
双雷达联合测速系统研究
2021-03-23 06:46刘亚奇郑广瑜
现代城市轨道交通 2021年3期
顾 明,周 媛,刘亚奇,郑广瑜
(1.上海申通地铁集团有限公司技术中心,上海 201103;2.上海无线电设备研究所,上海 201109;3.上海市目标识别与环境感知工程技术研究中心,上海 201109)
1 引言
轨道交通具有运量大、占地少、单位运量能耗小等诸多优点,因此世界各国均将其作为综合交通系统建设的重点[1-5]。
列车自动控制系统(ATC)是以技术手段对列车运行方向、运行间隔和运行速度进行控制,以实现其安全、高效运行的系统。随着轨道交通列车运行速度的大幅提升、行车密度的不断提高及追踪间隔的逐渐缩短,行业对于ATC系统及其核心设备的安全性、可靠性及精确性要求日益增长[6-9]。该系统需要实时、精确地获取列车运行速度及位置信息,以实现对运行过程的精细化控制。而高精度自主测速传感器是该系统的核心传感器之一。其中,雷达测速系统具备精度高、受环境影响小、价格低等优点,有突出的技术优势[10-12]。
然而,目前的雷达测速系统多采用单部雷达测速,由于雷达天线相位中心与天线几何中心通常不重合,因此确定雷达垂直高度存在很大困难。此外,对于不同线路、不同列车及不同雷达安装位置,都需要进行相应的雷达天线相位中心高度测量。为解决上述问题,本文探索采用2部雷达进行双视角、双波束探测,并利用2部雷达测得的数据联合解算列车速度;并考虑到实际工程应用对于系统质量、尺寸以及可靠性的要求,采用高性能高集成硬件电路设计,从而提升系统对应用环境的适应性。
2 双雷达联合测速原理
2.1 雷达测速基本原理
物体辐射的电磁波频率因为波源和观测者的相对运动而产生变化,这种现象被称为多普勒效应。雷达测速法就是利用这一效应测量列车运行速度。测速雷达安装在列车车底,雷达天线以一定的角度向轨面发射电磁波,电磁波经轨面反射回天线,如图1所示。由于雷达随列车产生相对于轨面的运动,因此发射波和反射波之间存在一定的频率差(即多普勒频移量)。如果列车处于前进状态,反射波频率高于发射波频率;反之,则低于发射波频率。列车运行速度越高,多普勒频移量越大。通过测量此频移量便可计算出列车的运行方向和即时运行速度。多普勒频移量fd的计算公式如下:
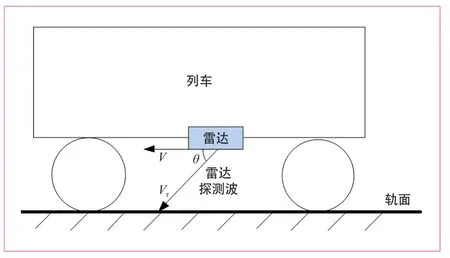
图1 雷达测速示意图

式(1)中:λ为雷达波波长;θ为雷达天线与轨面的夹角(雷达波发射角);V为列车相对于轨面的行驶速度;Vr为雷达相对于轨面的径向运行速度,是V在雷达水平面上的分量。
在测速过程中,雷达天线不是垂直于地面,而是与地面呈一定的夹角。列车在运行时会不可避免地产生颠簸振动,尤其是遇到坡道或者弯道等复杂路面时,而颠簸振动会使雷达天线与地面之间的夹角发生改变,雷达垂直高度H随之变化,从而导致极大的测量误差。针对列车颠簸引起的测速误差大的问题,可在雷达测速传感器内配置2个互成角度的微波模块,通过对其采集的信号进行分析和处理,实现角度误差补偿,如图2所示。
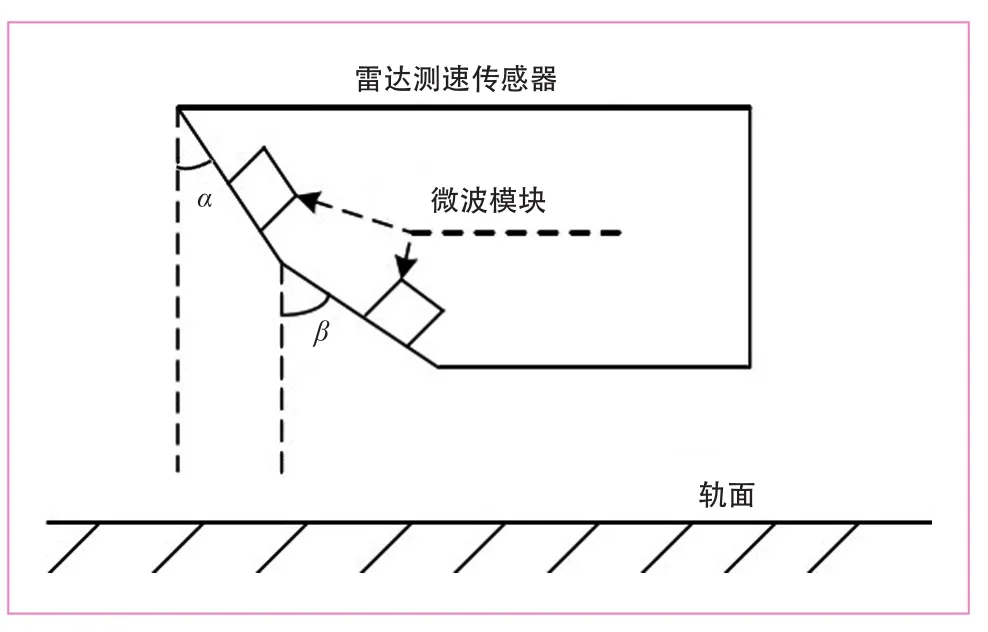
图2 雷达探测角示意图
2.2 双雷达联合测速
为解决单部雷达测速时因列车振动导致雷达垂直高度H产生误差,使测速精度偏低的问题,本文提出双雷达联合测速方法,即利用2部雷达同时进行相关参数测量,然后根据测得的2部雷达垂直高度差及多普勒频移量对单个雷达垂直高度进行解算,进而求解列车速度。这种方法只需测量2部雷达的垂直高度差,无需分别测量各雷达垂直高度,可消除雷达垂直高度的标定误差及列车颠簸引起的测量误差。
双雷达联合测速的计算方法如下。
设2部雷达的垂直高度分别为H1和H2;雷达1测得的斜距为R1,测得的多普勒频移量为fd1;雷达2测得的斜距为R2,测得的多普勒频移量为fd2。
根据图3所示的几何关系可以得到如下2个多普勒方程:
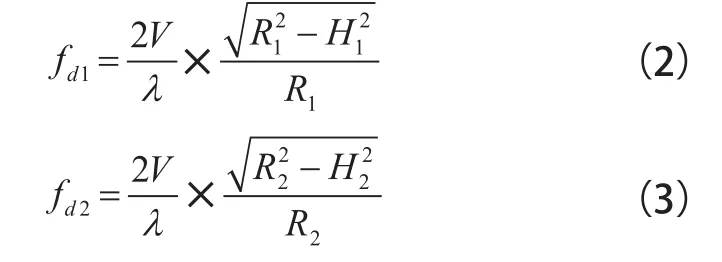
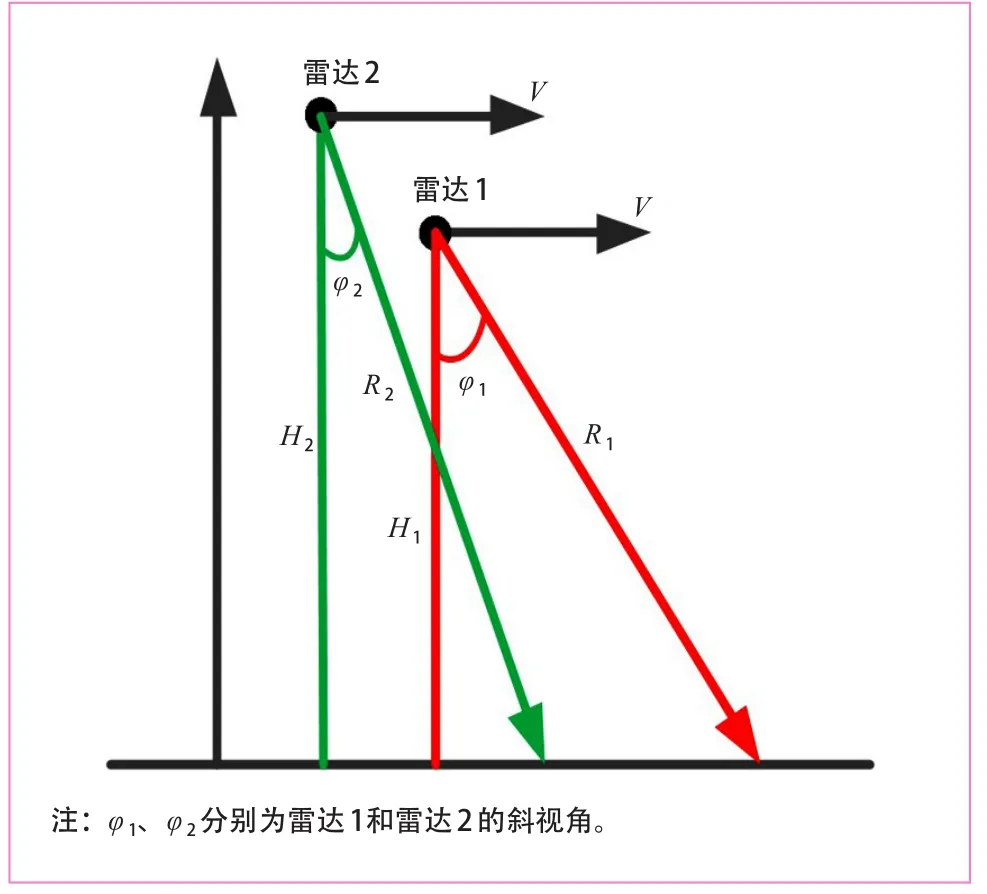
图3 2部雷达联合测速几何关系
假设2部雷达高度差已知,则式(3)可以表示为

由于2部雷达测量的速度相同,联立式(2)和式 (4)可以得到

通过求解式(5)即可得到雷达1的高度H1,进而得到雷达2的高度H2。将解算得到的雷达绝对高度H1或H2代入式(2)或式(3)即可解算列车速度。
3 双雷达联合测速系统构成及优点
双雷达联合测速系统采用雷达1和雷达2两组收发通道,收发天线分置。2部雷达除调频斜率互异外,调频带宽、脉宽、调频率等参数完全一致;两者独立工作,在加电后分别接收信息处理板指令,并同时进入测距测速模式,其发射天线分别发射经信号波形调制的、正交的大带宽线性调频连续波信号,接收信号时采用去斜接收的方式,以此提高系统的鲁棒性和可靠性。系统原理框图如图4所示。
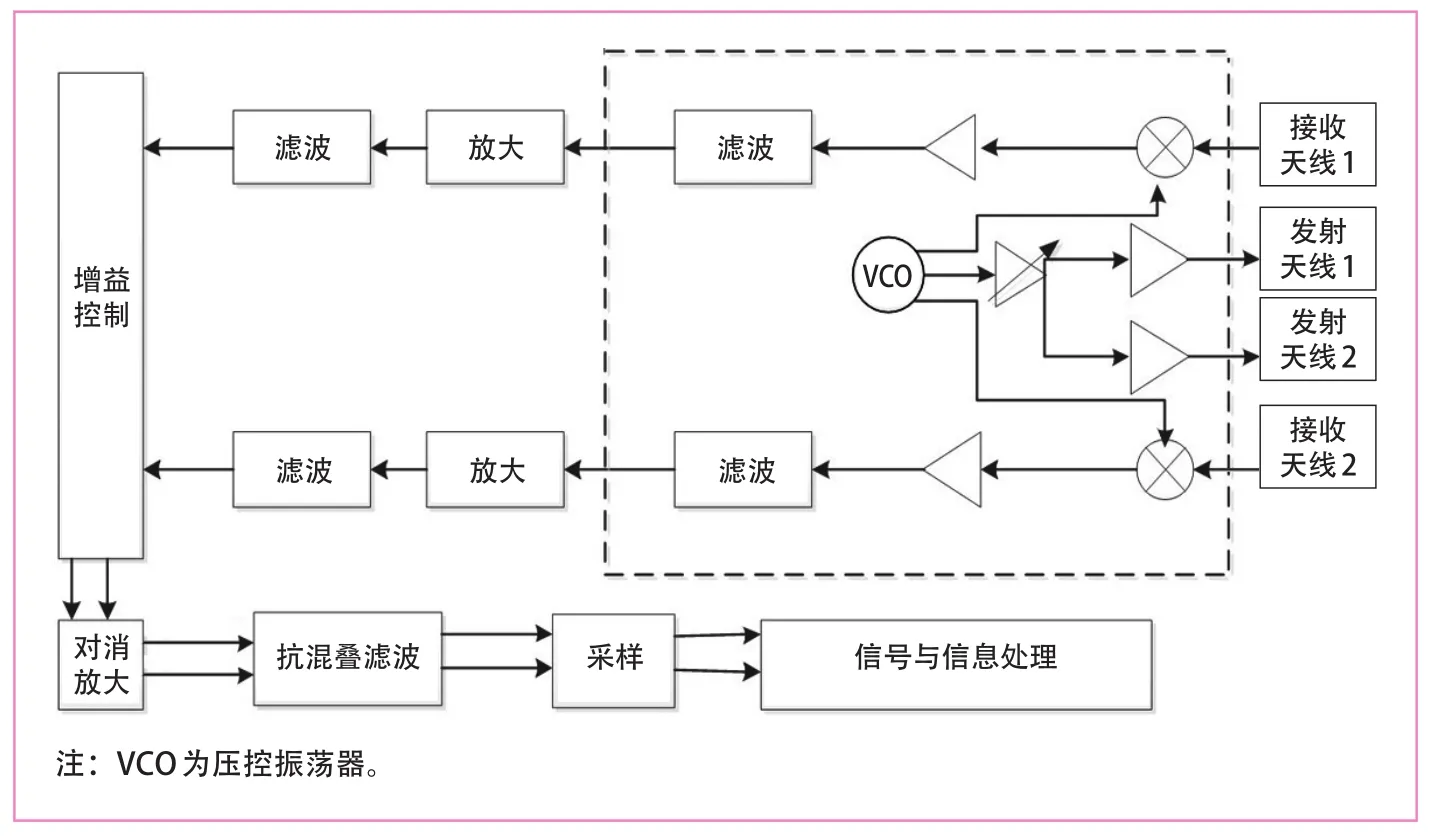
图4 系统原理框图
天线采用微带阵列天线,其具备主瓣宽度窄、方向图可赋形、交叉极化电平低的特点。主瓣宽度窄可提高天线的定向辐射能力,使其满足苛刻的环境需要。微带天线易于集成,可实现在一块介质基片上承载整个天线和馈电系统的目标,且具有体积和质量小的优点。此外,天线利用印制电路板(PCB)等成熟的工艺技术加工而成,这些工艺的精度远高于金属波导的制作和开槽工艺。
在硬件组成方面,收发天线、微波探测前端、信号与信息处理单元、电源采用集成设计,将其集成到1块电路板上,以减小系统尺寸和质量。鉴于当前单片集成电路(MMIC)应用条件的日趋成熟,以及当前实验条件的限制,采用微带混合集成电路和MMIC相结合的信号产生方式。MMIC芯片的使用可以最大限度地减小系统的体积,降低其设计复杂程度。此外,MMIC芯片也易于实现数字控制,可通过接口对其进行控制,从而实现高性能高集成的硬件电路设计及系统的优化。因此,MMIC可满足系统对质量、尺寸以及可靠性的要求。
4 系统测速精度分析
本章将从影响测速精度的2个误差因素(即多普勒频移量估计误差、雷达垂直高度偏差)出发,对双雷达联合测速系统与其所含单部雷达的测速精度进行对比分析。
4.1 多普勒频移量估计误差
多普勒频移量估计误差Δfd与雷达测速误差ΔV之间的关系为:
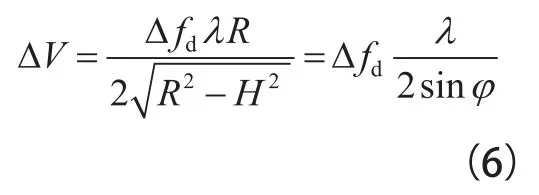
式(6)中,R为雷达测得的斜距;H为雷达垂直高度;φ为雷达斜视角。由式(6)可知,对于单部雷达测速系统,当φ不变时,ΔV与Δfd成正比关系。图5是双雷达联合测速系统及其所含各雷达(高雷达垂直高度为距轨面0.95 m、低雷达为0.8 m)的测速仿真计算结果。由图可知,雷达测速误差随着多普勒频移量估计误差的增大而增大,且当多普勒频移量估计误差相同时,安装位置较高的单雷达(以下简称“高雷达”)相比位置较低的单雷达(以下简称“低雷达”)测速误差更小,而双雷达联合测速系统的测速误差较任意单部雷达更小且波动较小,曲线较平稳。

图5 多普勒频移量估计误差导致的测速误差
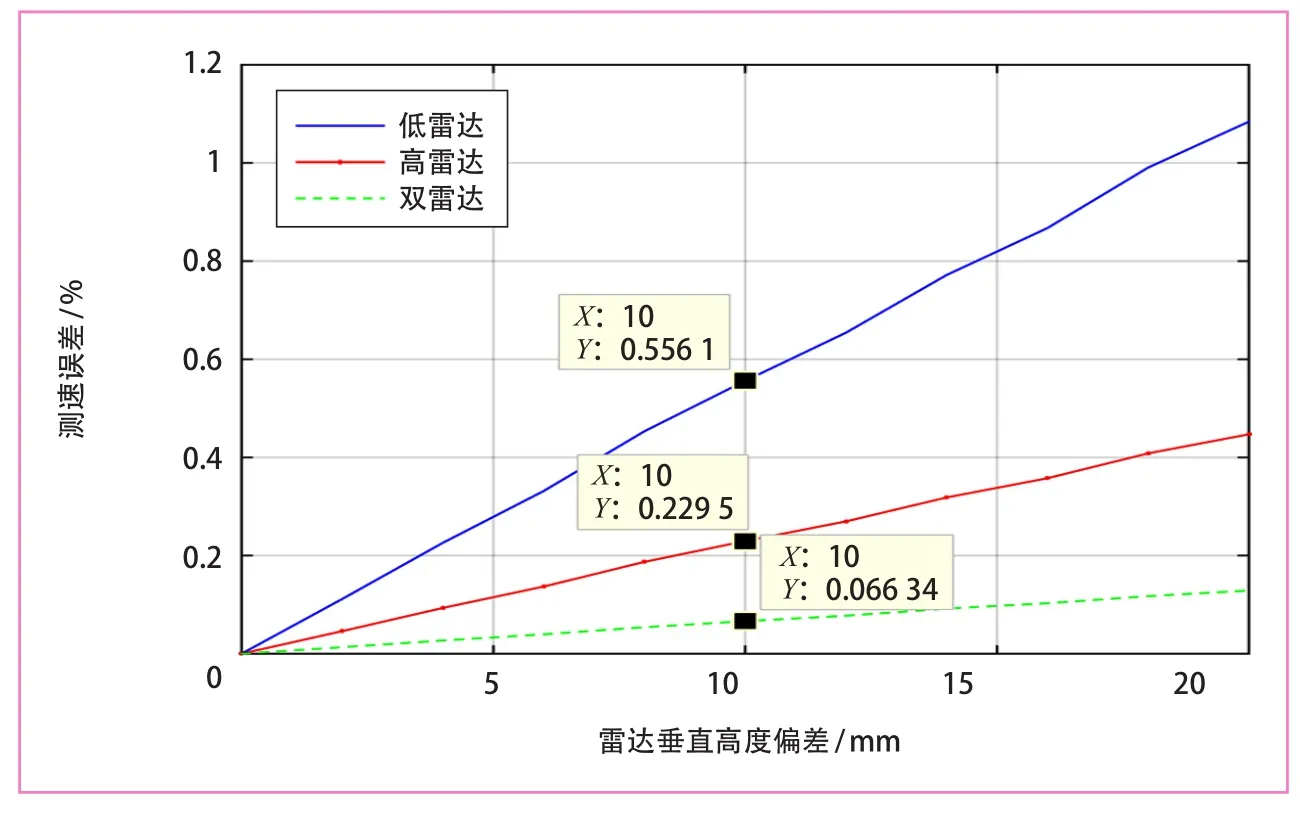
图6 雷达垂直高度偏差导致的测速误差
4.2 雷达垂直高度偏差
由式(2)或(3)可知,单部雷达测速首先需要精准地测量雷达垂直高度。然而,实际上雷达天线的相位中心通常并不是天线的几何中心,且列车在运行时会不可避免地产生颠簸振动,致使雷达垂直高度H随之变化,从而导致极大的测量误差(图6)。由图可知,雷达测速误差ΔV随雷达垂直高度偏差的增大而增大,且在低雷达上体现得尤为显著。正常情况下,列车垂向位移在cm量级时,ΔV可达到0.5~1 cm /s量级;在斜视角φ为55°的条件下(注:雷达垂直高度越低,φ越大),ΔV将放大到1.42倍,达到1.5 cm /s量级;在φ为65°的条件下,ΔV将放大到2.14倍,达到2 cm /s量级。考虑到低雷达与高雷达的安装高度分别为0.8 m和0.95 m,其仿真测得的最大测速偏差可达到1.3%。而双雷达联合测速系统只需测量2部雷达的垂直高度差,无需测量单部雷达的垂直高度,因此可减小单部雷达测速时因垂直高度偏差引起的标定误差。
5 试验验证
为对双雷达联合测速系统的精度和稳定性进行试验验证,将本系统及市面上的一款高精度(测速范围0.5~500 km/h内的误差<0.2%)进口激光测速系统(哈斯勒Corrail 1000)安装在一列地铁试验列车上,并分别对比其在列车最高运行速度为60 km/h和80 km/h时,以及在加速阶段和减速阶段4种工况下的测速结果。
图7a和图7b分别为双雷达联合测速系统与激光测速系统在列车从静止状态启动,到维持最高运行速度60 km/h或80 km/h一段时间,再制动至停止的过程中的测量结果对比图,图7c和图7d分别为2个系统在列车加速和减速阶段的测量结果对比图。由图可知,双雷达联合测速系统与激光测速系统的测量结果基本吻合,且波动更小;双雷达联合测速系统具有较高的精度和稳定性,在一定速度范围内可达到进口激光测速系统的水平。
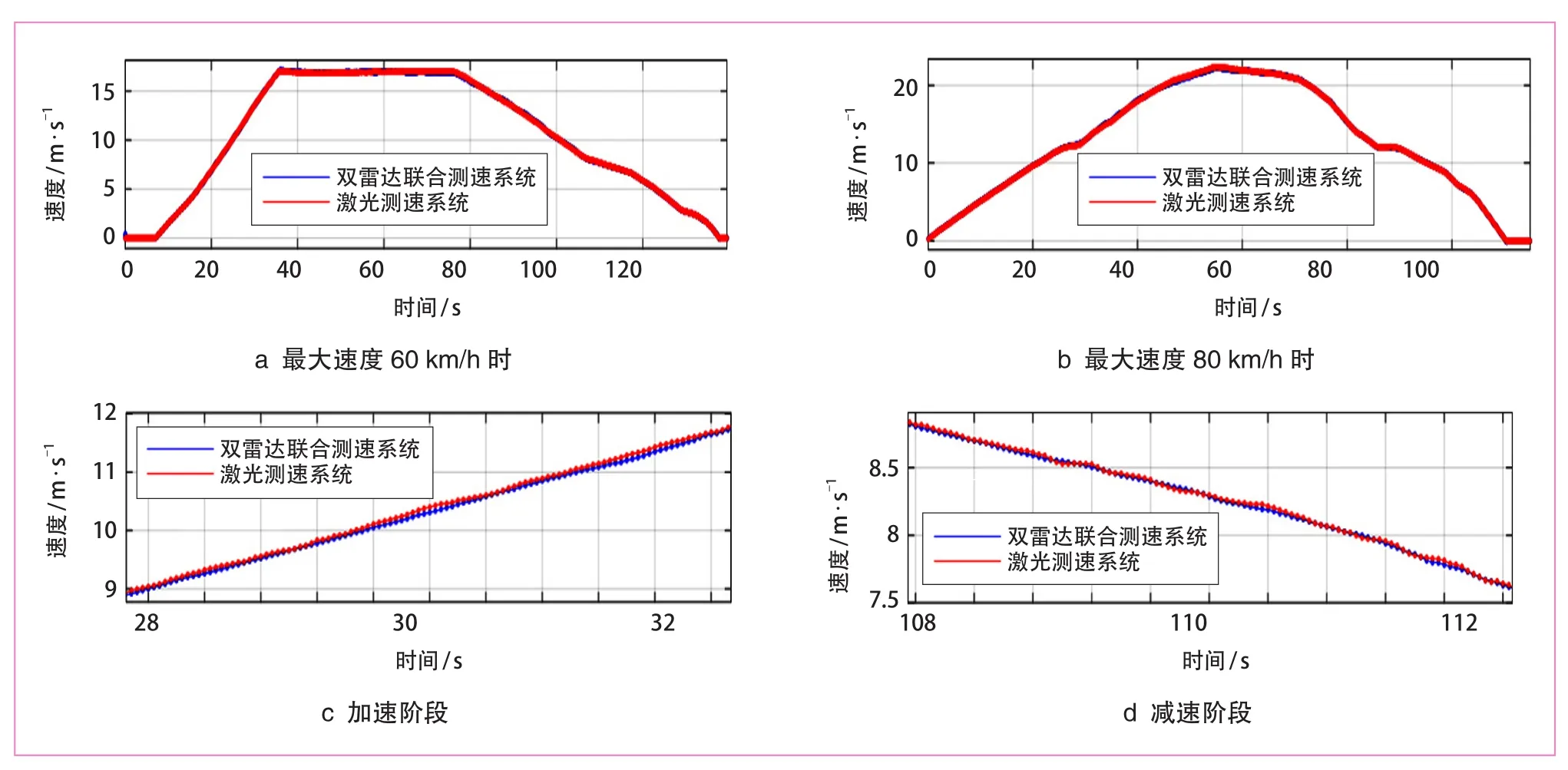
图7 双雷达联合测速系统与激光测速系统测量结果对比
6 结语
本文创新性地设计双雷达联合测速系统,并通过高性能高集成硬件电路实现系统的优化,为实现基于雷达探测技术的高精度、高可靠度列车测速提供了一种新的解决方案。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
中国交通信息化(2017年10期)2017-06-06
中外医疗(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
火控雷达技术(2016年3期)2016-02-06
电子器件(2015年5期)2015-12-29
百科探秘·航空航天(2015年4期)2015-11-07
