一种老人助行器的设计与分析
2021-03-28 21:21李宏涛
河南科技 2021年32期
李宏涛



摘 要:人口老龄化现象日益加重,为帮助身体机能有所退化的老年人取得更好的出行体验,设计了一种可实现减重功能的老人外出助行器。通过该助行器升降、折叠、支撑等机构的配合,实现了电动轮椅模式与减重助行模式间的自由切换,并对关键承重结构进行了有限元分析校核,确保了助行器结构的稳定性和安全性。
关键词:老年人;出行;助行器;有限元分析
中图分类号:TB472 文献标识码:A 文章编号:1003-5168(2021)32-0051-03
The Design and Implementation of a Walker for the Elderly
LI Hongtao
(School of Mechanical Engineering, Anhui University of Technology, Huainan Anhui 232000)
Abstract: The aging phenomenon of the population is increasing. In order to help the elderly with degraded physical function and achieve a better travel experience, an auxiliary elderly aid is designed that can realize the weight loss function to go out.Through the cooperation of the walker lifting, folding and support institutions, the free switch between the electric wheelchair mode and the weight loss support mode is realized and carried out the finite element analysis and check of the key load-bearing structure and ensure the stability and safety requirements of the walker structure.
Keywords: the elderly;going out;walker;finite element analysis
根據我国第七次全国人口普查结果,我国60岁及以上人口达到了2.64亿,占总人口的18.7%;65岁及以上人口达到1.9亿,占总人口的13.5%。国家统计局局长表示,人口老龄化是社会发展的重要趋势,也是今后我国较长一段时间的基本国情[1]。
调查发现,老人助行器产品虽然种类繁多,但大多功能单一,集成度不足,难以满足老人的全部出行需要[2]。针对这一现象,设计了一款带有减重功能的智能助行器,不仅能够当成普通电动轮椅使用,还能够帮助老人站立行走,锻炼腿部肌肉,很好地完善了助行器的功能。
1 多功能助行器的结构设计
1.1 老人助行器的功能需求分析
为确定老人助行器的功能,在网络上查阅了部分国内外关于老人助行器的研究文献,并浏览了国内主要电商平台。经过总结分析,针对身体机能开始退化的老人,设计了一款具有多种功能的老人助行器。老人助行器的功能需求如下:①普通电动轮椅功能,可以满足老人长时间和长距离的出行需要,是助行器的基础功能;②辅助站立功能,由于腿部肌肉的退化,老人常需要他人的帮助才能够起身站立,而辅助站立功能可帮助老人独立完成起坐;③减重站立助行功能,可帮助老人减重站立行走,从而达到一定的康复锻炼效果。通过对老人助行器的功能需求进行分析,从使用者的安全性需求和心理需求出发,设计出一款可辅助减重的老人助行器,以改善老人的生活质量。
1.2 方案设计
通过调查研究,减重助行设备的减重方案主要有3种,分别是悬吊式减重机构、外骨骼式减重机构及支撑式减重机构。悬吊式减重机构可以最大限度地减轻使用者腿部压力,但一般设备尺寸比较庞大,出行灵活性不高;外骨骼式减重机构体积小巧,灵活性好,但价格昂贵,且对控制系统要求较高,无法保证绝对安全性;支撑式减重机构相对前两者,成本较低,体积适中,安全性好,操作使用简单,且主要面向腿部功能开始有所退化的老人设计。因此,充分考虑到设备使用时的安全性、稳定性及舒适性后,选择支撑式减重机构。
1.3 总体结构设计
该助行器主要由4大机构组成,分别是底盘机构、升降机构、座椅折叠机构和支撑架机构,如图1所示。升降结构通过轴承和杆件与底盘机构配合连接,支撑架机构和座椅折叠机构通过螺栓与升降架机构固定配合连接。在进行结构设计时,还应该满足以下设计原则:①从人机工程学的角度出发,助行器外形和轮廓尺寸应保证老人的使用体验,提高舒适性和安全性;②零件材料的刚度和疲劳极限等应有一定的安全系数,保证复杂工况下使用者的安全;③零件结构的设计便于生产和调试;④在保证产品所需的安全情况下,尽可能减轻产品质量,使助行器轻量化;⑤确保各机构运行中的稳定配合,不会发生运动干涉。
1.4 升降结构设计
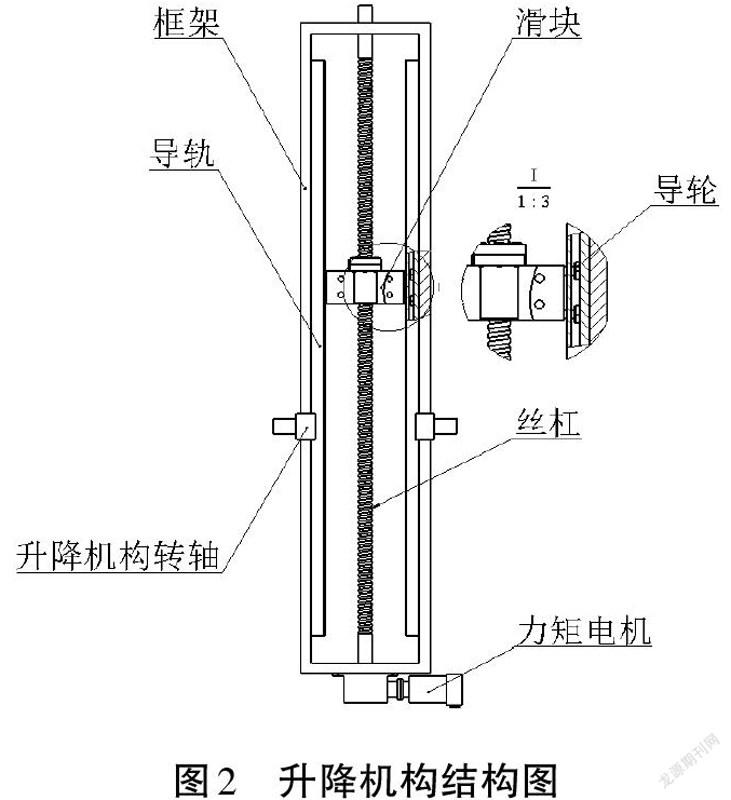
为了提高产品升降过程稳定性及减小产品尺寸,本助行器的升降结构选择使用滚珠丝杠传动方案[3]。如图2所示,升降结构主要由力矩电机、升降机构、转轴、丝杠、滑块、导轨框架和导轮组成。升降机构通过升降机构转轴与底盘连接,丝杠安装在升降机构框架内,框架内置导轨,滚珠丝杠的滑块上安装4个导轮,升降过程中导轮在导轨内运动。力矩电机安装在框架下端,通过减速器与丝杠下端相连,并使用推力球轴承承受丝杠轴向力。电机带动丝杠转动,使滑块升降,完成升降过程。升降机构选择滚珠丝杠作为传动方案,滚珠丝杠传动副具有高效率、长寿命、精度高以及体积小等优点,可以增加升降机构的稳定性和高效性[4]。
1.5 座椅折叠机构设计
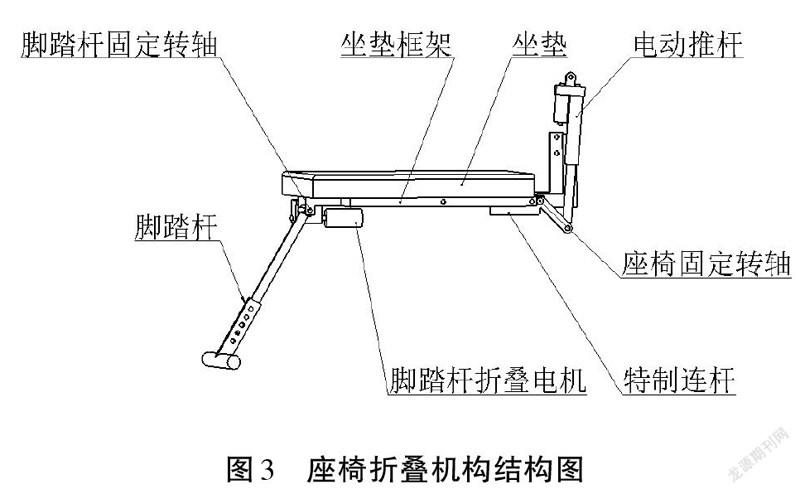
座椅折叠机构主要由电动推杆、特制连杆、座椅转轴、坐垫框架、坐垫、脚踏杆折叠电机以及脚踏杆和脚踏杆转轴组成,如图3所示。坐垫安装在坐垫框架上,坐垫框架通过座椅转轴与升降机构滑块连接。电动推杆一端连接滑块,一端连接特制连杆。特制连杆与坐垫框架固定连接,电动推杆伸缩带动特制连杆绕坐垫转轴转动,从而带动坐垫框架绕座椅转轴转动。脚踏杆折叠电机与脚踏杆通过脚踏杆转轴与坐垫框架连接,脚踏杆电机转动带动脚踏杆绕脚踏杆轴转动。本设计方案相对于传统的座椅翻转机构,优点是不需要将支撑和翻转机构设计在座椅板下方,而是设在座椅板后方,可实现座椅折叠机构随升降机构滑块完成升降,同时节约了助行器空间,有助于产品轻量化。
2 助行器主要功能原理
本助行器的主要功能是减重助行。如图4所示,设计的独特之处在于通过多种机构的相互配合,实现老人从坐到走的姿态的平稳转变。助行器完成减重助行功能时分为两个过程。第一过程是老人以坐姿坐在椅子上,通过按下控制面板上的减重助行按钮,对助行器发出指令。第二过程中,坐垫下方电机转动带动脚踏板匀速折叠至座椅下方,然后升降结构下方力矩電机转动带动丝杠转动。丝杠滑块与支撑架和坐垫折叠机构相互连接,滑块上升,从而使支撑架和坐垫缓慢上升至预先设定的工作高度。最后助行器左侧电动推杆缓慢收缩,带动特制连杆绕坐垫轴转动,特制连杆带动坐垫缓慢向下展开至与靠背平行状态。此时,老人完成从坐姿向站姿的转变,同时助行器支撑架通过对老人腋下支撑达到减重及固定效果。老人可通过控制器上的微调按钮,调节滑块高度来改变减重比例,以适应自身状况,取得更好的出行和锻炼体验。
3 有限元分析
升降机构的框架是助行器的重要支撑件,在任何模式或位姿下都要承受一定的径向力。为了避免丝杠承受径向力而引起变形,导致滑块无法正常滑动,必须保证框架的刚度及稳定性,因此有必要对升降机构的框架进行有限元分析[5]。在减重助行模式下,升降机构框架需要承受全部减重量,且框架受力位置与支点较远,容易产生形变,因此选择此模式姿态对升降机构框架进行静力学分析。
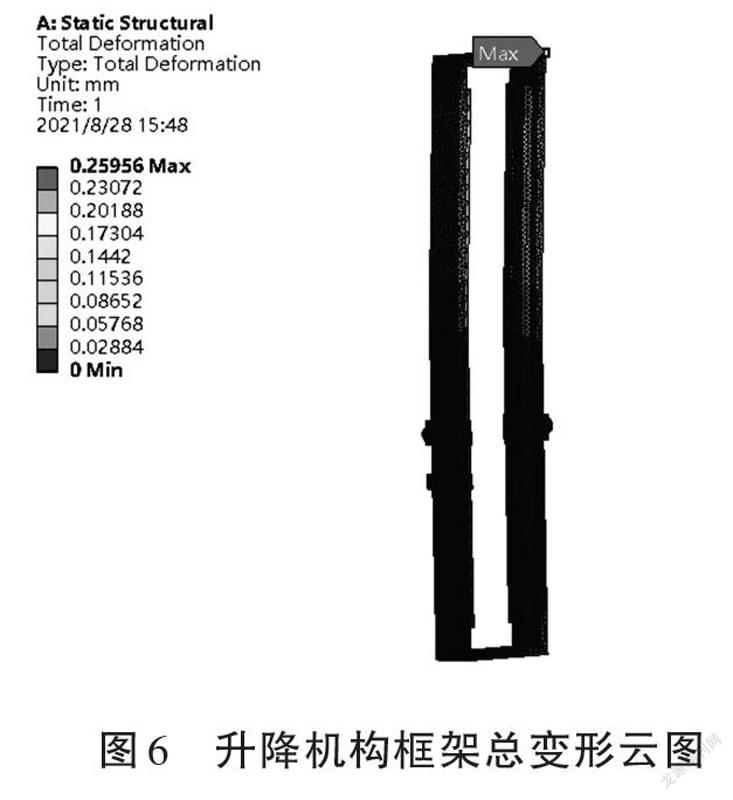
首先,构建三维模型,使用三维制图软件画好外框架、内置导轨及支撑架,支撑架与滑块、滑块上的导轮与框架都简化为固定配合连接。其次,将相关信息导入有限元分析软件,定义零件模型添材料为Q235。Q235是屈服值为235 MPa、密度为7.85 g/cm3、杨氏模量为210 GPa的碳素结构钢,具有良好的刚度和焊接性。在框架与底盘连接的转轴处添加固定约束,在支撑架的左右支撑柱处各添加500 N的竖直压力。最后,对框架进行网格划分,网格大小设置为10 mm,划分为78 066个单元,141 164个网格。进行静力学分析,得到等效应力云图和总变形云图,如图5和图6所示。对升降机构框架的等效应力云图进行分析,可得到最大等效应力发生在滑块与导轨接触处,约为36.96 MPa;对升降机构框架在总变形云图进行分析,可得到最大变形发生在框架顶部,位移量约为0.26 mm。有限元仿真结果显示最大等效应力小于材料最大屈服极限,最大变形量满足滚珠丝杠机构的精度要求。
4 结语
本助行器选择采用滚珠丝杠传动机构,较好地提升了助行器工作时的效率和平稳性。通过多种机构的相互配合,达到了减重助行的设计要求。通过有限元仿真,对主要承重机构进行静力学分析,确保助行器安全稳定。本设计最终实现了设计者的初衷,对提升老人出行体验及出行方式多样性有很大帮助,同时通过减重比例的调节,达到了对老人腿部肌肉的锻炼效果。
参考文献:
[1]国家统计局,国务院第七次全国人口普查领导小组办公室.第七次全国人口普查公报(第五号):人口年龄构成情况[J].中国统计,2021(5):10-11.
[2]李璐岑.基于老龄人的助行器设计现状及建议分析[J].南方农机,2020(1):135-145.
[3]范良勇.滚珠丝杠结构家用电梯研发及应用[J].河南科技,2020(11):30-31.
[4]许向荣,宋现春,姜洪奎,等.单螺母滚珠丝杠副轴向刚度的分析研究[J].武汉理工大学学报,2009(24):54-57.
[5]郑福建,常影,赵玉山,等.基于ANSYS Workbench的下肢康复机器人的有限元分析[J].河北农机,2020(1):43-45.
猜你喜欢
工业设计(2022年9期)2022-10-13
当代陕西(2022年6期)2022-04-19
保健与生活(2022年8期)2022-04-08
保健与生活(2022年7期)2022-04-08
演艺科技(2016年11期)2016-12-24
百科知识(2016年23期)2016-12-24
文艺生活·中旬刊(2016年11期)2016-12-13
航空兵器(2016年4期)2016-11-28
科学与财富(2016年15期)2016-11-24
科技视界(2016年18期)2016-11-03