
车载LiDAR技术在道路改扩建中的应用
2021-03-23 06:53王力力
资源导刊(信息化测绘) 2021年2期
王力力
(河南省测绘地理信息局信息中心,河南 郑州 450003)
1 引言
道路交通行业是国民经济的基础性、服务性产业,国民经济的发展和社会进步的推动需要靠快速、便捷的道路交通网络来支撑。当前,交通运输的快速发展要求不断提高道路使用性能以满足交通量,但由于设计者对路面结构认识不到位、对交通量预测不准确等原因,部分新建道路使用初期就出现了结构性破坏,或是没有达到设计年限就出现交通饱和现象,无法满足社会经济发展的要求。因此,需要对现有道路进行改建,改善其承载能力及行车舒适性,或是扩建交通量饱和的道路,使其适应社会经济发展的需要。
车载LiDAR 移动测量技术已成为当今测绘界比较前沿的技术之一,于20 世纪90 年代开始逐步发展起来[1],是一种快速获取空间数据的技术手段,被广泛运用到数字城市、基础测绘、城市规划、交通等领域[2-3]。对其关键技术进行研究,快速获取高精度地理信息数据,可促进城市发展和经济建设,具有广阔的发展空间[4]。国内学者张熙等将车载激光扫描技术应用于西藏那曲地区的317 线公路改扩建项目,发挥了车载LiDAR 技术不受空域、天气条件和海拔限制的特点[5];黄文元等将常规测量方法和车载LiDAR 扫描技术同时用于公路改扩建工程勘测实验,分别对不同方法获得的结果统计水平精度和高程精度,分析提出了车载LiDAR 技术应用于公路改扩建工程的优势[6]。上述研究表明车载LiDAR 技术在道路改扩建中的应用优势明显。本文以车载LiDAR系统在道路改扩建中的应用实践为背景,依托京沪高速公路莱新段改扩建项目,介绍了利用车载LiDAR 系统采集道路数据的工作方法和技术要点。该系统获取道路点云信息丰富、影像质量高,数据成果满足相关规范要求,显著提高了生产效率。
2 车载系统介绍
2.1 系统组成
研究采用的SSW 车载激光测量系统,是首都师范大学与北京四维远见信息技术有限公司联合研制的高科技动态坐标测量系统,如图1 所示,主要由坐标测量、姿态测量、距离测量和影像采集四部分组成。对应的传感器分别是激光扫描仪、POS 系统、里程计和全景相机,系统数据采集装备参数如表1 所示。

图1 SSW车载激光扫描系统
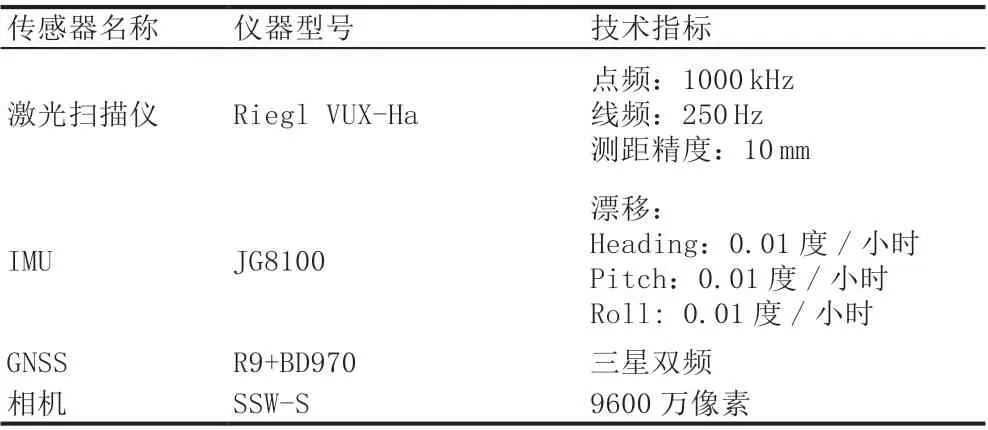
表1 系统数据采集装备参数
2.2 系统工作原理
车载激光建模测量系统通过GNSS 系统将360°激光扫描仪、惯性陀螺系统、相机和里程计统一为同一时间,使得系统每时刻数据协同一致。里程计、GNSS和惯性导航系统采集的数据用来进行组合导航,获取系统每时刻的姿态和位置数据[7]。通过激光扫描仪和相机来获取目标地物的坐标和纹理信息,结合姿态数据融合生成带有绝对坐标的点云数据[8]。
3 道路三维点云数据采集技术方案
3.1 技术方案

图2 方案路线图
车载LiDAR 扫描技术应用于道路改扩建项目的基础是能够获得高精度点云,本文在大量实验的基础上,提出了一套获取高精度点云的方案,如图2 所示,主要包括数据采集、平面和高程纠正、滤波、特征地物提取、道路三维模型及纵横断面DEM 构建等。并采用水准仪、全站仪或GNSS RTK 精确测量其坐标值。 (2)数据采集:①调试设备。确保系统各硬件接口和指示器正常,根据现场状况调整相机以及激光等设备的参数,如光圈、激光功率、转速等。②架设GNSS 基站。根据扫描路线的长度和GNSS 基站的覆盖半径来选取基站架设位置,相邻基站间距应不超过覆盖半径的两倍,且需将道路完全覆盖。③采集数据。根据设定好的行驶计划和实时道路情况机动进行,尽量匀速慢行,以求获取较细致的激光点云数据。
(3)点云数据解算:首先,用GNSS 和IMU 对观测数据进行组合导航计算,获取IMU 精确位置和姿态数据;其次,将激光扫描的原始极坐标数据转换为激光扫描坐标系的平面坐标数据;再次,用激光扫描仪和IMU 间的相对旋转矩阵,将激光平面坐标数据转换为IMU 坐标系下的平面坐标;最后,用IMU 的位置和姿态数据将IMU坐标系下的点云数据转换为地理坐标系。 (4)数据质量检查:对已布设的控制场进行精细扫描,在采集的控制场点云数据中找出空间位置与已测控制点相对应的激光点,将其坐标与控制点的实测坐标进行比对并计算误差;或者在采集路段选取易于分辨的特征点作为检查点,并用测量仪器量测其坐标值,与采集数据中的对应激光点坐标进行比对并计算误差,最后制作精度报告。
4 工程实例
3.2 采集和处理流程
车载LiDAR 系统公路点云数据的采集分为四个阶段:任务规划、数据采集、点云数据解算、数据质量检查[9]。
(1)任务规划:①规划设计资料准备。收集测区的基础控制测量数据、地形地势、道路形态、天气状况等信息。根据测区的航摄或卫星影像图,规划采集路线。②制订行驶计划。根据道路类型(如高速公路、高架、桥梁、隧道)和边坡特征(如洼地、平坡、断壁)制订车载平台行驶计划。为保证采集精度,需进行双向数据采集,分别处理。③布设控制场。在测区开阔、遮挡物少的地方,架设基准站进行测量。控制场选定后,选取一定数量具有明显特征或标记的点位作为控制点,
4.1 测区概况
项目为京沪高速公路莱新段( 莱芜枢纽K477+442.5 至新泰枢纽K534+895)、京沪高速蒙阴段(新泰枢纽K534+895 至竹园枢纽K601+340)主干道约130 公里。匝道互通共5 个,分别为莱芜枢纽、莱芜东枢纽、钢城互通、新泰东互通、新泰枢纽,如图3 所示,项目利用SSW 车载激光扫描系统进行测量,为京沪高速公路改扩建设计提供基础测绘数据。
4.2 数据获取
根据项目设计技术要求调试 设备,设置参数,单个基站控制半径为10 公里,采用双基站作业模式,保证数据采集精度。LiDAR 数据采集时,车辆行驶速度不超过60 公里,在路政管理车辆同向跟随、每车道限速并距离采集工作车约300 米的情况下进行数据扫描采集;本次数据采集分四次完成。从莱芜枢纽向竹园枢纽立交方向测量。按照既定技术方案,对测区改扩建高速公路进行往返扫描,获得车载点云数据。
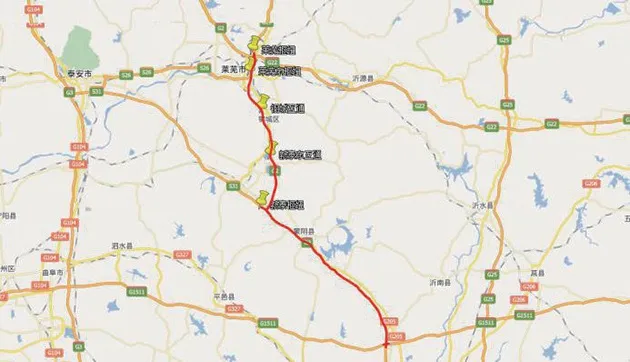
图3 采集路线图
4.3 数据处理
4.3.1 生成点云数据
根据获取的GNSS、IMU 和里程计数据进行组合导航解算,查看线路轨迹数据。利用组合导航结果计算生成点云数据,并进行数据质量初步检查。经过检查,本次数据内部质量较高。系统采集局部效果如图4 所示。

图4 系统采集局部效果图
4.3.2 点云纠正与精度分析
(1)点云平面纠正:为保障点云内符合精度,对本次数据质量进行预评估,采用往返扫平差、外测控制检查的方案。平面控制采用RTK 采集,RTK平面精度一般为3 cm。扫描数据平面检查点个数为785 个,点位误差分布为0.000 ~0.050 米618个, 占78.7%;0.050 ~0.099 米154 个, 占19.6% ;0.100 ~0.13 米13 个,占1.7%。去除粗差后,点位中误差为±0.041 m,满足工程要求。点云数据平面纠正前后效果如图5 所示。
(2)点云高程纠正:每200 米在高程点对应位置采集点云点,形成高程纠正点对,对点云进行纠正。点云纠正完成后,在每两控制点中间位置(精度最差处)采集一组同名点用作检查点,统计成果的高程精度。本次扫描高程检查点数量为879 个。高程误差分布 :0.000 ~0.019 米825 个,占93.8% ;0.020 ~0.043 米54 个,占6.2%。中误差:Mh=±0.012 m,满足工程要求。高程纠正前后对比如图6 所示。

图5 点云数据平面改正前后对比
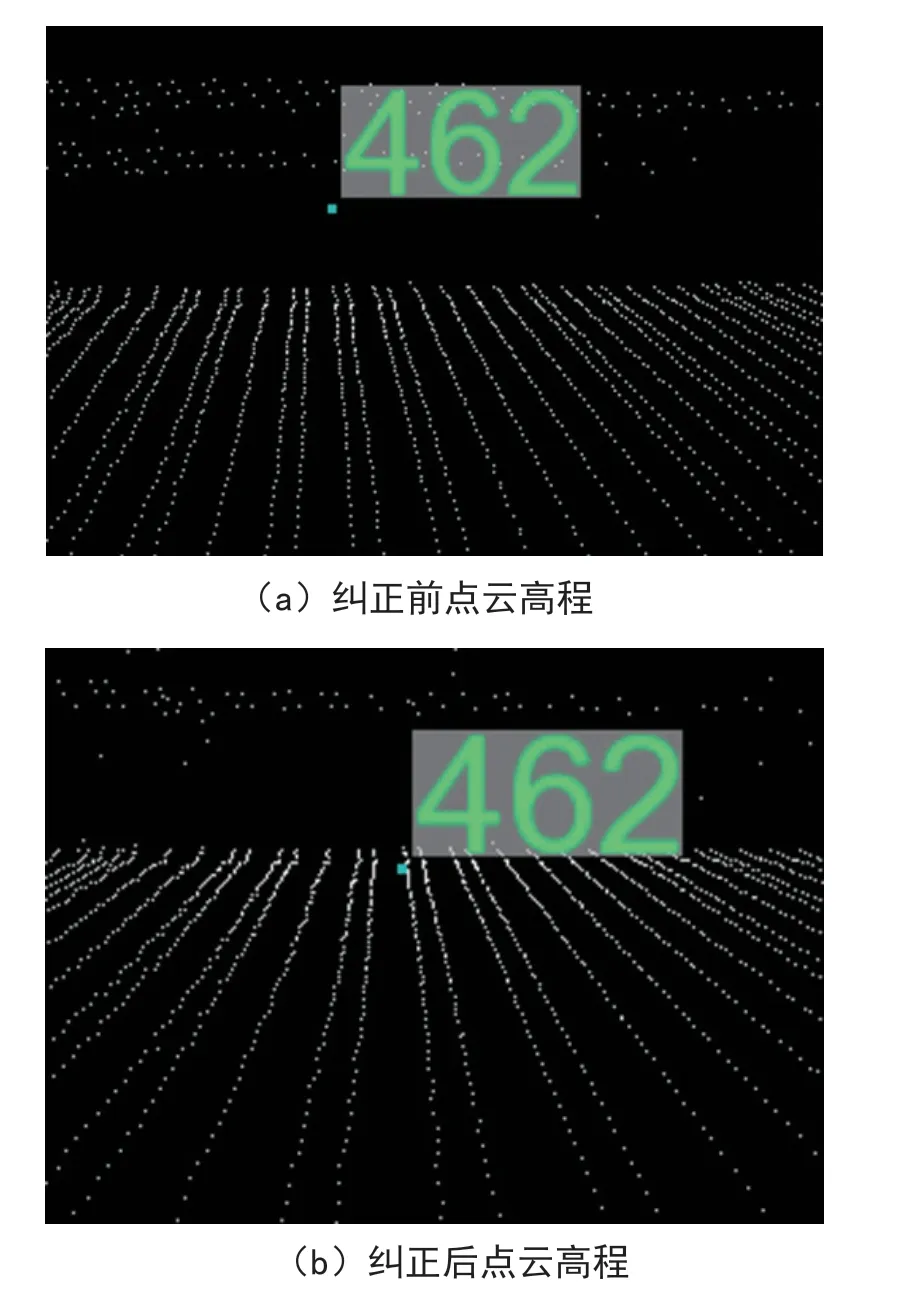
图6 点云数据高程改正前后对比
4.3.3 特征边线提取
道路面标志包括分道线、路面文字符号、斑马线等道路模型的重要组成部分。对于道路面标志的提取,利用移动窗口法,找出路面边界,缩小运算范围;再通过对点云高差、相邻点云灰度差值、动态网格点云密度、激光扫描强度值和强度差值的一系列筛选,基本完成对目标点云的提取;最后,根据局部点云间的距离实行聚类归纳,剔除杂点,得到较为清晰准确的路面标志线点云。自动矢量提取效果如图7 所示。内业自动处理无法采集到的特征点数据,需人工补测。

图7 自动矢量提取成果
5 结语
通过工程实践,本文详细分析了车载激光扫描系统在高速公路改扩建项目中的应用,并进行了精度评定。结果表明,基于车载LiDAR 系统的道路勘测技术可以大大提高道路改扩建测量工程的效率,不但为类似的工程实践提供了借鉴,同时也拓展了车载LiDAR技术的应用领域。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
汽车实用技术(2022年10期)2022-06-09
军民两用技术与产品(2022年1期)2022-06-01
一重技术(2021年5期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
汽车维修技师(2019年7期)2020-01-16
汽车维修与保养(2019年3期)2019-06-19
消费导刊(2017年8期)2018-01-18
现代兵器(2017年4期)2017-06-02
