次级断续时直线感应牵引电机的等效电路
2021-03-25 00:12:46罗志昆
电工技术学报 2021年6期
吕 刚 罗志昆
次级断续时直线感应牵引电机的等效电路
吕 刚 罗志昆
(北京交通大学电气工程学院 北京 100044)
直线感应电机作为轨道交通车辆的牵引电机,在道岔、转弯等路段会出现次级感应板缺失的情况,次级连续时的等效电路不再适用。针对此特殊工况,提出一种基于气隙磁通密度的分布模型,考虑次级断续的等效电路。首先,建立直线感应电机次级断续时的分析模型,根据初、次级耦合情况把断续工况分成三个阶段。然后,利用线性近似化法修正随耦合区域长度变化的初级漏感、励磁电感等参数。结合气隙磁通密度分布模型与次级断续工况,考虑纵向端部效应的影响,修正励磁支路上的励磁电感和表征端部效应涡流损耗的等效电阻,推导出三个阶段的等效电路来表示初级通过次级感应板断续区域这一动态过程。最后,根据等效电路求出电机推力和效率的动态变化曲线,并与实验台的测量结果对比,验证了所提等效电路的正确性。
直线感应电机 次级断续 等效电路 纵向端部效应 气隙磁通密度
0 引言
单边短初级直线感应电机在交通系统中的运用主要有直线轮轨交通和磁悬浮交通两种方式。直线轮轨交通的优势是爬坡、转弯路段通过性强,线路规划灵活,拆迁成本低,隧道截面小,建设成本低;磁悬浮交通的优势则为静音、舒适、速度快[1-3]。目前由中车集团研制的时速600km磁悬浮试验车于同济大学试验线上成功试跑。直线电机牵引系统克服了传统轨道交通方式依靠轮轨之间黏着牵引的限制,有望极大地提高陆地交通工具的速度上限。随着人类对于交通工具速度要求的不断提高,以及电力电子技术和计算机控制技术的进步,直线电机将会在轨道交通中得到越来越广泛的应用[4-6]。
在轨道交通系统中,直线感应牵引电机的初级安装在列车上,次级板沿轨道铺设。当初级绕组中通入对称的三相交流电时,列车在电磁推力的牵引下做直线运动。为了保证运行过程中初、次级不发生碰撞,直线电机的气隙一般较大,从而导致功率因数和能量传递效率较低;同时,由于初级开断造成的端部效应和法向力的存在,使直线感应电机的运行性能进一步恶化。
为提高电机运行效率、减少能量损失,国内外学者提出了许多高性能的优化控制策略[7-8]。一种思路是根据电机的等效电路得到损耗的数学模型,推导出损耗最小时励磁磁通的表达式。文献[9]综合考虑了直线地铁车辆运行时电机和逆变器的损耗,推导出总损耗最小时的励磁磁通。文献[10]根据电机数学模型推导出推力、铜耗和法向力的表达式,结合最优化理论考虑在推力满足要求的条件下,电机铜耗和法向力造成的损耗之和最小。以上两种控制策略均需要准确的数学模型,一个精确的等效电路至关重要,因此直线感应电机的等效电路一直是研究热点。
上述对于直线感应电机等效电路的研究已经相当成熟,但研究对象都是次级连续工况下的电机。由于工程实际的限制,直线感应电机的次级感应板在道岔、转弯和列车进出库等路段不能连续铺设,次级感应板不连续路段如图1所示,此时会造成电机初级绕组中频繁过电流,导致保护系统误动作和牵引传动系统的IGBT器件损坏。同时推力和法向力的突变导致列车轮对的不规则磨损,严重影响列车的安全稳定运行。目前对次级断续时的相关研究较少,文献[17]提出一种列车运行过程中直线感应电机互感在线辨识的算法,判断列车是否进入次级断续区域,并调整电机dq轴电流的指令值,来抑制初级电流和推力的突变,但使用的仍是基于次级连续工况的等效电路。初级通过次级断续区域时,初、次级的电阻和漏感等参数会发生变化,导致次级时间常数发生变化,因此次级断续时传统针对次级连续的稳态电路不再适用。

图1 次级感应板不连续路段
针对上述问题,本文提出了一种基于气隙磁通密度模型的次级断续时直线感应电机的等效电路。首先建立了次级断续时直线感应牵引电机的分析模型,将初级通过次级断续区域的过程分成三个阶段。其次,使用线性近似化法修正次级断续时初级漏感、次级电阻、次级漏感和励磁电感等参数。然后根据次级断续时气隙磁通密度和去磁电流的分布,修正了励磁支路的电感和电阻。最后在此基础上,用三个阶段的等效电路表示初级通过断续区域的动态过程,并得到推力和效率的变化曲线,通过与实验台测量结果对比,验证了等效电路的正确性。
1 次级断续时直线感应电机的分析模型
次级断续时直线感应牵引电机的分析模型如图2所示。图2a是直线感应电机运行的起始位置,初级长度为p,次级断续区域的长度为s,起始时刻初级入口端与断续区域距离为c,笛卡尔坐标系的轴正方向与初级运动方向一致,轴正方向垂直于次级板向上,原点位于起始时刻初级的入口端,且坐标系固定不动。初级先后经过次级板1、次级缺失区域和次级板2,如图2b所示。根据轨道交通中次级板实际的铺设情况,设置初级长度大于缺失区域的长度。
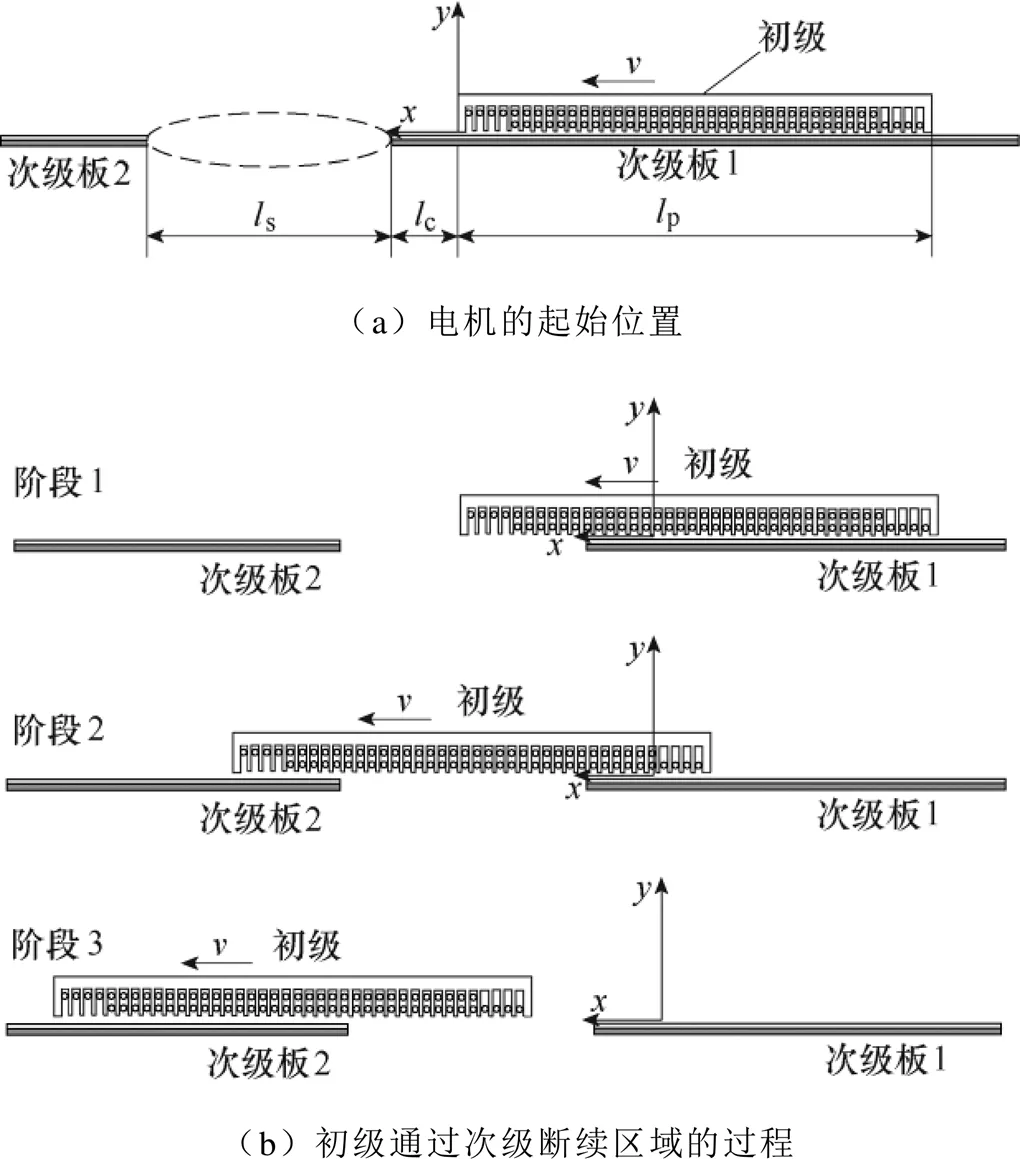
图2 次级断续时直线感应电机的分析模型
为了简化等效电路参数的求解过程,合理地做出以下假设:
(1)断续区域的气隙磁通密度不影响初、次级耦合区域的磁通密度分布。
(2)初级通过次级断续区域时,速度保持恒定,因为直线感应电机牵引的列车惯性很大。
(3)忽略铁磁材料的饱和。
(4)初级绕组的三相电流保持对称。
次级的缺失会对气隙磁场和次级电流的分布产生很大的影响,从而导致推力、次级涡流损耗、气隙传递的无功功率等物理量发生变化,对电机的运行情况产生较大的影响。综合考虑耦合区域的长度变化和纵向端部效应的影响,把初级通过断续区域的过程分成三个阶段:阶段1,初级仅与次级板1耦合;阶段2,初级与次级板1、2同时耦合;阶段3,初级仅与次级板2耦合。
2 次级断续时的等效电路
2.1 考虑转差率的新型气隙磁通密度分布模型
在直线感应电机中,初级长度有限并不断与新的次级区域耦合,气隙磁场会产生畸变。根据楞次定律,初级入口端的感应涡流会削弱气隙磁场,出口端的气隙磁场则会被加强,初级电流和次级感应涡流共同决定了气隙磁场的分布,这种由于初级不断进入新的次级区域导致的气隙磁场畸变称为动态纵向端部效应,其示意图如图3所示。气隙磁场和次级去磁涡流作用产生的电磁力始终阻止初级进入新的次级区域,纵向端部效应会对电机的运行状况产生较大影响,而且速度越大,影响越明显。本文根据纵向气隙磁通密度和次级去磁涡流的分布,在传统的T型等效电路上根据运行速度,动态修正并联支路上的电感和电阻,来考虑纵向端部效应的影响。
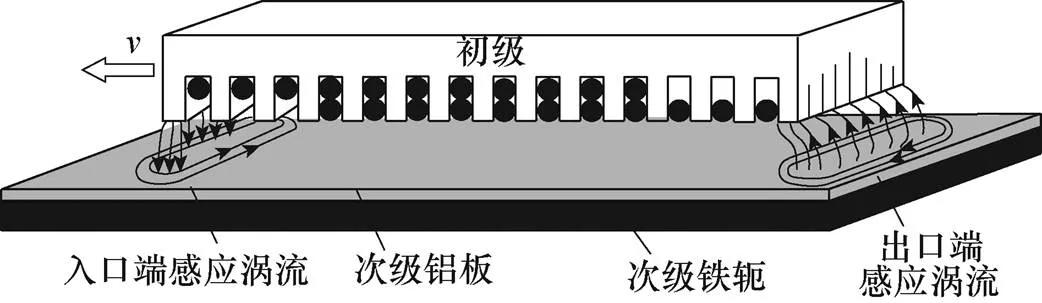
图3 纵向端部效应示意图
J. Duncan提出用e指数函数拟合纵向气隙磁通密度的分布(简称Duncan模型)[15],如图4a所示,21、22、23为不同的次级运动速度。为了表示不同速度下纵向气隙磁通密度和次级去磁涡流的分布情况,/2,2为次级时间常数,2=(m2)/2,m、2和2分别为励磁电感、次级漏感和次级电阻。当初级运动速度为时,初级在次级上方前进一个自身长度所需时间T=/,定义一个无量纲的参数为
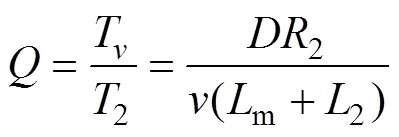
式中,为时间域上电机长度的标幺值,速度越大,电机的标幺长度则越小;反之,则越大。当速度为零时,电机长度趋近于无穷大,纵向端部效应不发生。
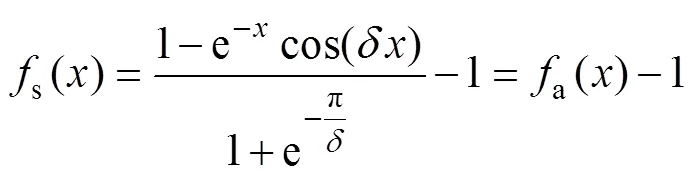
图4b为纵向气隙磁通密度分布的有限元计算结果,Duncan模型仅考虑了速度对磁通密度分布的影响,然而不同转差率下磁通密度分布情况相差较大,Duncan模型仅在转差率较小时比较准确,无法适用于直线感应电机运行的全部工况。为了考虑转差率的影响并提高等效电路模型的计算精度,使用一种与转差率有关的函数来模拟不同工况下的纵向气隙磁通密度分布(简称新型磁通密度分布模 型)[16],定义为
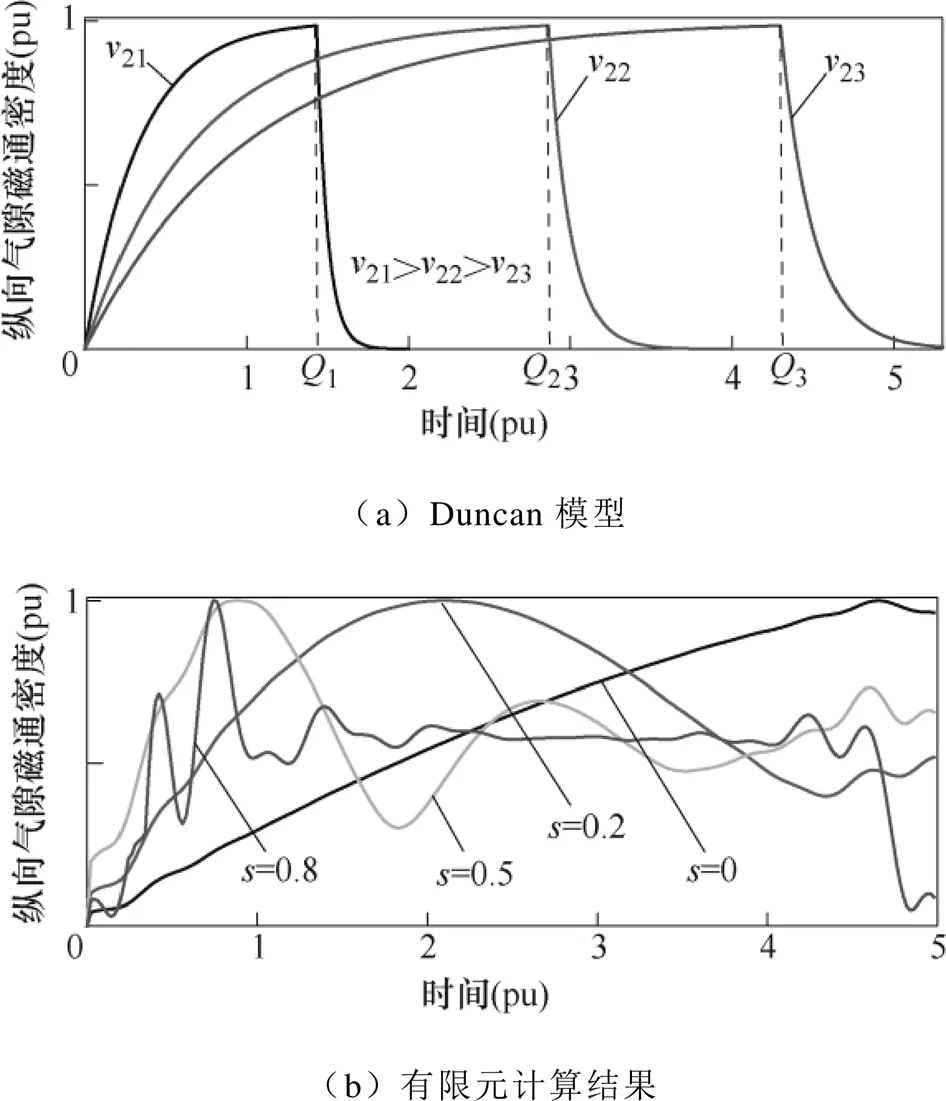
图4 纵向气隙磁通密度的分布情况
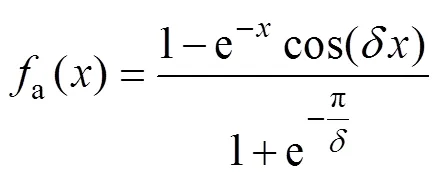
初级供电频率一定时,不同转差率下纵向气隙磁通密度和次级去磁涡流的分布模型如图5所示。气隙磁场在初级入口端迅速增强,到达高位后振荡趋向于稳定,相比于Duncan模型,新型磁通密度分布模型更接近于有限元计算结果,说明新型磁通密度模型更接近于实际情况,能反映不同频率、不同转差率下各种运行工况的磁场分布。
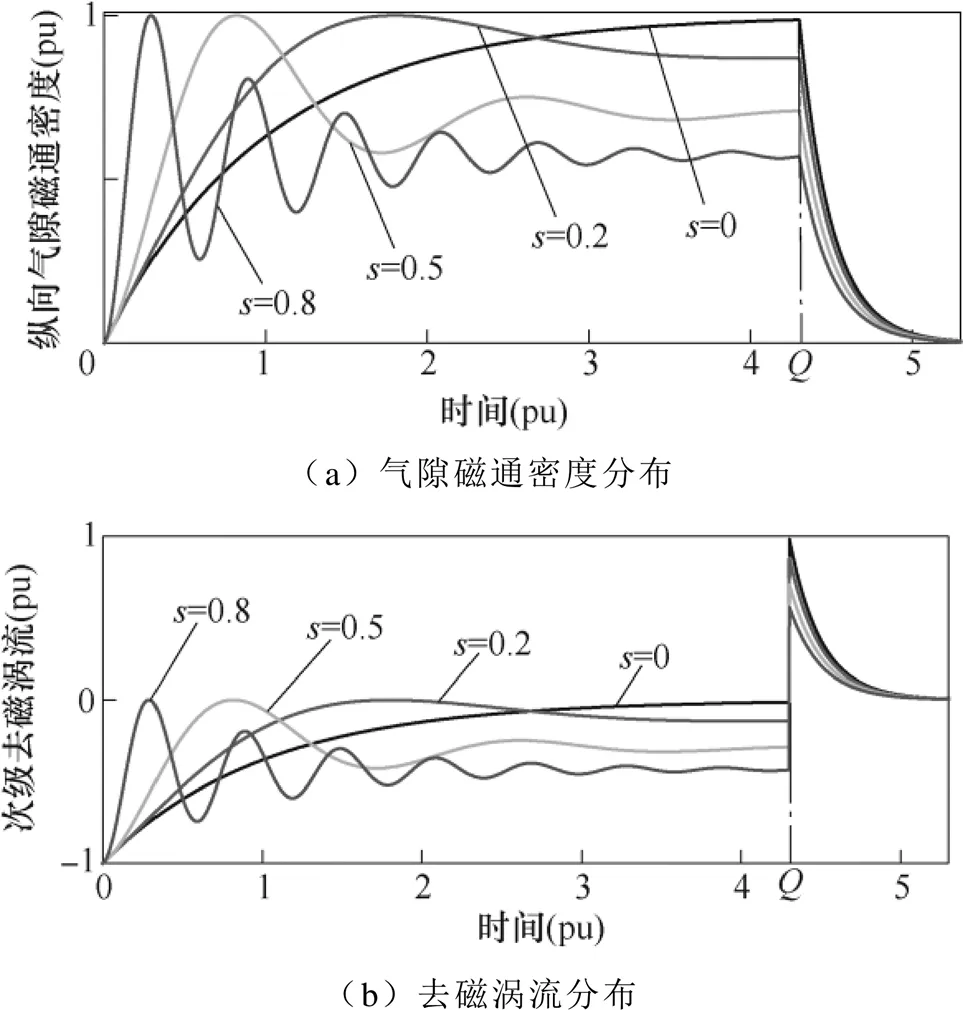
图5 气隙磁通密度、去磁涡流分布模型
2.2 次级断续时的等效电路

2.2.1 初级漏感等参数的修正
为了降低分析的复杂程度,使用线性近似化法来修正与耦合区域面积有关的等效电路参数,表达式为
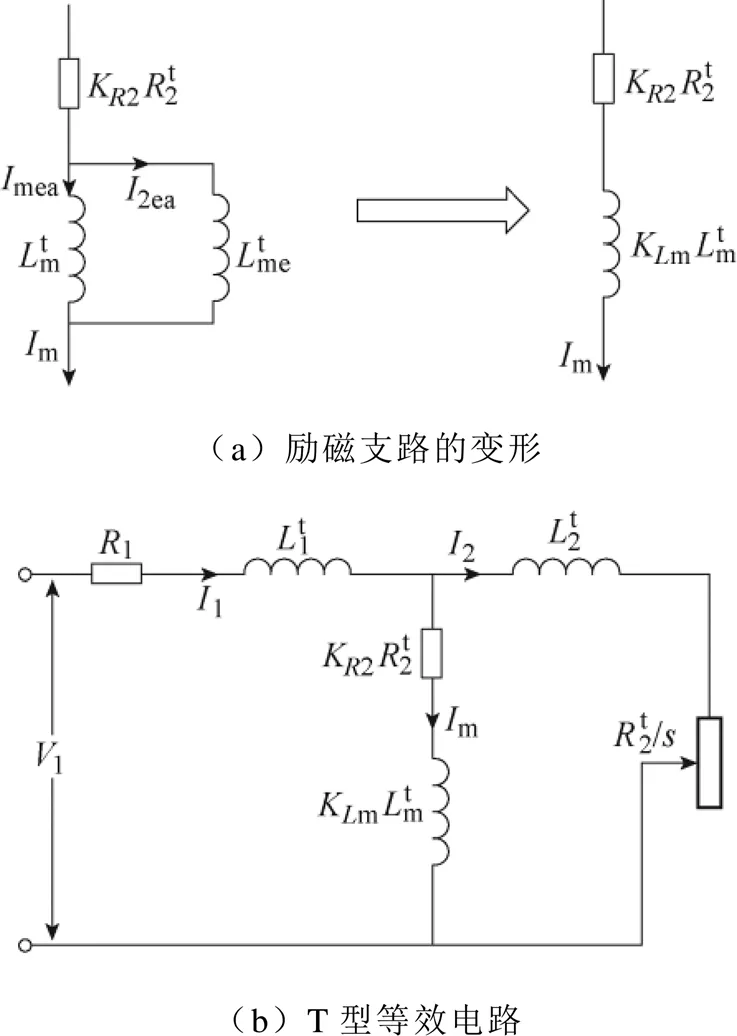
图6 直线感应电机的等效电路

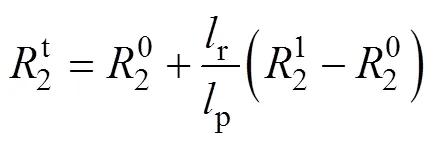

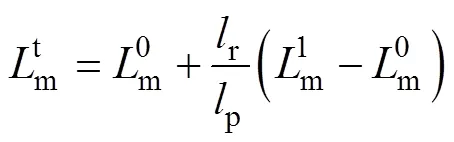
式中,p、r分别为初级长度和耦合区域长度。上标1为次级完整时的参数值,可通过静止状态下的参数辨识求得[18-20];上标0为次级全部缺失时的值,为简化分析,认为无次级板时初、次级无能量传递,故励磁电感、次级漏感和次级电阻均为零,即



2.2.2 励磁支路的修正系数
断续工况阶段1初级仅与次级板1耦合,初级入口端进入缺失区域向次级板2靠近。次级去磁涡流的分布情况如图7所示,1为次级板1的边缘与初级的交点。初级漏感修正后,认为初、次级非耦合区域气隙磁通密度为零,次级去磁涡流的分布与气隙磁场相对应,且缺失区域不产生次级涡流和 推力。
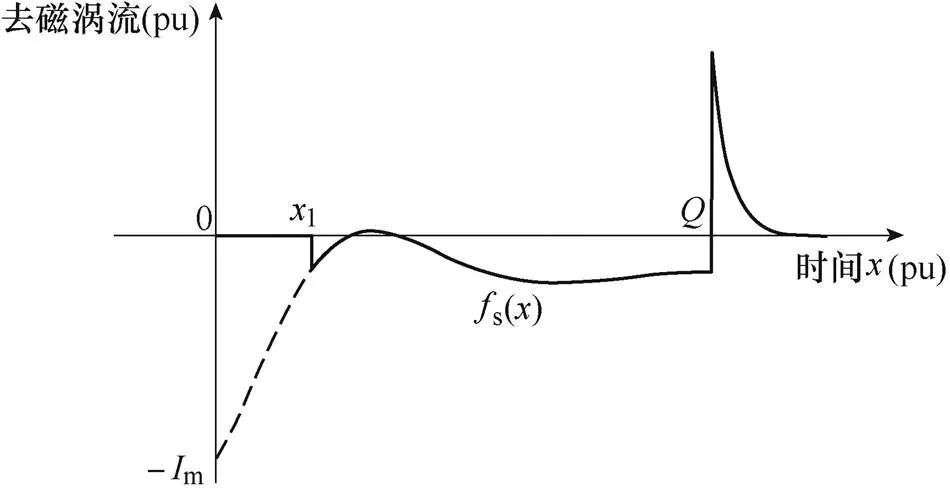
图7 阶段1去磁涡流的分布
纵向端部效应产生的去磁涡流会削弱气隙磁场,此影响通过修正励磁电感来考虑,按照图6a所示的演化过程,有
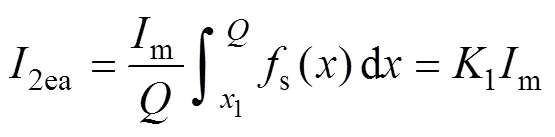

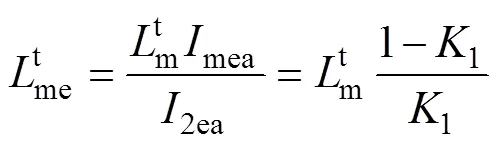

式中,2ea为去磁涡流的平均值;mea为励磁电流的平均值;并联电感me起分流作用,故励磁电感的修正系数为Km=1-1。
励磁支路的电阻表征感应板涡流损耗e,由两部分组成:①初、次级耦合区域的铝板上的涡流损耗e1;②初级出口端外侧感应涡流产生的损耗e2。去磁涡流的方均根值为
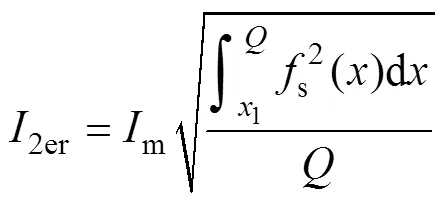
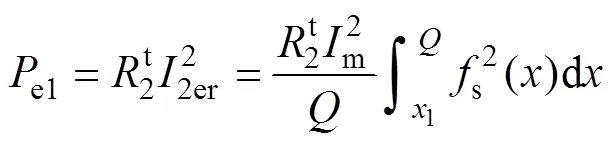


故励磁支路电阻的修正系数为

随着初级往前运动,次级缺失区域在初级下方逐渐向出口端移动,从阶段1过渡到阶段2、3。去磁涡流分布曲线的中断部分随之往后移动,阶段2、3去磁涡流的分布如图8所示,21、22、3分别为运行阶段2、3次级板边缘与初级的交点。
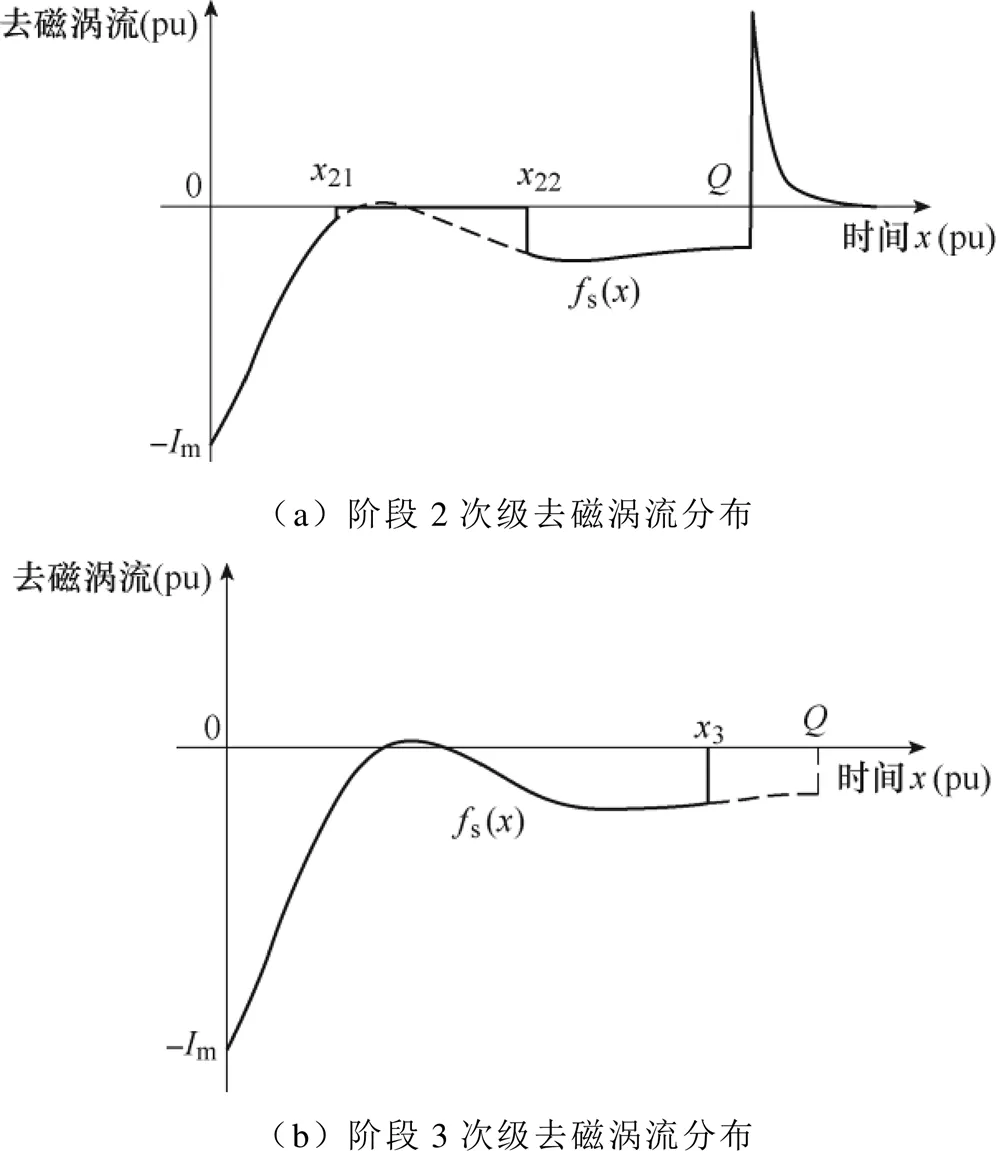
图8 阶段2、3去磁涡流的分布
根据阶段1修正系数的推导过程,结合阶段2、3次级去磁涡流的分布,可得到励磁支路电感和电阻的修正系数Km和K2。至此,次级断续工况各运行阶段励磁支路的修正系数已全部推导出,见表1,结合图6的T型电路,次级断续时的等效电路构建完成。
根据构建的等效电路,可求出次级断续时推力、效率和功率因数等物理量。推力F由两部分组成:①次级转差电流2产生的正推力F1,对应于等效电路中次级支路电阻的损耗;②次级去磁涡流产生的、阻碍初级前进的负推力F2,对应于励磁支路电阻的损耗。
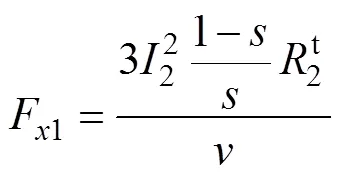
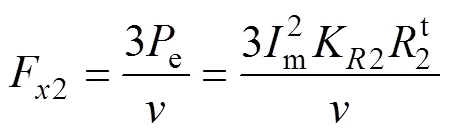
表1 各运行阶段励磁支路的修正系数

Tab.1 Correction coefficient of excitation branch in each operation stage
效率为

3 等效电路的计算结果与实验验证
为了验证所提出的等效电路的正确性,按照表2所示的电机参数,使用Matlab软件计算初级通过断续区域时,等效电路的励磁支路参数和推力、效率的动态变化曲线。
表2 直线感应电机参数

Tab.2 Parameters of linear induction motor
图10为直线感应牵引电机实验台,电机参数同表2。接触轨提供1 500V直流电压,经由VVVF逆变器向电机初级供电,能够改变电压(0~DC 1 100V)和频率(0~35Hz)来驱动。转向架上安装了用于测量力、电压、电流和速度的传感器,数据采集器用Labview编程,获取并处理被测数据。分别使用基于新型磁通密度模型和Duncan模型推导的等效电路(下文分别称为方法1和方法2),计算得到推力和效率的动态变化曲线,与实验测量结果的对比如图11所示。

从图11中可以看出,初级经过断续区域时,推力和效率均先减小后增大,大体上与耦合区域面积呈正相关,为V型曲线。方法1考虑了整个转差范围,得到了更精确的结果,推力、效率动态曲线相比于方法2更接近于实验的测量结果,特别是在推力方面,计算量也没有明显增加。基于等效电路计算得到的推力、效率变化曲线,与实验测量结果大体上是吻合的,无论是在次级连续还是断续区域,二者均有相同的变化趋势,但以下两个因素导致了一些偏差:①基于纵向气隙磁通密度分布模型推导等效电路,未充分考虑横向端部效应的影响;②对初级漏感等参数使用近似线性化处理的方法存在一定误差。
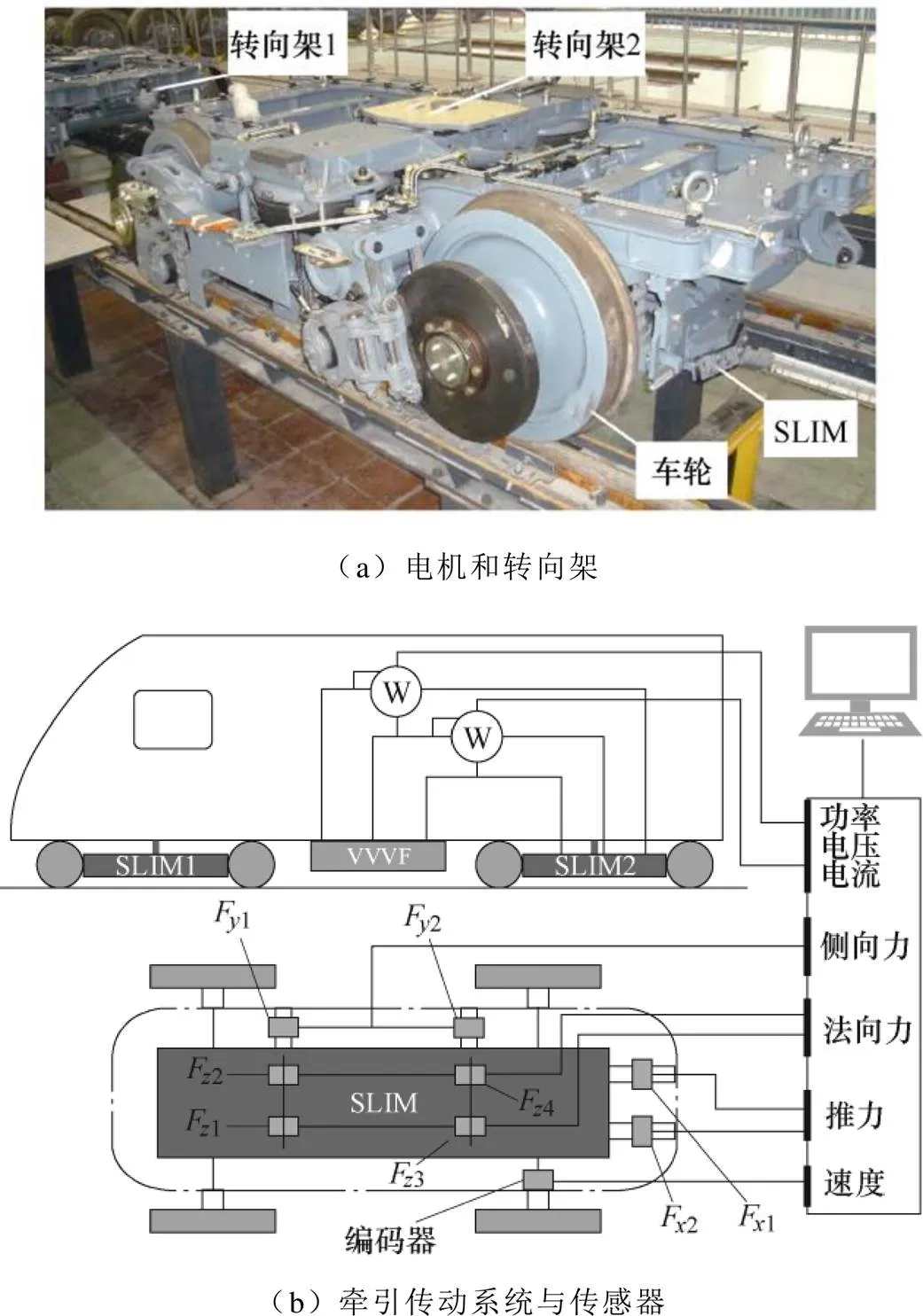
图10 直线感应牵引电机实验台
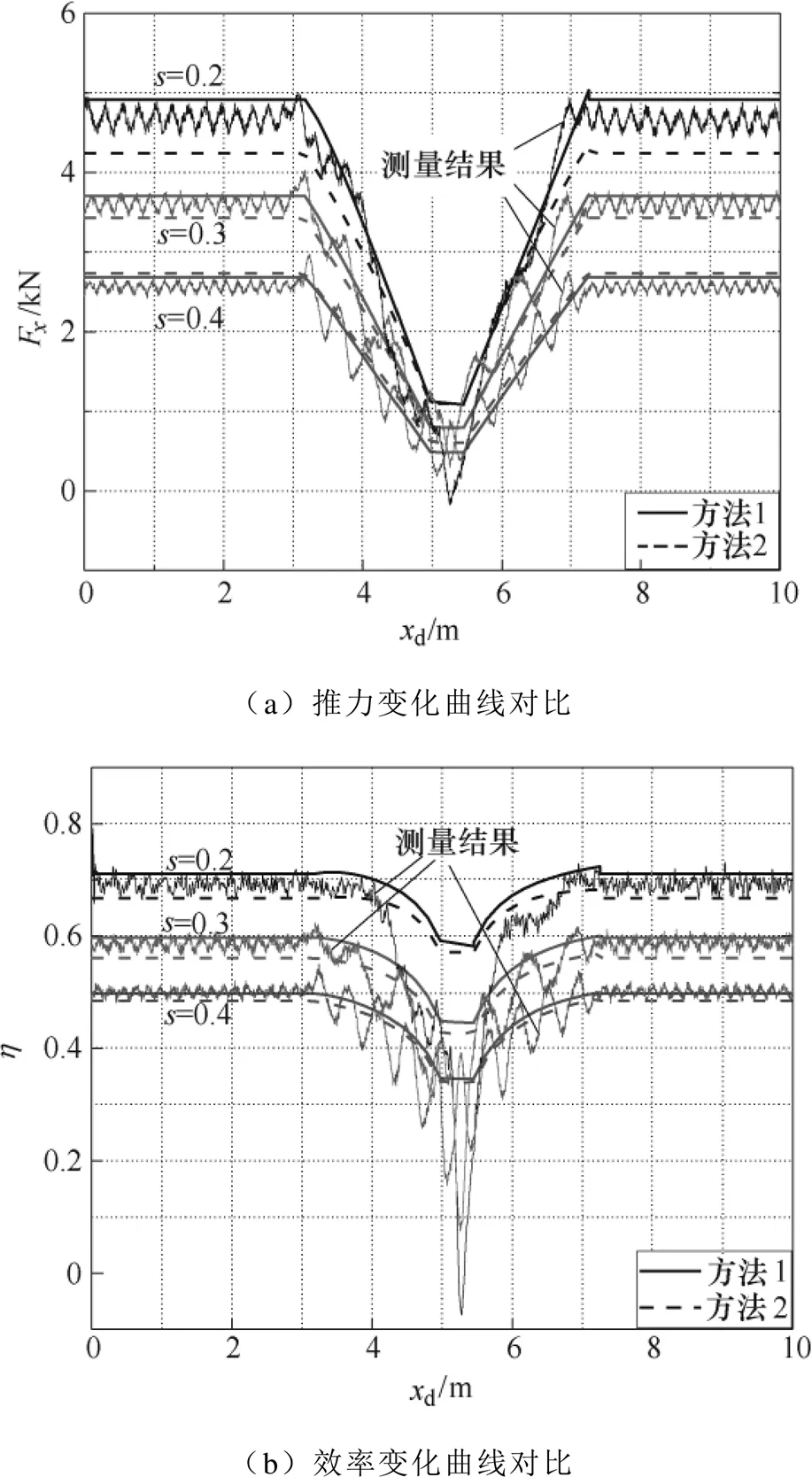
图11 推力和效率变化曲线
4 结论
针对直线轮轨交通线路中初级经过次级感应板断续路段这一特殊工况,本文综合考虑了初、次级耦合区域长度变化和纵向端部效应的影响,基于气隙磁通密度和去磁涡流的分布模型,构建了次级断续时的等效电路。初级漏感、次级电阻等参数变化根据耦合区域线性长度进行近似化处理,基于纵向气隙磁通密度的分布推导出励磁支路电感和电阻的修正系数。根据等效电路计算得到推力和效率的动态变化曲线,与实验台测量结果进行对比,验证了等效电路的准确性。
[1] 卢琴芬, 孔浩, 石佳蒙, 等. 高速列车永磁同步牵引电机基于联合仿真模型的单脉冲控制研究[J]. 电工技术学报, 2015, 30(14): 61-66.
Lu Qinfen, Kong Hao, Shi Jiameng, et al. Research on single-pulse control of traction PMSM in high speed train based on co-simulation model[J]. Transa- ctions of China Electrotechnical Society, 2015, 30(14): 61-66.
[2] 朱进权, 葛琼璇, 孙鹏琨, 等. 基于自抗扰的高速磁浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(5): 1065-1074.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Traction-system research of high-speed maglev based on active disturbance rejection control[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(5): 1065-1074.
[3] 孙晓, 史黎明, 张志华, 等. 并联双边直线感应电机次级定向控制[J]. 中国电机工程学报, 2019, 39(4): 1181-1189.
Sun Xiao, Shi Liming, Zhang Zhihua, et al. The secondary field oriented control of parallel connected double sided linear induction motors[J]. Proceedings of the CSEE, 2019, 39(4): 1181-1189.
[4] 周天豪, 陈磊, 祝长生, 等. 基于自适应变步长最小均方算法的磁悬浮高速电机不平衡补偿[J]. 电工技术学报, 2020, 35(9): 1900-1911.
Zhou Tianhao, Chen Lei, Zhu Changsheng, et al. Unbalance compensation for magnetically levitated high-speed motors based on adaptive variable step size least mean square algorithm[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1900- 1911.
[5] 郑晓钦, 徐杰, 陈春涛, 等. 超高速磁浮涡流装置制动力的解析分析[J]. 电工技术学报, 2020, 35(9): 1891-1899.
Zheng Xiaoqin, Xu Jie, Chen Chuntao, et al. Analytical calculation of braking force of super high speed maglev eddy current device[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1891- 1899.
[6] 张邦富, 程明, 王飒飒, 等. 基于改进型代理模型优化算法的磁通切换永磁直线电机优化设计[J]. 电工技术学报, 2020, 35(5): 1013-1021.
Zhang Bangfu, Cheng Ming, Wang Sasa, et al. Optimal design of flux-switching permanent magnet linear machine based on improved surrogate-based optimization algorithm[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1013-1021.
[7] 李超, 鲁军勇, 马伟明, 等. 电磁发射用多级混合储能充电策略优化[J]. 电工技术学报, 2017, 32(13): 118-124.
Li Chao, Lu Junyong, Ma Weiming, et al. Charging strategy amelioration of multilevel hybrid energy storagefor electromagnetic launch[J]. Transactions of China Electrotechnical Society, 2017, 32(13): 118- 124.
[8] 王金兵, 沈艳霞. 基于增量模型的永磁同步直线电机鲁棒预测电流控制[J]. 电力系统保护与控制, 2020, 48(8): 69-77.
Wang Jinbing, Shen Yanxia. Robust predictive current control for a permanent magnet synchronous linear motor based on an incremental model[J]. Power System Protection and Control, 2020, 48(8): 69-77.
[9] Hu Dong, Xu Wei, Dian Renjun, et al. Loss mini- mization control of linear induction motor drive for linear metros[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 6870-6880.
[10] 吕刚, 孙守光, 马云双. 城轨交通中直线感应牵引电机的效率最优控制[J]. 电机与控制学报, 2009, 13(4): 490-495.
Lü Gang, Sun Shouguang, Ma Yunshuang. Efficiency optimal control of linear induction motor for urban rail transit[J]. Electric Machines and Control, 2009, 13(4): 490-495.
[11] Pai R M, Boldea I, Nasar S A. A complete equivalent circuit of a linear induction motor with sheet secondary[J]. IEEE Transactions on Magnetics, 1988, 24(1): 639-654.
[12] Gieras J F. Linear induction drives[M]. New York: Clarendon Press, 1994.
[13] 龙遐令. 直线感应电动机等效电路的通用推导方法[J]. 电工技术学报, 1993, 8(4): 55-60.
Long Xialing. A general method driving the equiva- lent circuit of linear induction motor[J]. Transactions of China Electrotechnical Society, 1993, 8(4): 55-60.
[14] Xu Wei, Zhu Jianguo, Zhang Yongchang, et al. Equivalent circuits for single-sided linear induction motors[J]. IEEE Transactions on Industry Appli- cations, 2010, 46(6): 2410-2423.
[15] Duncan J. Linear induction motor-equivalent-circuit model[J]. IEE Proceedings. Part B: Electric Power Applications, 1983, 130(1): 51-57.
[16] Lü Gang, Zeng Dihui, Zhou Tong. An advanced equivalent circuit model for linear induction motors[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7495-7503.
[17] 刘可安, 田红旗, 刘勇. 直线感应电机过无次级感应板区检测[J]. 浙江大学学报: 工学版, 2016, 50(6): 9-18.
Liu Kean, Tian Hongqi, Liu Yong. Detection of passing area of no secondary reaction plate for linear induction motor[J]. Journal of Zhejiang Univerisity: Engineering Science, 2016, 50(6): 9-18.
[18] 邸珺, 范瑜, 刘亚静. 基于等效次级的直线感应电机的电磁分析与参数辨识[J]. 电工技术学报, 2017, 32(11): 145-154.
Di Jun, Fan Yu, Liu Yajing. Electromagnetic analysis and parameter estimation for the linear induction motor based on equivalent secondary[J]. Transactions of China Electrotechnical Society, 2017, 32(11): 145-154.
[19] 姜杰, 王学斌, 殷家敏, 等. 基于感应电动机复数简化模型的参数辨识研究[J]. 电力系统保护与控制, 2014, 42(19): 87-92.
Jiang Jie, Wang Xuebin, Yin Jiamin, et al. Research on identification of induction motor based on its simplified complex quantity models[J]. Power System Protection and Control, 2014, 42(19): 87-92.
[20] 吕刚, 杨琛, 罗志昆. 考虑死区时间的直线感应电机参数静止自整定方法[J]. 北京交通大学学报, 2020, 44(1): 91-97, 105.
Lü Gang, Yang Chen, Luo Zhikun. Parameter static self-tuning method of linear induction motor considering dead-time[J]. Journal of Beijing Jiaotong University, 2020, 44(1): 91-97, 105.
[21] Freeman E M. Travelling wave in induction machines: input impedance and equivalents[J]. Proceedings of the Institution of Electrical Engineers, 1968, 115(12): 1772-1776.
An Equivalent Circuit of Linear Induction Traction Motor with Discontinuous Secondary
(School of Electrical Engineering Beijing Jiaotong University Beijing 100044 China)
When linear induction motor is used as traction motor of rail transit vehicles, the secondary induction plate will be missing in turnouts, turns and other sections, and the equivalent circuit with continuous secondary is no longer applicable. For this special working condition, a equivalent circuit based on the new air gap flux density distribution model and considering secondary discontinuity is proposed. Firstly, the analysis model of linear induction motor with discontinuous secondary is established. According to the coupling conditions of the primary and secondary, the discontinuous working condition is divided into three stages. Then, the linear approximation method is used to correct the primary leakage inductance, excitation inductance and other parameters which vary with the length of the coupling region. Combined with the new air gap flux density distribution model and the discontinuous condition of the secondary, considering the influence of longitudinal end effect, the excitation inductance on the excitation branch and the equivalent resistance representing the eddy current loss of end effect are modified. The equivalent circuit of three stages is derived to represent the dynamic process of the primary passing through the discontinuous region of the secondary induction plate. Finally, the dynamic curve of the thrust and efficiency of the motor are obtained according to the equivalent circuit, and the correctness of the proposed equivalent circuit is verified by comparing with the experimental results.
Linear induction motor, discontinuous secondary, equivalent circuit, longitudinal end effect, air gap flux density
TM359.4
10.19595/j.cnki.1000-6753.tces.200804
国家自然科学基金资助项目(51777009,52077003)。
2020-07-07
2020-12-24
吕 刚 男,1976年生,博士,教授,研究方向为轨道交通直线电机与磁悬浮技术。E-mail: ganglv@bjtu.edu.cn(通信作者)
罗志昆 男,1996年生,硕士研究生,研究方向为直线电机及其控制。E-mail: 18121474@bjtu.edu.cn
(编辑 陈 诚)
猜你喜欢
电工技术学报(2023年15期)2023-08-10 06:43:38
电气技术(2023年7期)2023-08-08 05:26:36
大电机技术(2022年4期)2022-08-30 01:38:54
大电机技术(2022年2期)2022-06-05 07:28:34
新疆钢铁(2021年1期)2021-10-14 08:45:38
能源工程(2020年6期)2021-01-26 00:55:18
铁道通信信号(2020年10期)2020-02-07 01:01:14
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
电测与仪表(2015年3期)2015-04-09 11:37:52