利用移动护栏的潮汐车道设计与实现
2021-03-25 02:09李冰林吕立亚
软件导刊 2021年3期
李冰林,吕立亚
(南京林业大学汽车与交通工程学院,江苏南京 210037)
0 引言
为缓解部分主干道早、晚高峰时段出现的交通堵塞,提出潮汐车道解决方案,根据道路早晚高峰交通流、道路双向通行能力不均衡情况自动设置可变车道数量,该方法有助于缓解城市道路交通拥堵情况[1-2]。目前国内对潮汐车道研究主要在车道分配优化[3-4]、车道设置[5-7]、交通管理或组织形式上采用诱导线或分隔线进行引导[8]、车道车流量预测仿真[9]、信号灯协同控制算法[10-11]等方面。在实现方式上主要采用特殊标志道路分隔线或人工移动交通锥完成。采用特殊标志道路分隔线方法对陌生车辆很难实现引导,而且驾驶员需要高度集中注意力,容易产生驾驶疲劳,一旦产生交通事故可能造成更大的拥堵;人工移动交通锥费时、危险、安全没保障。美国旧金山的潮汐车道运营数年,采用拉链车通过移动交通锥改变车道数量,造价上千万,成本较高。
本文针对交通道路拥堵问题,设计一种移动隔离护栏的潮汐车道,具有手动控制、自动控制和远程遥控功能。该移动护栏通过控制电机实现护栏移动,同时利用图像处理技术识别车道标志线,使隔离护栏停在所需位置;系统利用无线模块实现网络组网功能及远程控制,利用有限状态机理论使护栏达到同步移动目的。另外,通过超声波模块对行人或车辆检测,保护护栏内行人安全。
1 系统架构及方案设计
无线传感网络拓扑结构通常有星型、树簇型和网状型。星型网络中间有协调器,与其它节点直接通信,网络结构简单[12-13]。本设计主要由遥控器或PC 机负责控制护栏运行,反馈各子护栏信息。基于IEEE 802.15.4 标准,采用星型拓扑网络结构方式组网[14],如图1 所示。中继端负责对遥控端和PC 端指令如前进、后退和停止信号进行转播,由各子护栏接收,同时也接收子护栏发送回来的运行状态信号,如遇报警则将信号通过中继反馈给PC 端。
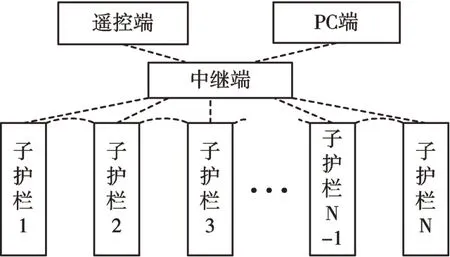
Fig.1 System wireless network topology图1 系统无线网络拓扑结构
系统利用电机移动对隔离栏运行实时控制、智能调度与运行自动化,具有故障报警、紧急停车、车道识别功能。硬件系统包括ARM 嵌入式控制器、远距离通信模块、超声波探测模块、摄像头模块、电机及驱动器、护栏机械本体等,如图2 所示。

Fig.2 Composition of mobile barrier图2 移动隔离栏组成
通常城市街区路段间距小于500m,潮汐车道的隔离护栏需由多个子隔离栏组成,同时应做到各子隔离护栏接近同步移动,最终能各自定位。因此,该任务分解为如下问题:①子隔离护栏准确定位。采用图像处理技术对交通道路分隔线进行采集识别;②多个子护栏协同移动。多个子护栏移动过程涉及到多组信息交互可靠性;移动过程中存在单个隔离护栏出现故障不同步问题,还有行人靠近问题,要设计一套可靠的控制方法使各护栏协同移动;③为便于交通部门管理,采用远程PC 控制和现场遥控方式。为方便将来与智能交通信息交互,需开发远程控制上位机软件。
综上,对道路分隔线识别及各护栏协同移动是本设计的主要内容。
2 道路分隔线图像识别
道路交通分隔线通常是黑黄或黑白相间,为使各子隔离护栏移动到位,需识别出道路分隔边缘线。
2.1 Canny 算子
Canny 算子边缘检测具有较高精确度,输出图像效果较好,与其它边缘检测算子相比失误率较低[15-16]。为使图像有较强的抗噪性,Canny 算子采用高斯噪声的平滑处理,通过双阈值算法检测连接边缘,经其处理后的图像边缘连续性较好,适用于道路交通分隔线边缘提取。
Canny 算子算法如下[17-18]:
(1)对道路分隔线图像进行处理之前先利用高斯平滑滤波器去噪,即利用高斯平滑滤波器与获取的图像做卷积:

式(1)中,f(i,j) 为去噪前某点的灰度值,G(i,j;σ) 为高斯平滑滤波器函数;σ是高斯函数参数,决定图像平滑程度。在此σ取值0.65,滤波宽度为5。图3 为道路分隔线原始图像,图4 为高斯滤波后的图像,对比可以发现滤波后的图像椒盐噪声小。

Fig.3 Original image图3 原始图像

Fig.4 Gaussian filtered image图4 高斯滤波后图像
(2)利用Sobel 算子找到图像灰度沿两个方向的偏导数,获得梯度幅值和方向。平滑后S(i,j) 的梯度采用式(2)中2×2 的模板作为对x和y方向偏微分的一阶近似:

由此可得:
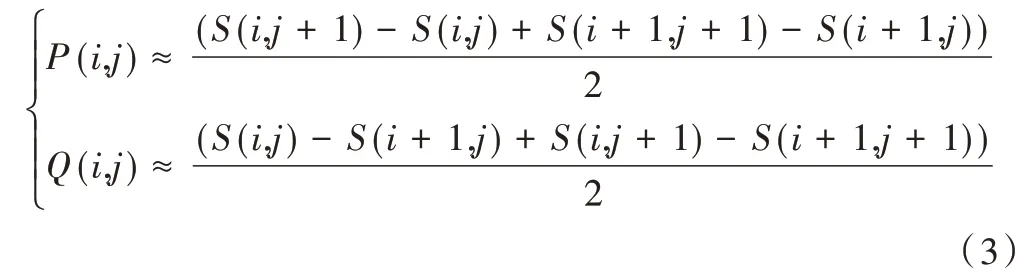
梯度幅值为:

梯度方向为:

M(i,j) 反映图像上(i,j) 点处的边缘强度,a(i,j) 是该点的法向方向,M(i,j) 取得局部极大值时a(i,j) 即为边缘方向。图5 为图像灰度化后强度梯度处理结果。
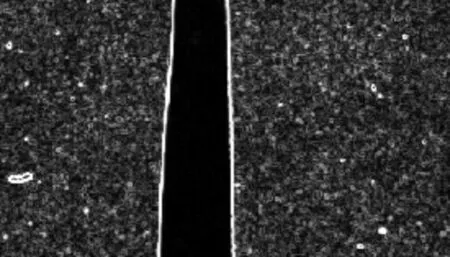
Fig.5 Image intensity gradient processing results图5 图像强度梯度处理结果
(3)梯度幅值非极大值抑制。通过平滑处理、图像梯度幅值和方向运算,得到全局梯度并不足以确定边缘,可通过非极大值抑制法抑制梯度方向上所有非屋脊峰值幅值,达到细化边缘目的。
(4)用双阈值算法检测。双阈值检测方法能使经过非极大值抑制处理后的图像得到一个图像的边缘矩阵,有效去除假边缘[20]。
设经过非极大值抑制后的图像为N(i,j),采用最优阈值法得到其中一个阈值N2:

其中,μ1、μ2分别是目标区域的平均灰度值,σ是均值的均方差,P1、P2分别是目标区域灰度值的先验概率,另一个阈值N1取为N2的40%。
分别使用阈值N1和N2对N(i,j) 进行检测,将梯度小于阈值的像素灰度值变为零,分别得到两个阈值边缘图像T1(i,j) 和T2(i,j)。由高阈值N2得到的图像T2(i,j) 假边缘很少,然后把高阈值图像作为标准,把低阈值图像作为辅助,获取较好的边缘,如图6 所示,N2取值为120。
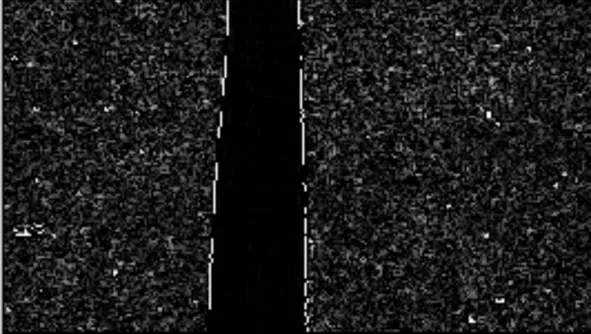
Fig.6 Detection results of double threshold algorithm图6 双阈值算法检测结果
(5)边缘连接。对图像T2(i,j) 进行扫描,检测到非零灰度值像素时,跟踪该像素到轮廓端点A,此时找到该端点在图像T1(i,j) 中对应的点,再寻找可连接到轮廓的像素,然后对应到图像T2(i,j) 中的像素B,再将像素A 与B 连接。重复循环,Canny 算法不断在图像T1(i,j) 中收集边缘,直到将图像T2(i,j) 连接起来为止,此时Canny 获得比较好的道路分隔线边缘,如图7 所示。

Fig.7 Results after edge extraction图7 边缘提取后结果
边缘提取方法只产生边缘上的像素,但实际上隔离护栏有时可能运行在噪声、环境和杂散的亮度不连续状况下,难以得到完全的边缘特性。Hough 变换可以寻找并连接图像中线段。
2.2 Hough 变换
Hough 变换将图像空间中的曲线变换到参数空间中,再检测参数空间中的极值点,确定描述曲线的参数,从而提取图像中的规则曲线[19]。由于道路交通分隔线基本为直线或近似于直线,所以本文采用直线Hough 变换。直线模型为:

其中,ρ是从原点引到直线的垂线长度;θ是垂线与x轴正向夹角。Hough 变换将图像空间中任意一点(x,y) 映射到参数空间(θ,ρ) 中的一条正弦曲线上并经过点(θ0,ρ0),在参数空间中这个点的坐标就代表图像空间这条直线的参数。针对道路交通分隔线,经过Hough 变换后的结果如图8 所示。
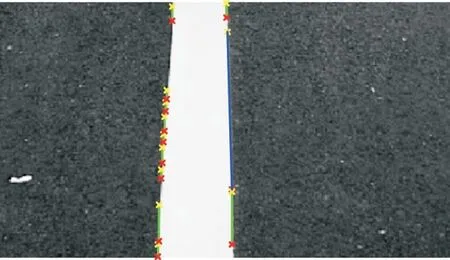
Fig.8 Hough transform image图8 Hough 变换后图像
由此获得隔离线与子护栏本体的相对坐标位置,在护栏运行过程中,当偏差越来越小接近于0 时即认为已经寻线定位成功。
3 各子护栏协同运行控制
有限状态机表示有限个状态及在这些状态之间的转移和动作等行为的数学模型,可以是对象在它的生命周期内所经历的状态序列,以及如何响应来自外界的各种事件[21]。本系统各个隔离子护栏除了要求参数标准尽量一致外,还需统一接受指挥调度实现协同移动,一旦其中一个出现故障而停机,或有人或车接近,需做到同步停止。每个护栏状态都在行走、停止、等待、继续行走、故障等状态间切换,适合采取有限状态机方法进行控制。
说明:表中的命令“xxErr”中“xx”代表第xx 号护栏出现故障,其它指令意思相同。
表1 和表2 分别表示中继器和子护栏的各个状态转移及指令。其中表1 的指令“运行命令”包含前进、后退、停止命令,“状态命令”包括正常、故障指令。
中继器接收遥控器指挥运动命令,如通知各个子护栏进行运动前的上电命令(AllON)、接收通信成功确认信息(AllOK)、护栏运动命令(AllGO)等;子护栏移动到位后接收完成指令(RunOver);在移动过程中,如出现有人或车辆靠近护栏,护栏应立即停止运行并通知中继站,由中继站通知其它子护栏停止运行(AllOFF);一旦障碍物解除,中继站再与各子护栏通知上电与通信确认。中继站程序状态如图9 所示。

Table 1 Repeater state transition and command表1 中继器状态转移和命令

Table 2 Sub-guardrail state transition and command表2 子护栏状态转移和命令

Fig.9 Repeater control software status图9 中继器控制软件状态
子护栏控制器主要完成电机控制与各类命令接收,以及发送运行状态信息,软件控制状态如图10 所示。子护栏接收上位机发来的电机上电命令(xxON),上电后通信确认命令(xxOK);运行命令(xxGO),定时时间到后开启摄像头寻线模式,寻线结束发送到位命令(xxRunOver)。一旦此过程检测到障碍物靠近(人或车),进入停止运动模式,发送停止命令(STOP),让中继站通知所有子护栏停止;一旦障碍物撤离,先由中继站与各子护栏确认通信正常(xxC⁃TOK),然后通知子护栏再运动(xxCTGO),所有子护栏恢复工作,减去之前运行的时间,再开启摄像头寻线模式,完成寻线定位。
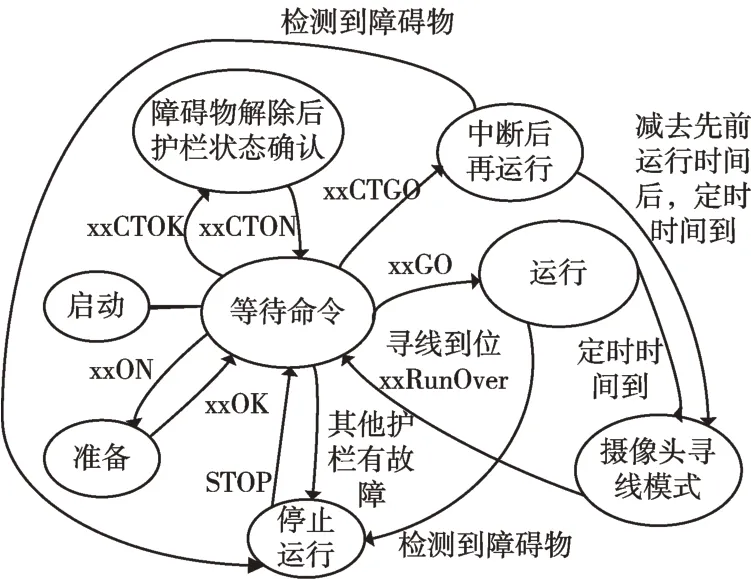
Fig.10 Sub-barrier control software status图10 子隔离栏控制软件状态
4 系统单元设计
根据前述功能,系统所涵盖的硬件电路模块由MCU控制单元、摄像头、无线通信、步进电机驱动、报警系统、超声波、主控、电源等组成。硬件系统组成如图11 所示。

Fig.11 Composition of hardware circuit system图11 硬件电路系统组成
MCU 为系统核心,负责处理外部传感器信息和电机运行;超声波模块起到防避撞作用;光电传感器在光照强度不够时采用LED 补光;报警装置使系统在移动过程中发出蜂鸣和闪烁光,提醒路人不要靠近。
4.1 无线通信模块
系统无线通信模块为E34-TTL-100,功率100mW,在2 400~2 518MHz 频段工作,传输最远距离可达1 000m,抗干扰能力强。此模块具有数据加密和压缩功能。数据压缩功能可减少传输时间及受干扰概率,提高可靠性和传输效率。它与主控单元MCU 通信方式采用串口通信协议,如图12 所示。

Fig.12 Connection between wireless serial port module and MCU circuit图12 无线串口模块与MCU 电路连接
4.2 超声波模块
在护栏双侧设计超声波模块,作用是护栏在执行动作命令时,若检测到前方0.5m 的扇形区域内有障碍物,就发出一个高电平信号,通知MCU 使电机停止移动。当再次检测到没有障碍物时则使CPU 继续执行之前的命令。采用XKC-ME007Y-TX-X 型号的防水超声波传感器模块,测量精度高。系统中继器单元和MCU 控制单元电路实物分别如图13、图14 所示。
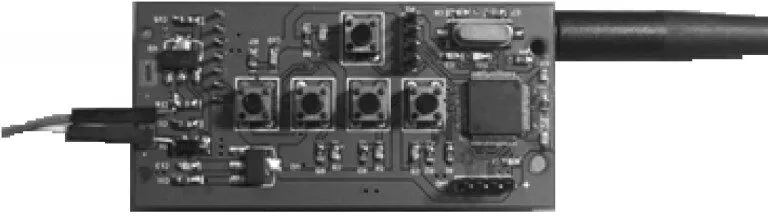
Fig.13 Repeater unit图13 中继器单元
Fig.14 MCU control unit图14 MCU 控制单元
5 试验过程与结果
为验证系统运行效果,在试验场地进行现场遥控操作、障碍模拟等试验。图15 为调试现场图。试验结果表明,各个子隔离护栏能同步移动,准确定位,误差在2cm 以内,满足设计要求。

Fig.15 Field experiment图15 现场运行实验
2019 年深圳市交警局采用本设计在深南大道南新路口至南山路口之间试运行全国首条基于智慧移动护栏的潮汐车道。试运行统计表明,早高峰时西往东方向通行能力提升12.1%,平均车速提高29%,表明该潮汐车道设计能有效提高相关路段车辆通行能力。
6 结语
本文采用图像处理技术对道路分隔线进行提取,利用无线通信网络对系统进行组网,采用有限状态机方法对各子隔离护栏协同控制,并采用防撞保护技术保护行人安全。设计的潮汐车道经过实际调试及试运行,实现对车道的合理分配,提高了道路通行效率。与传统的人工潮汐车道相比,省时省力。随着国内ITS 系统的建设与完善,系统可与ITS 信息对接,利用交通流量数据优化算法,智能控制护栏运行,提高城市交通利用率,降低交通成本。未来可与车联网融合扩展功能,发展绿色、快捷、智能化交通系统。
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
中国交通信息化(2020年7期)2021-01-14
电子制作(2019年20期)2019-12-04
军营文化天地(2018年2期)2018-04-20
公民与法治(2016年16期)2016-05-17
中国老区建设(2016年9期)2016-02-28
中国交通信息化(2015年10期)2015-06-06