基于东方蝼蛄爪趾的仿生旋耕刀设计与试验
2021-03-20 08:01肖茂华汪开鑫王伟臣
农业机械学报 2021年2期
肖茂华 汪开鑫 杨 望 王伟臣 江 丰
(1.南京农业大学工学院, 南京 210031; 2.广西大学机械工程学院, 南宁 530004)
0 引言
旋耕刀是一种基于铣切原理加工的土壤耕作机械[1-2]。其中,旋耕弯刀是旋耕机的主要部件[3-5],其性能直接影响整个旋耕机的作业质量和能耗水平。为了提高旋耕机工作效率,旋耕刀几何结构优化设计一直是国内外研究的重点。郝建军等[6]设计了一种楔形减阻旋耕刀,田间试验表明,在相同工况下,楔形减阻旋耕刀的平均扭矩较国标旋耕刀降低11.35%,平均功耗较国标旋耕刀降低9.29%,碎土率提高4%。GODWIN[7]在研究土壤耕具作业时,获得不同宽窄齿的耕具在土壤切削过程中所受的水平阻力变化规律。
近些年,随着仿生学在农业领域的应用,土壤耕具作业时阻力大、能耗高的问题得到了一定的缓解。杨玉婉等[8]研究了前肢手掌的多趾组合结构特征,设计了具有鼹鼠多趾结构特征的仿生旋耕刀,通过田间试验对比表明,在不同前进速度和弯刀转速情况下,旋耕机整机功耗平均降低了约20%左右。俞杰[9]以安哥拉兔爪趾为原型设计了仿生旋耕刀,通过试验得出,与传统旋耕刀相比其工作时降阻率达到了17.8%,最大扭矩也降低了44.9 N·m。东方蝼蛄俗称“土仙”,挖土能力极强,前足特化为钉耙状,能够在一夜之间挖掘出2 000~3 000 mm长的洞穴[10]。目前,已有研究学者将东方蝼蛄前爪趾应用于深松铲、触土试件以及挖掘机仿生斗齿的设计中[11-13]。本文基于东方蝼蛄前足爪趾轮廓曲线,设计具有仿生结构特征的旋耕刀,借助仿真软件进行离散元仿真分析,然后进行室内土槽试验验证,分析国标旋耕刀与仿生旋耕刀扭矩、三向阻力的变化规律,以期为旋耕刀的减阻降耗提供借鉴。
1 仿生旋耕刀设计
1.1 前足爪趾轮廓曲线拟合
东方蝼蛄(图1a)的前足为钉耙状,具有较强的挖土性能。东方蝼蛄前足爪趾轮廓相对较为复杂,因此需要将爪趾轮廓分为上、下曲线(图1b)。通过研究上、下爪趾轮廓曲线获得东方蝼蛄前足爪趾曲线的趋势[14]。
通过逆向工程技术及软件对东方蝼蛄前足爪趾的结构进行采样和数据处理[15],将得到的爪趾轮廓曲线的点云数据代入到AutoCAD 2016中,获取爪趾轮廓曲线的X与Y坐标值数据,最后,使用曲线拟合(Curve fitting)工具箱将二维坐标数据导入到Matlab 2018。基于最小二乘法拟合东方蝼蛄4个爪趾轮廓曲线(图2),4个爪趾轮廓拟合方程均为高斯方程,方程系数如表1、2所示。
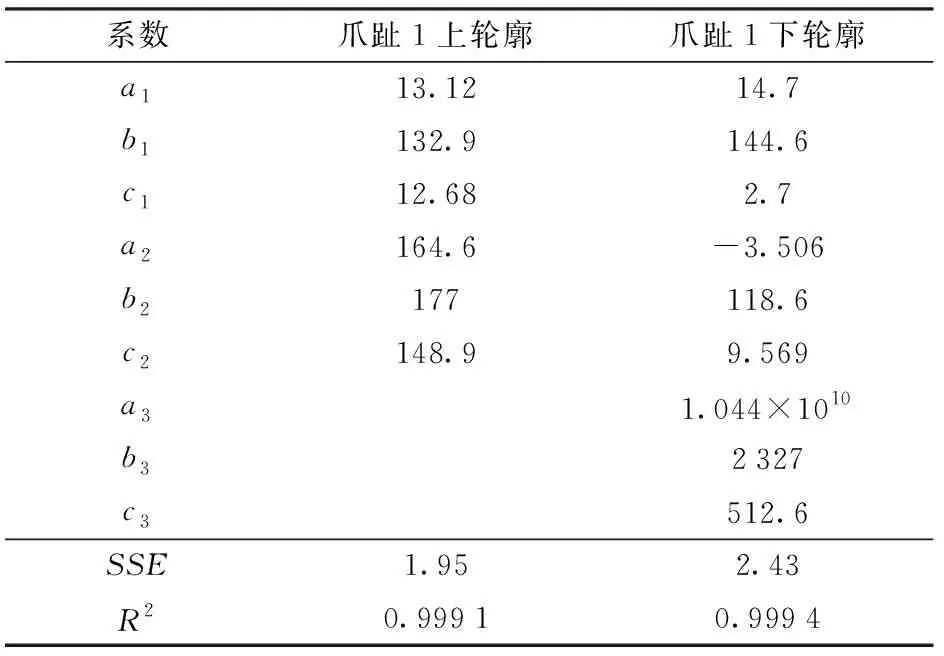
表1 东方蝼蛄前足爪趾1拟合曲线方程系数Tab.1 Fitting curve equation coefficients of the first claw toe of Gryllotalpa orientalis Burmeister
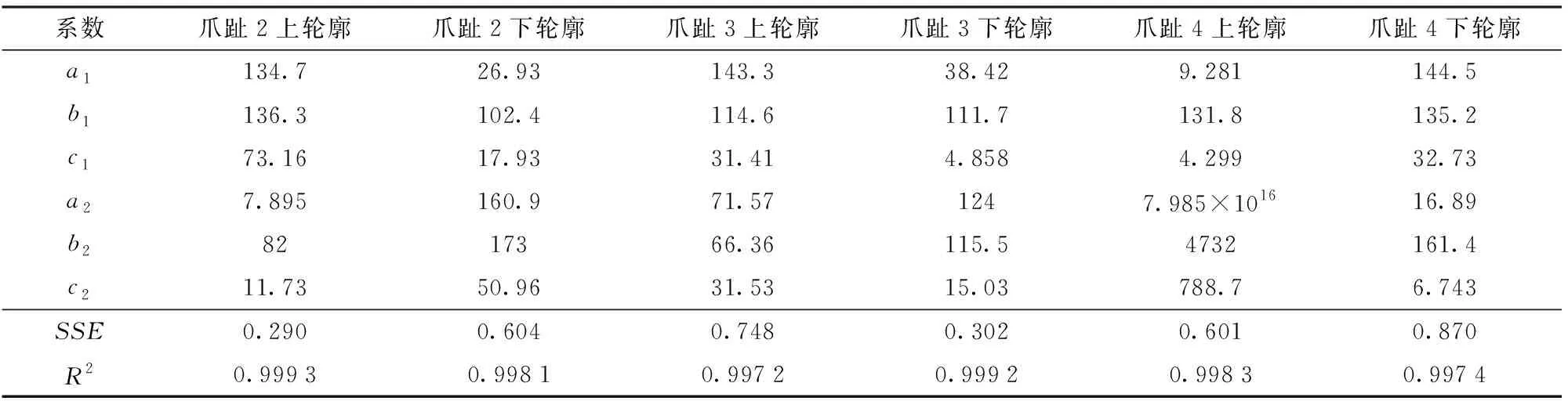
表2 东方蝼蛄前足爪趾2、3、4拟合曲线方程系数Tab.2 Fitting curve equation coefficients of the second, third and fourth claws of Gryllotalpa orientalis Burmeister
爪趾1上轮廓高斯方程为
(1)
爪趾1下轮廓高斯方程为
(2)
爪趾2、3、4的上、下轮廓高斯方程为
(3)
1.2 设计原理与过程
目前,横轴式旋耕机上采用的旋耕刀主要有弯形刀、直角刀以及凿形刀3种类型[16]。本文从弯形刀入手,旋耕弯刀是由刀柄、包含侧切刃的侧切面、过渡刃的过渡面以及正切刃的正切面4部分组成[17]。通常情况下,旋耕刀主要的工作部位是正切刃与侧切刃,而正切刃需承担碎土、翻土以及切土的作用,因此为旋耕刀上最主要的耗能工作部件[18]。
东方蝼蛄前足平行置于身体两侧并指向前方,但其爪趾向外翘起,这与旋耕刀的结构有一定的相似之处。东方蝼蛄前足挖土运动轨迹近似为具有一定弧度的轨迹曲线[19]。而旋耕刀运动轨迹是由圆周运动和直线运动所组成的摆线运动[20],两者运动轨迹存在一定的差异。通过测量20只东方蝼蛄前足与其4个爪趾长度、爪趾之间角度等信息,根据仿生设计中的比例法[21-22],结合两者运动轨迹与结构的异同性进行设计。由于东方蝼蛄前足挖土过程中存在着伸展与向外扩张两种运动,且扩张运动受力与旋耕刀侧向阻力相似,因此在采用东方蝼蛄爪趾轮廓曲线信息的同时,考虑了仿生齿形强度问题,将4个爪趾齿形的齿根长度L稍微加大,L1~L4分别为5.0、4.0、3.5、6.0 mm;减小两齿间夹角α,α1~α4分别为21°、22°、33°、42°,具体如图3所示。总体结构是依据国标旋耕刀的结构特征,将东方蝼蛄前足的爪趾1、2、3、4的轮廓曲线依次排列于正切刃与回转半径的末端边缘(图4a)。
在国标刀座式旋耕刀毛坯的基础上,仿生设计采用国标旋耕刀的回转半径R为245 mm,材质为65 Mn钢。根据国家标准GB/T 5669—2008《旋耕机械 刀和刀座》[23],刀身热处理硬度为48~54 HRC;刀柄热处理硬度为38~45 HRC,旋耕刀刀身部分金相组织为回火马氏;刀柄部分为回火屈氏体,最后旋耕刀的表面无裂纹,实物如图4b所示。
2 离散元仿真分析
采用EDEM 2018软件对国标与仿生旋耕刀这2种刀片的耕作过程进行仿真试验,对比2种旋耕刀所受的扭矩和三向阻力情况。
2.1 土壤颗粒接触模型
采用Hertz-Mindlin with Bonding模型,此接触模型在粘结土壤破碎的过程中具有很好的应用效果,能在土壤颗粒中产生一定的约束,这种土壤间的约束能对土壤产生切向和法向的运动阻力,直到颗粒彼此间的力达到破坏约束作用时,土壤颗粒间才会产生作用[24-26]。外界对土壤的法向粘结力Fn、法向力矩Mn、切向粘结力Fτ和切向力矩Mτ计算式为
δFn=-vnSnAδt
(4)
δFτ=-vτSτAδt
(5)
δMn=-ωnSnJδt
(6)
(7)
式中A——接触区域面积,m2
Rb——粘结半径,mm
J——截面积惯性矩,m4
Sn、Sτ——颗粒法向、切向粘结刚度,N/m3
vn、vτ——颗粒法向、切向速度,m/s
ωn、ωτ——颗粒法向、切向角速度,rad/s
δt——时间步长,s
当某一时刻外界作用力超过使土壤粘结的最大切向与法向作用力时,粘结会被破坏,土壤颗粒之间相互作用力将不会受到粘结作用的约束。定义条件为
(8)
(9)
式中δmax——法向临界应力,Pa
τmax——切向临界应力,Pa
2.2 土壤模型参数
EDEM离散元仿真基本原理是用球模拟土壤颗粒模型。目前,大多数研究者采用直径小于10 mm的球体作为土壤模型[27-32]。为了兼顾计算机分析时间与仿真效果,仿真采用直径8 mm的球体来作为土壤颗粒。采用的Hertz-Mindlin with Bonding模型中存在5个主要粘结参数,分别为:颗粒法向粘结刚度Sn、切向粘结刚度Sτ;粘结颗粒法向临界应力δmax、切向临界应力τmax以及颗粒粘结半径Rb。在土壤颗粒半径确定的情况下,通过材料密度与土壤含水率可计算得粘结半径Rb[33]。参考该模型应用于土壤耕作方面的研究成果[24-26, 31-32],其余4个粘结参数、各个材料之间的静摩擦因数、动摩擦因数以及恢复系数如表3所示。
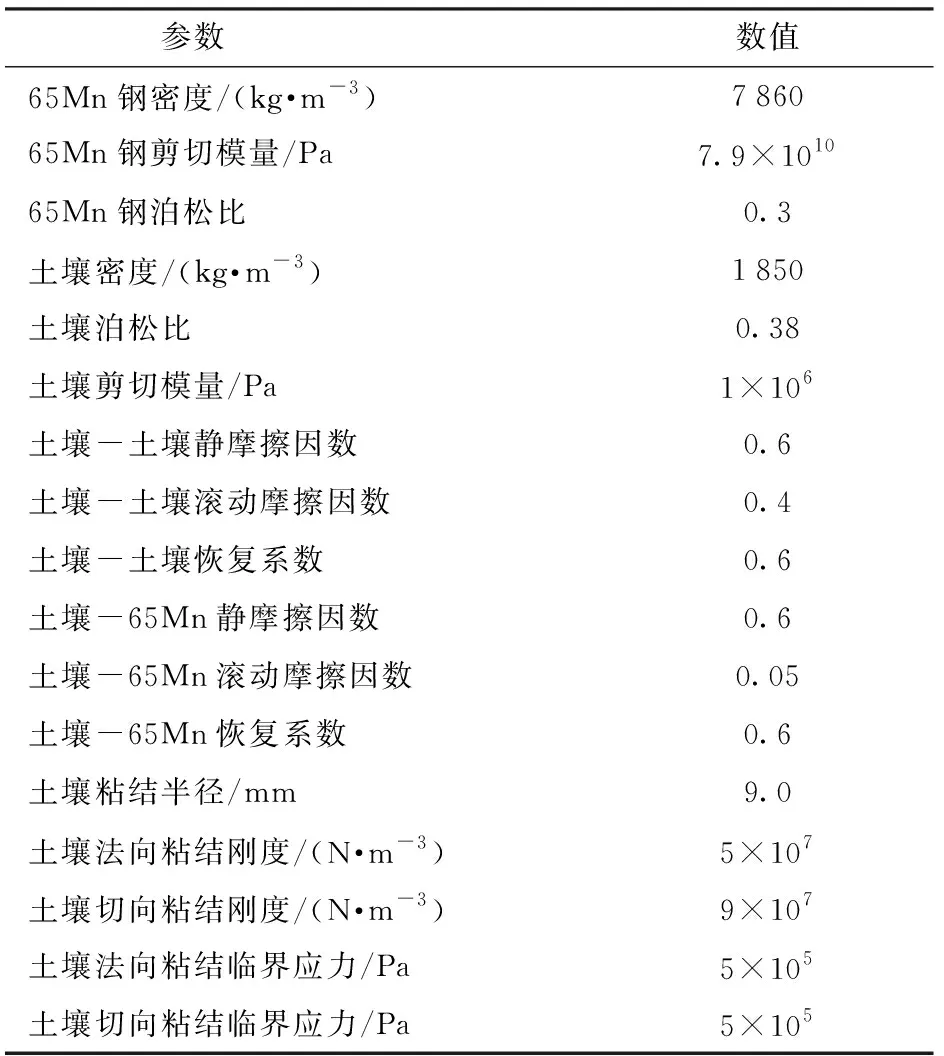
表3 材料性能参数与接触参数Tab.3 Material performance parameters and contact parameters
2.3 运动仿真设计
将在SolidWorks 2018中建立的国标与仿生旋耕刀三维模型导入EDEM 2018软件,构建长×宽×高为900 mm×300 mm×500 mm的土壤-旋耕刀相互作用模型(图5),然后在土槽仿真模型内生成24 000个直径为8 mm的土壤颗粒模型。仿真分析中旋耕机刀轴转速设定为150、200、250 r/min;前进速度为0.5 m/s;耕深为100 mm。整个过程分为2部分:0~0.6 s在土槽仿真模型内生成土壤模型;0.6~2 s旋耕刀分别以前进速度0.5 m/s以及刀轴转速150、200、250 r/min与土壤模型进行切削运动,仿真数据保存间隔为0.001 s,共6组仿真试验,在分析板块获取试验结果,采用0.6~2.0 s内仿真数据,进行2种旋耕刀所受扭矩以及三向阻力的分析。
3 室内土槽旋耕试验
2020年10月在南京农业大学浦口校区农机实习中心的土槽试验台车上进行国标与仿生旋耕刀扭矩采集试验。土槽内土壤为黏土(质量分数分别为淤泥47%、黏土42%和沙11%),取自南京市永宁镇[34]。土壤经过调湿、夯实后,控制土壤平均含水率为16%,平均硬度为3.21×105Pa,且每次试验时土壤参数保持一致。在对整个土槽试验台车系统检查后,进行旋耕试验。
3.1 试验装置
土槽试验台车主要由电机部分、试验台车、行走导轨、土槽、旋耕机、传动系统、液压系统部分、三点悬挂机构、各种传感器、数据采集系统以及计算机等部分组成。土槽长×宽为24 000 mm×3 000 mm。土槽试验台车长×宽×高为2 500 mm×3 000 mm×2 000 mm,其结构简图如图6所示。
3.2 土槽试验
试验采用江苏清淮机械有限公司生产的旋耕机,总共安装24把旋耕刀。土槽试验台车旋耕行走长度为18 m,旋耕机采用正转且刀轴转速设定为150、200、250 r/min 3挡,耕深保持100 mm,前进速度恒为0.5 m/s,分别测量2种旋耕刀在试验过程中刀轴所受的扭矩。试验现场如图7所示。
4 试验结果与分析
4.1 旋耕刀扭矩分析
仿真过程中旋耕刀在工作时总体上可分为4个过程。过程1,在旋耕刀未进入土壤时所受扭矩为0,在刀轴转动下,侧切刃进入纵切状态,随着入土深度增加,扭矩增大,接着主切刃进入横切状态,在主、侧切刃与土壤共同作用时,扭矩出现骤然增加。过程2,当旋耕刀到达最大耕深时,扭矩达到最大值。过程3,旋耕刀越过最大耕深后,主、侧切刃逐渐退出土层,扭矩慢慢减小。过程4,当主切刃完全退出土层时,在此过程中扭矩逐渐减小至0。
根据运动仿真分析得到2种旋耕刀所受扭矩的变化规律如图8所示。3种刀轴转速下国标旋耕刀所受的平均扭矩都比仿生旋耕刀高,刀轴转速150 r/min时,分别为6.28、5.72 N·m,下降了8.87%;刀轴转速200 r/min时,分别为7.75、7.32 N·m,下降了5.47%;当刀轴转速达到250 r/min时,分别为11.03、10.49 N·m,下降了4.89%。由图8可知,随着刀轴转速的增加,旋耕刀所受到的最大扭矩会逐渐变大。旋耕刀所受扭矩越大,所需功耗也越大,两者之间呈正比关系[35]。
理想状态下,土槽试验台车输出扭矩等于旋耕机上24片旋耕刀所受的扭矩总和。但实际试验中会出现各传动机构间的摩擦以及其他部件产生扭矩。本文中将每次试验所产生的额外扭矩都近似为相等,故土槽试验台车输出扭矩等于所有旋耕刀所受的扭矩总和[32]。土槽试验得到的平均扭矩信息如表4所示。试验得出,在土槽试验台车前进速度和耕深保持一定时,3种刀轴转速下仿生旋耕刀受到的平均扭矩都比国标旋耕刀小,分别降低了10.53%、4.46%、3.49%。通过将土槽试验台车输出总扭矩除以旋耕刀数目近似得出每个刀片所受到扭矩。将仿生旋耕刀试验与仿真平均扭矩结果进行对比分析,如图9所示,2条曲线的相关系数为0.997且最大相对误差为13.23%,旋耕刀所受的扭矩仿真值与试验值变化趋势相似,能够较准确地反映旋耕机的功耗变化规律,但是由于土槽试验受土壤中石沙、传动系统摩擦以及土槽试验台车前进阻力等因素的影响[36],其扭矩试验值比仿真值大。

表4 土槽试验中国标与仿生旋耕刀所受平均扭矩Tab.4 Average torque of national standard and bionic rotary blade in soil bin test
4.2 旋耕刀三向阻力分析
在旋耕作业中,定义两种旋耕刀三向阻力方向分别为:水平作用力方向为X向、垂直作用力方向为Y向、侧向作用力方向为Z向。则旋耕刀在土壤耕作中所受的三向阻力如图10所示。图中v为旋耕刀前进速度;ω为旋耕刀刀轴转速;R为旋耕刀回转半径;Fx、Fy、Fz分别为旋耕刀所受的水平阻力、垂直阻力与侧向阻力;M为驱动力矩。
通过仿真试验得到国标与仿生旋耕刀所受到的三向阻力变化规律如图11所示,在3种刀轴转速下两种旋耕刀旋转1圈,其水平阻力Fx一直是正值,因为刀轴旋转方向与旋耕刀前进方向相同。3种刀轴转速下国标旋耕刀Fx最大值均比仿生旋耕刀大,在刀轴转速为150 r/min时,仿生旋耕刀水平阻力最大值较国标旋耕刀降低了9.91%,分别为71.45、79.31 N;在刀轴转速为200 r/min时,降低了5.78%,分别为93.55、99.29 N;在刀轴转速为250 r/min时,降低了4.95%,分别为101.00、106.26 N。垂直阻力Fy呈先正后负的变化规律,主要是旋耕刀在达到最大耕深过程中向下切土,刀片受到垂直向上的阻力,为正值;当旋耕刀从最大耕深开始出土抛送土壤时,刀片受到垂直向下的力,为负值。在刀轴转速为150 r/min时,仿生旋耕刀垂直阻力最大值较国标旋耕刀降低了9.09%,分别为53.00、58.30 N;在刀轴转速为200 r/min时,降低了9.74%,分别为58.48、64.79 N;在刀轴转速为250 r/min时,降低了6.38%,分别为70.86、75.68 N。侧向阻力Fz一直为负值且3种刀轴转速下国标旋耕刀侧向阻力最大值均比仿生旋耕刀小。
由图12可知,国标与仿生旋耕刀三向阻力最大值均随着刀轴转速的增加而升高,且仿生旋耕刀的水平阻力和垂直阻力最大值在3种刀轴转速下都比国标旋耕刀小,但侧向阻力最大值比国标旋耕刀大。
5 结论
(1)分析了东方蝼蛄前足爪趾轮廓曲线特征,拟合4个爪趾上、下轮廓曲线的高斯方程的拟合度R2均不小于0.997 2,拟合误差平方和SSE均不大于0.87。
(2)采用Hertz-Mindlin with Bonding土壤接触模型用EDEM 2018离散元软件构建了南方粘湿土壤-旋耕刀相互作用仿真模型,使用直径为8 mm的球体模拟土壤颗粒,对2种旋耕刀进行受力分析。
(3)旋耕刀仿真受力分析表明,国标旋耕刀与仿生旋耕刀水平阻力、侧向阻力和垂直阻力均随着刀轴转速的增加而增大,除侧向阻力以外,仿生旋耕刀受到的水平阻力和垂直阻力的最大值都比国标旋耕刀小。在刀轴转速为150、200、250 r/min时,仿生旋耕刀所受平均扭矩均比国标旋耕刀小,分别降低了8.87%、5.47%、4.89%。
(4)土槽扭矩对比试验表明,在刀轴转速为150、200、250 r/min时,仿生旋耕刀所受平均扭矩均比国标旋耕刀小,分别降低了10.53%、4.46%、3.49%。仿生旋耕刀所受平均扭矩的仿真值与试验值变化趋势相同,均随着刀轴转速的增加而增大,2条曲线相关系数为0.997,且最大相对误差为13.23%,验证了所建立的离散元仿真模型的有效性。
猜你喜欢
建材发展导向(2021年6期)2021-06-09
华人时刊(2020年21期)2021-01-14
农民致富之友(2020年17期)2020-06-19
课外语文·中(2019年9期)2019-11-03
农民致富之友(2019年12期)2019-05-22
故事作文·低年级(2019年4期)2019-04-17
农民致富之友(2017年11期)2017-06-20
汽车与安全(2016年5期)2016-12-01
思维与智慧·上半月(2015年11期)2015-11-09
农家顾问(2014年5期)2014-06-26