
微型燃气轮机转速控制研究
2021-03-28 11:13杨双成
河南科技 2021年34期
杨双成



摘 要:以现有的基于线性化建立的数学模型为研究背景,从固定时间和滑膜变结构两种控制理论出发,设计一种新的基于固定时间的自适应滑膜控制方法,使其在具备较强鲁棒性的基础上,能符合在初始值任意的前提下短时间内快速使系统恢复稳定。通过Matlab软件进行仿真分析验证了其可靠性,与普通滑膜和时间有限的滑膜进行对比,验证了其有效性。
关键词:微型燃气轮机;固定时间;滑膜控制
中图分类号:TK473 文献标识码:A 文章编号:1003-5168(2021)34-00-04
Research on Speed Control of Micro Gas Turbine
YANG Shuangcheng
(School of Naval Architecture Ocean and Energy Power Engineering, Wuhan University of Technology, Wuhan Hubei 430000)
Abstract: Taking the existing mathematical model based on linearization as the research background, starting from the two control theories of fixed time and synovial variable structure, a new adaptive synovial control method based on fixed time is designed. On the basis of strong robustness, it can also make the system stable in a short time under the premise of arbitrary initial value. The simulation analysis is carried out by Matlab software to verify its reliability, and it is compared with ordinary synovial membrane and time-limited synovial membrane to verify its effectiveness.
Keywords: micro gas turbine;fixed time;sliding film control
全球能源环境越来越严峻,为替代传统化石能源,人们开始将目光转向分布式能源。以效率高、投入少及多样化等优势,微型燃气轮机逐渐走进人们的视野。当前,微型燃气轮机有较多相近的控制理论,如MARIA等人从负荷角度出发减少所需消耗的燃油[1],MURRAY等人验证了迭代控制的稳定性等[2],潘蕾等人基于Deutaz T2016燃气轮机分析了相关的非线性状态空間方程[3]。众多关于微燃机的研究夯实了相关的理论基础,但因为燃气轮机结构复杂,始终难以在转速控制方面保证效果,因此对转速控制方法开展相关研究。
1 微型燃气轮机
1.1 结构
微型燃气轮机一般由压气机、涡轮、发电机、回热器及燃烧室组成。发电机被不断旋转的透平带动,使其从热能转变为机械能[4]。
1.1.1 压气机。一般情况下,压气机的压比在3.5左右。燃气轮机中的压气机共有离心式、轴流式及混合式3种类型。离心式有最成熟的制作工艺,抵抗气流变化的能力较强,但建模较为复杂,研究时较为不便,因此现有成果较少。轴流式有较大的总压比,能进行多次转化。混合式集合了两者的优点,可大大提升压缩效率。
1.1.2 燃烧室。燃烧燃料的地方即燃烧室,通过燃烧燃料可以使其产生热能以开展下一环节的工作。燃烧室设置有点火装置以点燃燃料。在火焰筒中,将气体点燃后可提供足够的热量使转子转动。为降低所排放的污染物,需采用催化技术降低氮氧化物的排放。
1.1.3 涡轮。涡轮是将流体介质各种能量转变为机械能的设备。燃烧室所提供的热能进到涡轮时会增加气体流速,动叶随着不断降低的气体温度和压强会被推动旋转,使化学能转化为机械能[5]。
1.1.4 发电机。燃气轮机有着较快的转速,所以多选用永磁同步电机。它是整个系统不可缺少的发电装置[6]。
1.2 运行原理
微型燃气轮机具有两种结构,分别是单轴结构和分轴结构。单轴结构燃气轮机的涡轮和发电机转子装在同一轴[7],维护较为方便,且有着更高的安全性和可靠性,转速也较快,结构如图1所示。分轴结构是采用变速装置改变涡轮转速后再与发电机相连,结构较为复杂,有着较高的维护频率,现已很少使用。
单轴燃气轮机是当前最常见的类型。室外空气被压气机吸入后压缩,再通过回热器对空气进行加热以增加其内能,而后送进燃烧室与燃料混合,并在燃烧室内燃烧混合气体,通过增加其热能的方式增加气体能量,而膨胀后的气体使涡轮得到旋转动力做功。虽然气体膨胀后的内能有所减小,但因为依然存在相关问题,需将该气体送回回热器中以加热后进的低温气体[8]。多数情况下,发电机能够被涡轮带动着一起进行旋转,将机械能转化为电能。但是,燃气轮机有着较高的转速,导致发电机产生频率较高的电能无法直接使用[9],需通过相应的电子器具将其转变为工频交流电使用。
2 固定时间滑膜控制器的设计
Emelyanov在20世纪50年代提出滑膜变结构控制方法。基于前人的研究成果,结合滑膜变结构控制系统参数不敏感和时间固定的特点,提出基于时间固定条件下的滑模控制方法,在保障鲁棒性较强和不限制初始值的基础上,使系统在有限时间内有效收敛到稳定。将回热器模型[10]简化为如下表达形式:
式中:P为涡轮入口压强,Pa;T为回热器金属壁平均温度,K;n为系统转速,r/s;f(x)为x变量的光滑连续函数;b=1.880 8×10;u为系统输入变量。
在系统中加入时间固定时的稳定性要求,进一步提升系统鲁棒性,则系统收敛时间上限的计算方式为:
式中:0<α<1;β>1。
据此可以得到,無论是何初始值,微型燃气机系统在t>T时必然可以保持稳定。因为所涉及的系统中包含滑模面的两个幂次项,所以即便系统参数有所改变,也能确保在滑膜面周围实现系统变量的快速收敛,大大提升了系统的鲁棒性。
3 数值仿真分析
3.1 系统有效性
使用Matlab有限元分析软件模拟分析设计的控制器,验证其有效性。本次仿真以C30型号燃气轮机为背景,具体参数为ξ=15,g=25(ξ、g均为一正常数)。在1 600 r/s的额定转速下,保持空载时在系统中添加进控制器,负载在运行1.5 s后加入。如图2所示,根据模拟结果可知,在系统中添加控制器后,它在任意初始值下均能在短时间内保持稳定,且即使系统在加入负载使其原有参数有所变化时,所改变的系统参数也能短时间内保持稳定,证明所设计的控制器具有可行性。
从模拟结果可以看出,不同控制器作用下,系统转速均能在一定时间内保持稳定,且在1.5 s负载加入时会在出现些许波动后重新回归到稳定状态。从曲线变化过程可以看到,系统最先保持稳定的是固定时间的滑膜控制器,其次是时间限定时的滑膜,最后是普通滑膜。添加了固定时间滑膜器的系统在负载加入后有最小的波动范围和最短的稳定时间,相比之下,其余两种控制器有着更大的波动范围和更长的恢复时间。
将所设计滑模控制器与普通滑膜控制器和时间限定条件下的滑膜控制器进行对比分析,以探讨不同控制器的效能。
普通滑膜控制律为:
式中:P为系统输出功率;x表示目标指令信号;S表示设计滑模面。
有限时间滑膜控制律为:
式中:k为自适应参数。
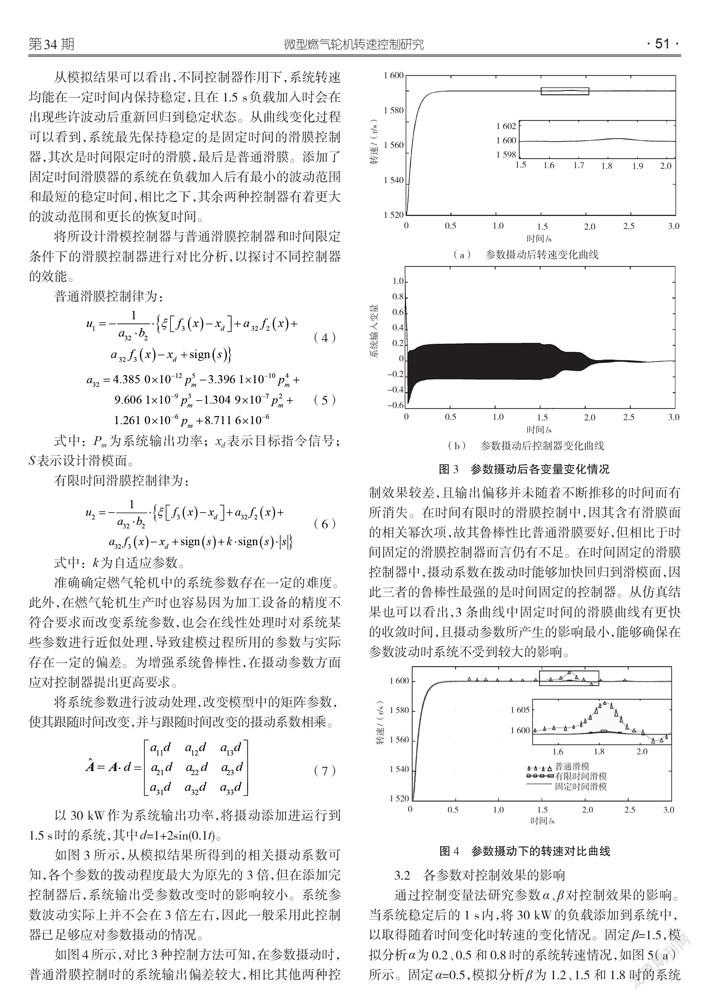
准确确定燃气轮机中的系统参数存在一定的难度。此外,在燃气轮机生产时也容易因为加工设备的精度不符合要求而改变系统参数,也会在线性处理时对系统某些参数进行近似处理,导致建模过程所用的参数与实际存在一定的偏差。为增强系统鲁棒性,在摄动参数方面应对控制器提出更高要求。
将系统参数进行波动处理,改变模型中的矩阵参数,使其跟随时间改变,并与跟随时间改变的摄动系数相乘。
以30 kW作为系统输出功率,将摄动添加进运行到1.5 s时的系统,其中d=1+2sin(0.1t)。
如图3所示,从模拟结果所得到的相关摄动系数可知,各个参数的拨动程度最大为原先的3倍,但在添加完控制器后,系统输出受参数改变时的影响较小。系统参数波动实际上并不会在3倍左右,因此一般采用此控制器已足够应对参数摄动的情况。
如图4所示,对比3种控制方法可知,在参数摄动时,普通滑膜控制时的系统输出偏差较大,相比其他两种控制效果较差,且输出偏移并未随着不断推移的时间而有所消失。在时间有限时的滑膜控制中,因其含有滑膜面的相关幂次项,故其鲁棒性比普通滑膜要好,但相比于时间固定的滑膜控制器而言仍有不足。在时间固定的滑膜控制器中,摄动系数在拨动时能够加快回归到滑模面,因此三者的鲁棒性最强的是时间固定的控制器。从仿真结果也可以看出,3条曲线中固定时间的滑膜曲线有更快的收敛时间,且摄动参数所产生的影响最小,能够确保在参数波动时系统不受到较大的影响。
3.2 各参数对控制效果的影响
通过控制变量法研究参数α、β对控制效果的影响。当系统稳定后的1 s内,将30 kW的负载添加到系统中,以取得随着时间变化时转速的变化情况。固定β=1.5,模拟分析α为0.2、0.5和0.8时的系统转速情况,如图5(a)所示。固定α=0.5,模拟分析β为1.2、1.5和1.8时的系统转速,如图5(b)所示。
从图5(a)可以看出,系统转速在α=0.5时,在负载加入后仅有较小的变化量。对于系统的动态性能而言,偏大或者偏小的α值都会对其造成一定的影响。从图5(b)可以看出,系统转速随着不断增加的β值所受负载的影响也在变大,系统转速在β=1.8有最小的动态效应,系统转速在β=1.2或β=1.5时因为负载的加入波动情况较显著。
4 结语
基于滑膜控制的相关理论研究固定时间的滑膜控制方法,通过相应的数值仿真分析,以及与普通滑膜和时间有限的滑膜控制对比可知,燃气轮机系统采用该控制器能够使其在任意初始值下快速收敛达到稳定状态,其鲁棒性是3种控制方法中最强的,符合预期的设计要求。
参考文献:
[1]CAMERETTI M C.An optimal control strategy for high-speed micro gas turbine permanent-magnet synchronous generator[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion IEEE,2018.
[2]VRABIE D,LEWIS F.Neural network approach to continuous-time direct adaptive optimal control for partially unknown nonlinear systems[J].Neural Networks,2009(3):237-246.
[3]潘蕾,杨瑜文,林中达.重型单轴燃气轮机-发电机组的综合动力学建模方法的研究[J].动力工程,2002(5):1959-1964.
[4]徐之平,卢玫,李凌,等.微型燃气轮机回热器[J].动力工程,2003(6):2752-2760.
[5]左志涛,孙志刚,朱阳历,等.简单循环与回热循环燃气轮机变工况特性[J].航空动力学报,2013(2):121-129.
[6]孙虎.瓦斯发电系统模块建模与仿真研究[D].徐州:中国矿业大学,2014:18.
[7]秦旷宇.基于微网并网运行的微型燃气轮机系统稳定性仿真[D].天津:天津大学,2010:34.
[8]谭雪琴.燃气轮机的鲁棒自适应控制设计及仿真验证[D].重庆:重庆大学,2017:21.
[9]杨秀,臧海洋,靳希.微型燃气轮机并网发电系统的仿真分析[J].华东电力,2011(5):818-821.
[10]段建东,赵克,吴凤江,等.回热循环微型燃气轮机非线性数学模型[J].航空动力学报,2014(1):199-206.
