
基于PVG的甘蔗联合收割机负载敏感控制研究*
2021-03-30 11:48:34陈远玲彭卓覃东东曹镕韬张凡毅
中国农机化学报 2021年2期
陈远玲,彭卓,覃东东,曹镕韬,张凡毅
(广西大学机械工程学院,南宁市,530004)
0 引言
甘蔗是制糖的主要原料,当前我国甘蔗种植面积位居世界第三,其中广西种植面积占比达60%,但受季节天气、地形及收割机性能等因素的影响,导致我国的甘蔗收割机械化仍不足15%,远远低于美国、澳大利亚等发达国家,与巴西等发展中国家相比甚至存在较大差距,因此甘蔗的收获成本较高,这使得我国的白糖价格在国际上处于劣势[1-4]。为提高蔗农经济效益,降低劳动力强度,国家制订了相关政策来加快提高广西甘蔗收割机械化水平[5]。尽管甘蔗联合收割机在市场上已有成品出售,但其液压系统性能仍有待提高,系统能耗高,发热严重,综合性能不理想[6]。广西地形多为丘陵地带,工况复杂,导致甘蔗收割机工作时负载波动大,加上其执行元件众多,使得各执行器间的速比往往不能在负载波动的时候保持在合理范围,进而发生堵塞的情况,降低收割效率,各执行器的速比关系还会影响到甘蔗收获质量[7-10]。陈远玲等[11-14]针对广西地形多变造成的负载波动大,液压系统工作效率低等问题,采用负载敏感技术,通过AMESim对闭式负载敏感泵系统的节能性进行了仿真分析,但仿真所用载荷参数主要来源于理论计算,与实际工况有一定差距。
本文通过试验获得甘蔗联合收割机在无倒伏、有倒伏两种工况下各工作部件的载荷特征,研究将PVG负载敏感阀应用于甘蔗联合收割机液压系统的可行性,寻找能兼顾甘蔗收割机液压系统节能减耗、保持子系统间速比关系的思路和方法,优化甘蔗联合收割机液压系统的设计。
1 材料和方法
1.1 试验平台的设备及仪器
本次数据采集试验的机型为广西某企业研制的中型切段式甘蔗联合收割机,各工作部件均采用液压驱动,如图1所示。

图1 试验用甘蔗收割机Fig. 1 Sugarcane combine for test
试验采用的数据采集系统(型号:SomateDAQ-lite)能在复杂工况顺利进行数据采集,具有性能稳定,采样频率高、多通道、网络化和智能化等特点,广泛应用于汽车、工程机械及农机领域。此外,试验采用托普湿度和硬度测试仪,对试验场地的土壤湿度、硬度进行检测。
1.2 试验测试方案设计及数据采集
切段式甘蔗收割机的关键工作部件(包括:刀盘、切段及风机马达)承担了甘蔗收获的重要工序任务[15],因此将刀盘、切段及风机的马达作为主要测试对象。图2为田间载荷数据采集的方案示意图,电源采用甘蔗收割机自带的24 V直流电池,分别给SomateDAQ-lite数据采集系统、压力传感器和转速传感器供电。本次测试试验中,选择刀盘、切段和风机马达的进口压力作为压力传感器的测量点,转速传感器将脉冲信号转为转速值,传感器信号由数据采集系统进行动态采集,并在笔记本电脑中实时显示、存储。

图2 数据采集方案示意图Fig. 2 Schematic diagram of data acquisition scheme
数据采集试验分别在广西扶绥县和南宁金光农场进行,表1为试验田条件参数,各工作部件的运动参数则根据课题组前期研究得到的较优速比约束关系设定:行走速度2 km/h、刀盘转速600 r/min、切段转速250 r/min和风机转速1 500 r/min。

表1 试验田条件参数Tab. 1 Field parameters
2 两种典型工况关键部件的载荷研究
图3、图4分别为无倒伏工况和有倒伏工况各部件的转速及载荷情况。从图3可见,甘蔗联合收割机在无倒伏试验田工作时,各工作部件的压力载荷和转速有一定程度的波动;从图4中可以看出,甘蔗收割机在有倒伏工况收割时各工作部件转速、压力波动幅度很大,原因是甘蔗倒伏导致了甘蔗不规则排序,引起喂入量不均匀;此外,倒伏弯曲的甘蔗在喂入过程中容易造成与机械装置的刮碰、卡堵,多种因素综合导致载荷波动幅度增大。

(a) 刀盘马达转速

(b) 刀盘马达压力

(c) 切段马达转速

(d) 切段马达压力

(e) 风机马达转速

(f) 风机马达压力

(a) 刀盘马达转速

(b) 刀盘马达压力

(c) 切段马达转速
(d) 切段马达压力

(e) 风机马达转速

(f) 风机马达压力
运用数据处理软件Ncode统计分析出甘蔗收割机各工作部件在无倒伏和有倒伏工况收割时的转速和压力载荷,具体数值见表2、表3。

表2 各工作部件的转速情况Tab. 2 Speed of components

表3 各工作部件的压力载荷情况Tab. 3 Pressure of components
从表2、表3数据可见,有倒伏工况下各工作部件载荷的波动范围均比无倒伏工况载荷的波动范围大,其中刀盘马达受影响最大,在有倒伏工况下刀盘马达载荷波动范围是无倒伏工况的2.8倍、转速波动范围是无倒伏工况的8.1倍。甘蔗联合收割机作业时的工况常常是有倒伏工况和无倒伏工况交替出现,载荷波动很大,由此可见在甘蔗联合收割机液压系统采用负载敏感技术进行负载匹配和稳定工作部件转速是非常必要的。
3 基于PVG32负载敏感控制的研究
刀盘子系统作为甘蔗收割机最重要的工作部件之一,其工作稳定性直接影响了甘蔗切割的质量、效率和成本。本节首先介绍PVG32阀前补偿的基本组成及原理;其次,通过AMESim对PVG32阀阀前补偿进行建模分析;最后,结合刀盘马达的试验测试数据,将PVG32-A开芯系统、PVG32-C闭芯系统和普通节流调速系统进行仿真分析,对比三种系统的节能性。
3.1 两种典型工况载荷信号
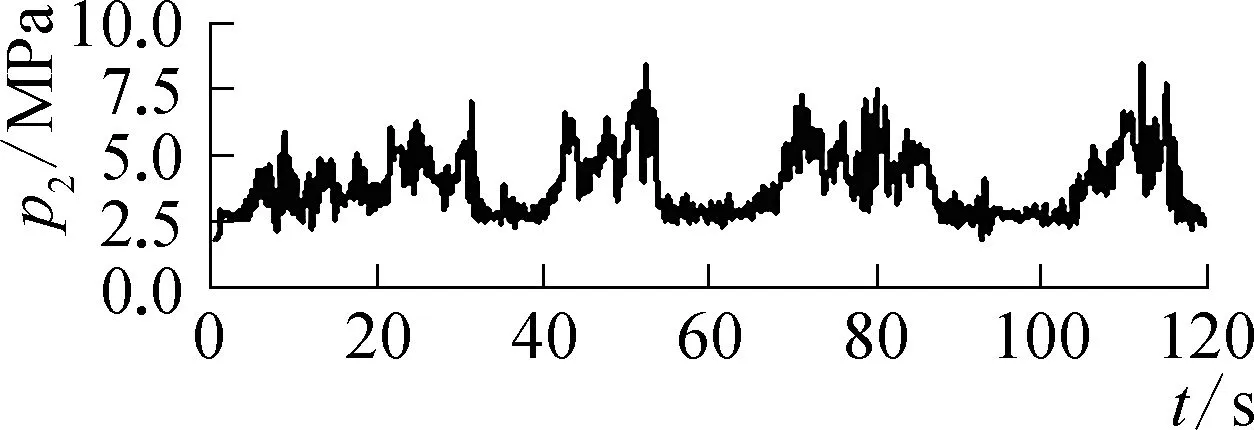
根据数据采集情况,选择无倒伏与有倒伏两种典型工况的刀盘压力及转速信号进行分析,见图5。
从图5可以看出,无倒伏工况刀盘的压力均值为7.03 MPa,转速均值为613 r/min;有倒伏工况刀盘的压力均值为9.9 MPa,转速均值为591 r/min,整个过程来回波动较大。

(a) 刀盘压力

(b) 刀盘转速
3.2 PVG32-A系统原理及建模
PVG32-A系统主要由定量泵、电机、定差溢流阀、溢流阀、换向阀、梭阀及单向阀等组成。其中由三通型压力补偿器构成的定差溢流阀结构示意见图6。
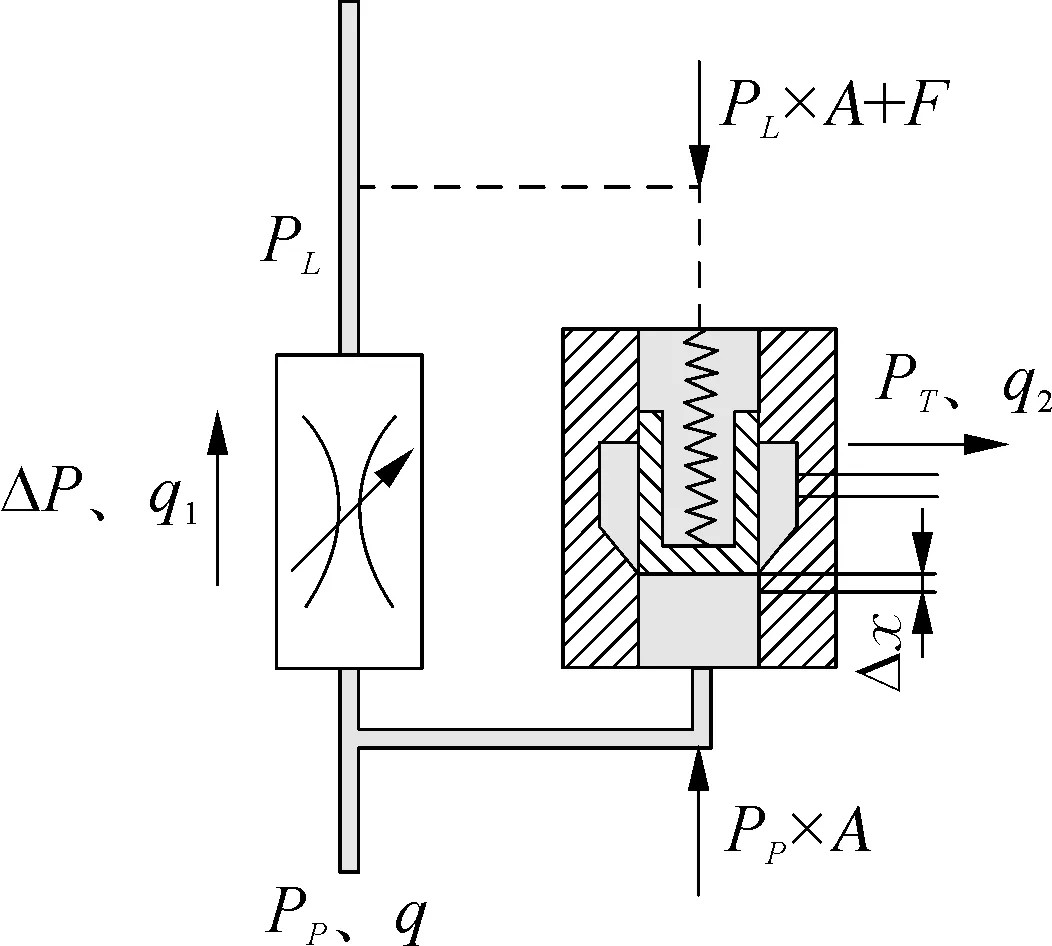
图6 三通压力补偿器的结构图Fig. 6 Principle of the three-way pressure compensator
定差溢流阀的非弹簧腔接入节流阀进油口,弹簧腔接入节流阀的出油口,则阀芯的平衡方程为
PP×A=PL×A+F
(1)
因此节流阀前后压差
(2)
可以得出有用功率
PW=PL×q1
(3)
损失功率
Ploss=ΔP×q1+PT×q2
(4)
式中:PP——泵的出口压力,MPa;
A——弹簧腔的作用面积,m2;
PL——负载压力,MPa;
F——弹簧力,N;
PT—溢流压力;
q1——节流阀出口流量,L/min。
由式(1)、式(2)可以得出,加入定差溢流使得泵的出口压力与负载压力的压差始终为定值。
PVG32-A液压系统如图7所示。

图7 PVG32-A液压系统Fig. 7 PVG32-A hydraulic system1.泵 2.溢流阀 3.定差溢流阀 4.换向阀 5.马达 6.单向阀 7.梭阀
PVG32-A在AMESim软件中搭建仿真模型如图8所示。模型主要元件仿真参数如表4所示。

图8 PVG32-A的AMESim仿真模型Fig. 8 AMESim simulation model of PVG32-A
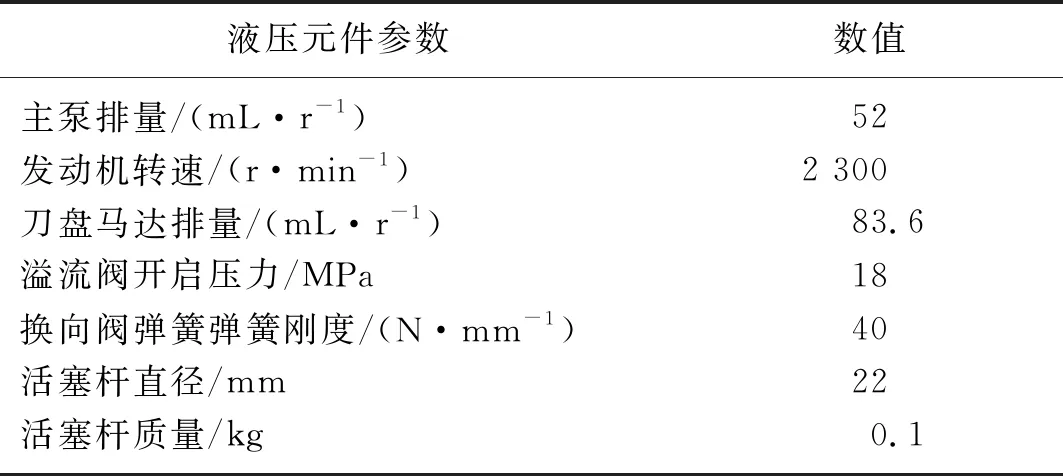
表4 仿真参数Tab. 4 Simulation parameters
通过AMESim软件建立好仿真模型后,各元件的参数根据实际的参数进行编辑,刀盘齿轮箱减速比为2∶1,设置仿真时间为313 s,取样频率100 Hz。
3.3 节流调速系统和PVG32-C系统的建模
切段式的甘蔗联合收割机刀盘子系统目前常用的是传统的节流调速系统,由定量泵、溢流阀、节流阀、马达等元件组成,该系统在AMESim搭建模型搭建完毕后,将试验采集的刀盘载荷谱数据通过AMESim元件库中的动态插值表导入仿真模型。主要操作步骤为:将采集所得数据导入此元件内置的插值表中形成相对应的插值函数,之后模型输入信号可根据此插值函数转换为相对应的载荷加载在仿真模型中。
图9、图10分别为采用节流调速系统的刀盘转速与压力的仿真与现场试验测试对比曲线,根据其跟踪结果来看:无倒伏的工况刀盘转速的平均跟踪误差为0.4%,有倒伏工况其平均跟踪误差为0.2%,可见仿真结果与试验结果的一致性较好,从而验证了仿真模型的正确性。

(a) 无倒伏工况

(b) 有倒伏工况
PVG32-C系统与PVG32-A系统相比,主要区别是不含定差溢流阀,它将LS负载信号直接引入变量泵系统,其AMESim建模见图11。以下通过分析PVG32-C系统与PVG32-A系统性能,进一步对刀盘系统的节能性进行分析。

(a) 无倒伏工况

(b) 有倒伏工况

图11 PVG32-C的AMESim仿真模型Fig. 11 AMESim simulation model of PVG32-C
3.4 无倒伏和有倒伏刀盘子系统性能分析
3.4.1 转速稳定性分析
将节流调速系统、PVG32-A系统及PVG32-C系统进行转速稳定性分析,见表5,其对应的无倒伏和有倒伏工况的转速对比曲线见图12。
通过对比发现:无倒伏工况转速稳定性比较:PVG32-A系统≈PVG32-C系统(优于)>节流调速系统;有倒伏工况稳定性比较:PVG32-A系统≈PVG32-C系统(优于)>节流调速系统。

表5 三种系统中工作部件的转速对比Tab. 5 Speed comparison of working parts in the three systems

(a) 无倒伏工况

(b) 有倒伏工况
通过以上分析可知,在刀盘工作部件的负载波动量较大时,PVG32阀阀前补偿系统的转速稳定性明显优于节流调速系统,对于改善宿根切割质量,为后续物流通道的流畅、平稳工作提供一定的工作条件。
3.4.2 节能性分析
将节流调速系统、PVG32-A系统及PVG32-C系统进行节能性对比分析,见表6,其对应的无倒伏和有倒伏典型工况三种系统的功率对比曲线见图13。
通过对比发现:(1)无倒伏工况系统平均功率情况:节流调速系统>PVG32-A系统>PVG32-C系统,且PVG32-A系统和PVG32-C系统的功率分别比节流调速系统降低54.81%、59.81%。(2)有倒伏工况系统平均功率情况:节流调速系统>PVG32-A系统>PVG32-C系统,且PVG32-A系统和PVG32-C系统的功率分别比节流调速系统降低47.73%、53.8%。

表6 三种系统节能性的分析Tab. 6 Energy saving analysis of three systems

(a) 无倒伏工况

(b) 有倒伏工况
综上分析,节能性:PVG32-C系统(优于)> PVG32-A系统(优于)>节流调速系统。分析原因是PVG32阀阀系统的压力补偿阀发挥了负载匹配作用,使得泵的出口压力始终与负载压力相匹配,相较于节流调速系统降低了压力损失。
4 结论
通过实测获得各工作部件的载荷谱,并将实际载荷导入机电液仿真模型AMESim进行了定量分析,得出如下结论。
1) 有倒伏工况下液压马达负荷变化的幅度比无倒伏工况的大,因此采用节流调速回路时工作部件转速波动范围也较大,由于系统压力需要根据最大负荷值设定,定压调速系统能量损失大,回路效率低。
2) 采用基于PVG的负载敏感阀阀前补偿技术后,有倒伏情况下马达转速波动的幅度可减小到15.38 r/min,转速的稳定有利于保证各执行部件间转速的速比关系,从而提高甘蔗的机械收获质量。
3) 采用基于PVG的负载敏感阀阀前补偿技术,相比较于节流调速系统可获得明显的节能效果,甘蔗无倒伏时采用PVG32-C的系统功率消耗降低最高可达59.81%,采用PVG32-A的系统功率消耗降低最高可达54.81%,但从投入的设备成本来看,后者优于前者,使用者可根据实际情况进行选择。
猜你喜欢
机械工程师(2023年11期)2023-12-09 02:45:30
石油矿场机械(2022年5期)2022-10-25 12:27:02
中国石油石化(2021年8期)2021-03-30 12:39:14
天然气与石油(2020年6期)2021-01-04 07:57:24
今日农业(2019年11期)2019-08-15 00:56:32
山东化工(2019年12期)2019-07-05 08:44:26
隧道建设(中英文)(2017年10期)2017-11-07 07:21:13
创新作文(3-4年级)(2016年5期)2017-05-16 09:07:27
中国卫生(2016年12期)2016-11-23 01:10:08
新农业(2016年19期)2016-08-16 12:00:18
