
无人机遥感在房产测绘中的应用
2021-03-29 04:00胡少辉薛波波王召举
建材与装饰 2021年8期
邢 帅,胡少辉,薛波波,王召举
(中国建筑第七工程局有限公司,河南郑州 450000)
0 引言
目前无人机遥感技术在测绘市场占比逐年增长,其特点作业高效、机动性强、精确程度高、成本低廉得到业内的广泛认可。现阶段,除军事禁区、航空管制区外,超低空飞行很少受到限制,无人机在保证安全的前提下生产成本越来越廉价,在今后的生产生活中有更广阔的发展空间。
1 项目概况和范围
吉利区处于洛阳市的东北部,南边于孟津县紧一黄河相隔,周围分别接壤济源市和焦作孟州市。春季和冬季雨量较少,夏季雨量充沛,属于北温带大陆性气候。本项目位于洛吉快速路和河阳路岔口,总建筑面积约324500m2。
2 具体实施
2.1 测绘基准
坐标系统采用西安80,大比例尺投影采用高斯3°带划分,项目区处于西111°带至东114°带中央子午线正中间位置,平面和高程投影形变量很大,为满足项目需要采用自由坐标系,中央子午线定为112°30 分;平面投影变形小于2.5cm,同时满足城市测量规范。高程采用85 国家高程基准。
2.2 控制测量
规划院提供的GPS 控制点共11 个,因提供的控制点分布不均匀,在此基础上利用GNSS 接收机进行加密控制,10 个控制点参与参数计算,计算类型为四参数+高程拟合,1 个点作为控制检核点;加密过程中GNSS 接收机观测卫星截止角度大于15°,卫星观测总数量共 30 颗。精度系数 PDOP 值 1.4,平面精度HRMS0.0057,垂直精度 VRMS0.009。
2.3 像控点的布设
项目区域为‘L’型,像控点有效的控制整个项目区域。像控点选择明显的地物拐角处,影像大于0.2m,交点良好,便于内业“刺点”。现场刺点选择东地块洗车棚,水厂钢筋棚,西地块围墙等目标点清晰且明显,特别注意阴影处和有弧度的地物不能作为刺点目标。所选像控点在采集过程中,需要考虑周边物体对卫星信号的干扰,保证像控点距离高压线50m 以上,注意周边高大的建筑遮挡或高大灌木等遮挡,远离大功率无线电发射台,附近更无大型水面等易产生多路径效应的影响。保证成果精度满足规范要求,在实施过程中像控点的精度也大于图根点的精度要求,举例图根点的高程和点位中误差如表1 所示。

表1 图根点高程中误差和点位中误差[2]
2.4 航线飞行方向设置
项目区域分四个地块,东地块、社区服务中心、水厂小学在南北轴线上,西地块突出为正方形。使用大疆无人机作为本次航飞工作,该机经济且灵巧,主要应用于低空摄影测量领域。它的特点:高性能成像系统、小巧便捷、操作简单、精度较高具备厘米级导航定位系统。航线以长边南北方位角为航线方向,西地块也以南北方位角为航线方向。航线弯曲度显示在1.5%~3%之间,实际无人机飞行线路与设计航线偏离在像片上小于1cm。像片的倾斜角也不大于2°。航向方向重叠度在60%~65%之间,旁向方向间隔在30%~35%之间。
2.5 像片质量
无人机作业时,光照充足,又避开中午前后2h,无薄雾,霾天气透明良好。良好的设计保证了像片成图的清晰,且能清晰的辨别出地面较小地物的影像。数字化航摄比例尺、成图比例尺和地面采集距离比较合理,满足相关规范要求,三者对应关系如表2所示。成像反差1.1~1.2 比较适中,色彩饱和鲜明,层次感也比较丰富。相邻像片拼接时,没有出现明显的错位、重影现象,影像成果也没有出现偏移且整体特别清晰。影像出现瑕疵,但影像连续出现瑕点数在2 个以下。虽然本次影像成果有一定的瑕疵,下阶段立体模型的拼接并不受影响,不均匀像片变形小于万分之三,满足为下阶段三维建模的使用。
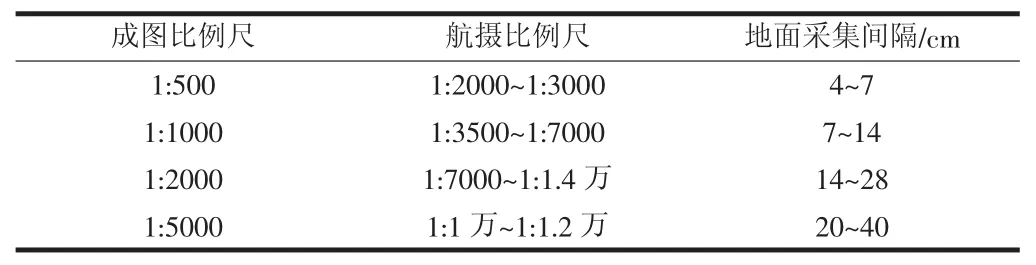
表2 数字化航摄影像对应关系
2.6 影像自动化处理
xtCapture(以下统称为smart3D),作为无人机航空影像的处理软件。smart3D 作为一款实景建模软件,能够通过分析无人机所拍摄的倾斜摄影影像数据,能够快速生成三维模型,直观的反映现实环境用来服务于各种类型的基础设施项目。这些三维模型可应用到项目启动、设计、施工等全生命周期,为管理人员运营决策提供实时、精确的背景。无人机影像导入:打开smart3D 软件,新建工程,选择影像工具模块,添加无人机拍摄的航空倾斜摄影影像,之后选择导入位置,从POS 文件中导入影像位置和角元素。POS 系统分为两部分,第一部分为惯性导航系统(IMU),第二部分GPS 为全球定位系统,也称为IMU/GPS 集成系统。无人机在摄影作业时,可通过POS 系统技术手段,获得曝光瞬时三维坐标三个(x、y、z)和姿态角(φ、ω、K)外方位元素共 6 个,即影像位置和角元素。影像检查:在导入影像完成后,选择3D 视图工具模块,观察导入影像在空间中的位置分布,对视图中偏离航带的影像POS 信息,进行检查和校验,并选择修正POS 信息还是剔除不正确影像。完成影像的剔除后,选择影像工具模块下的检查影像文件,对文件完整性和尺寸进行校验,对异常影像进行修正,确保所有影像能完整加入。
2.7 空间三角测量
空中解析三角测量:在无人机影像导入区块中,首先将空中三角高程测量数据选择提交,之后要注意数据参数的设置,待参数无误提交,下一步将对三角测量数据进行计算,需将smart3D引擎打开,设置无误smart3D 将对三角测量数据自动计算,像控点参与联合平差,待第一次空三完成后,选择测量工具模块,将用GNSS-移动站采集的像控点坐标导入,在影像图片中将测量像控点坐标提前标注,每幅影像图片控制点需三个以上进行刺点,且三幅以上影像图片需同一个控制点。
2.8 DEM 的生成
三维模型的构建:选择新建重建项目,对所需生成的DEM范围及空间参考系统进行选择,提交新的生产项目,选择生产任意格式的三维网格,设定三维模型参数,开始构建三维模型。DSM的构建:三维模型构建完成后,再次提交新的生产项目,选择生产正射影像DSM,DSM 的参数,开始构建数字地表模型DSM。DSM 的 TIFF 影像拼接及 DEM 构建:smart3D 生产出的 DSM 是以TIFF 作为格式的分片式存储,因此需要将TIFF 影像进行拼接。打开ArcGIS 软件,选择镶嵌至新栅格工具,输入DSM 的分片数据,填写参数后,软件将自动进行TIFF 影像的拼接,镶嵌完成后,可以在ArcMap 中预览到拼接的结果,之后在ArcGIS 中对DSM 模型进行高程提取,即可生成DEM。DEM 精度分为一、二、三级,规范中也常用网格点的中误差作为数字高程模型的成果精度,采集点的最大误差不得大于高程中误差的2 倍。如表3 所示。
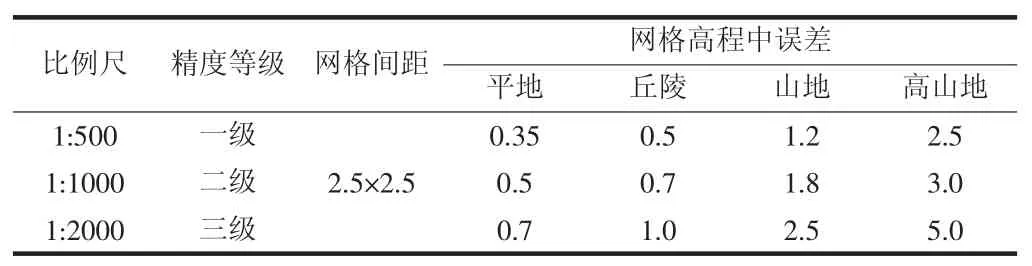
表3 数字高程模型网格点高程中误差[7] 单位:m
3 结语
无人机技术广泛应用于各个领域,前段时间长江流域洪灾,无人机在应急测绘保障中发挥了巨大的作用;十三五提出智慧城市建设,无人机在数字化城市建设中逐步提升保障能力;无人机摄影测量是对传统测量技术的升华和补充,野外数据采集是面向迅速敏捷化、高精度化、自动化一次新的革命。将来的无人机安全性更高、运行花费更小,技术更成熟,期待无人机摄影测量技术为生产生活发挥更大的作用。
猜你喜欢
当代陕西(2020年23期)2021-01-07
现代测绘(2018年3期)2018-09-13
北京航空航天大学学报(2017年4期)2017-11-23
科学与财富(2017年19期)2017-07-19
长江工程职业技术学院学报(2017年2期)2017-06-19
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
