Θ)为矩阵Θ的最小特征值,根据定义1和文献[21]的方法可知,系统(11)随机稳定.
2.2 耗散性能分析
下面将进一步研究v(k)≠0时误差系统(11)的严格(Q,S,R)-γ-耗散性.
首先,定义新的性能指标函数J(n),
v(k)T(γ2I-R)v(k)}.
在零初始条件下,有
2z(k)TSv(k)+v(k)T(γ2I-R)v(k)}=
z(k)TQz(k)-2z(k)TSv(k)+v(k)T(γ2I-R)v(k).
(18)
将非线性条件(17)用于式(18),得到同时满足非线性条件和严格(Q,S,R)-γ-耗散性能指标的不等式:
(19)
其中:

结合定理1中式(15)和Schur补定理可知Φ<0,则
J(n)<0,∀n≥0.
根据定义2,可知系统(11)满足严格(Q,S,R)-γ-耗散性.
3 控制器设计
定理1对误差系统(11)的随机稳定性和耗散性能进行了分析,下面将基于已得到的结论进行控制器设计.
定理2对任意ω∈{1,2,…,},给定γ,若存在矩阵Pω>0,R>0,Kω使下列不等式成立,则误差系统(11)是随机稳定且满足严格(Q,S,R)-γ-耗散性能指标.
(20)


4 仿真实例
本节将通过一个仿真实例来验证所设计的基于多通道传输策略跟踪系统的跟踪可行性,同时验证设计的控制器满足随机稳定性和严格(Q,S,R)-γ-耗散性.
考虑传输网络系统(1)有3条通道,假定系统内部的参数如下:


定义
基于Matlab的LMI工具箱对系统进行求解,得到结果如图1—3所示.仿真时假定通道数为3,待传输数据2维,用Markov随机过程对通道进行选择,会出现6种组合情况,因此Markov随机跳变情况如图1所示.图2表示系统状态信号x(k)与跟踪信号s(k)的轨迹,分析图2得知,跟踪开始时跟踪信号与系统状态信号之间存在较大的误差,但二者的差距逐渐减少,最后趋于一致,说明基于跟踪误差和输出误差设计的控制器能够较好地实现跟踪的目标.图3展示了系统的性能,结合严格(Q,S,R)-γ-耗散性的定义,可以明显发现J1≥J2是成立的,因此可以证明系统满足严格(Q,S,R)-γ-耗散性.

图1 Markov跳变过程Fig.1 Markov jump process
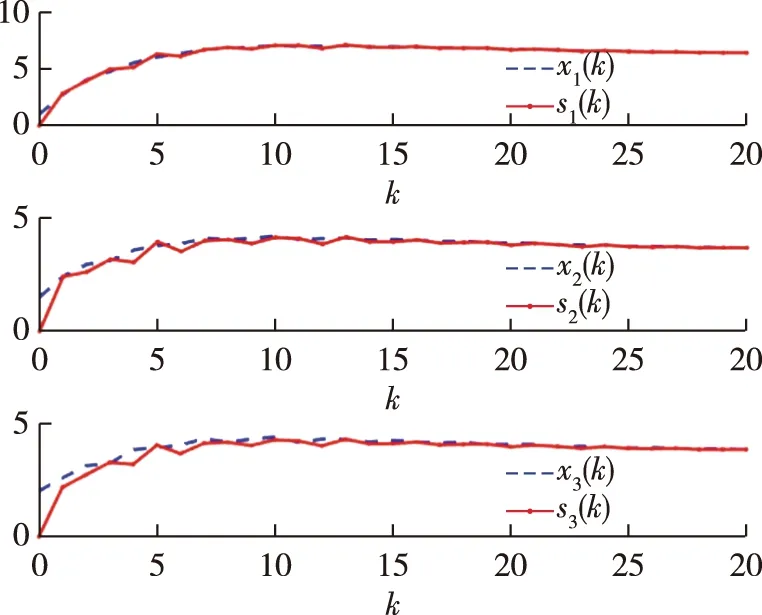
图2 系统信号x(k)及其跟踪信号s(k)的轨迹Fig.2 Trajectories of system signal x(k) and tracking signal s(k)

图3 系统能量供给与能量损耗轨迹Fig.3 Trajectories of system energy supply J1 and energy loss J2
5 结论
本文针对一类容易出现丢包问题的单通道传输系统,设计了一种多通道传输系统模型,并给出了系统的随机稳定前提下的严格耗散性能分析.为了能更加贴近真实的传输情况,本文在研究时设定了一个外部干扰信号,面对传输系统冗杂的数据,本文通过Markov随机过程对通道进行选择,以此降低丢包的概率.将一对一的测量输出系统进行扩维,设计了跟踪系统的控制器增益,使其满足随机稳定性和严格(Q,S,R)-γ-耗散性能,并通过具体数值实例验证了所提出的定理的可行性.接下来将在已有的研究基础上,把研究重心放在面向跟踪系统的多通道传输策略如何优化这一课题上.
猜你喜欢
建材发展导向(2022年20期)2022-11-03
昆明医科大学学报(2022年3期)2022-04-19
煤气与热力(2021年12期)2022-01-19
建材发展导向(2021年18期)2021-11-05
北京航空航天大学学报(2021年7期)2021-08-13
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
家庭影院技术(2020年12期)2021-01-18
新农业(2018年3期)2018-07-08
汽车文摘(2015年12期)2015-12-12