复杂水质环境下基于PSO-ELM的BOD快速检测
2021-03-19 05:45崔行宁肖春艳李少华
计量学报 2021年1期
陈 颖, 崔行宁, 肖春艳, 张 杰,张 灿, 杨 惠, 李少华
(1.燕山大学 河北省测试计量技术及仪器重点实验室,河北 秦皇岛 066004; 2.河南理工大学资源与环境学院,河南 焦作 454000; 3.河北先河环保科技股份有限公司,河北 石家庄 050000)
1 引 言
近年来,人们对于海洋资源的开发以及将大量的工业废水、生活污水排入近海海水中,海水水质正受到越来越多的污染,而这些污水中存在大量的有机污染物,破坏了水体的功能[1,2]。因此,海水水质检测受到人们的高度关注。生化需氧量(biochemical oxygen demand,BOD)是反应水体被有机物污染程度的重要指标,它表示水中有机物在微生物生化作用下氧化分解,在其无机化或气体化时所消耗水中溶解氧的总量[3~5]。
目前普遍采用的方法是标准稀释测定法,即将样品置于(20±1)℃的环境中培养5 d,分别测定培养前后的溶解氧,二者之差即为BOD值,其单位以mg·L-1表示[6]。该方法重复性差、操作较为复杂,不能及时反映水质情况[7]。多年来,人们为了达到及时监测水质污染程度的目的,一直在寻找快速测定BOD的方法。在BOD生物传感器上,刘长宇等[8]制备原位培养的微生物膜反应器作为生物降解有机物传感器,性能稳定、准确可靠,但易受到环境因素的影响;Khor等[9]建立了一种以铁氰化物为介导的BOD生物传感器,能够在很高的扫描速率下实现稳定测量;Zaitseva等[10]使用地杆菌制备微生物膜。在软测量方面,乔俊飞等[11,12]提出基于敏感度分析法的自组织随机权神经网络预测方法和以PSO算法优化的回声状态网络的预测方法,结果表明,两种软测量方法对水质参数BOD的预测精度高、实时性好,但计算较为复杂;Heddam等[13]使用广义回归神经网络预测污水处理厂出水生化需氧量,取得了不错的效果。
本文以污染海水为微生物源,以螺旋玻璃管内壁为基底制备微生物膜反应器,并搭建BOD快速检测系统;以BOD标准溶液建立BOD计算模型,然后使用检测系统对实际水样进行测量,并将结果与BOD5法进行对比;为消除海水水质复环境参数的干扰,本文将以粒子群优化算法(particle swarm optimization,PSO)优化的极限学习机(extreme learning machine,ELM)算法建立检测系统测量的BOD值与水质参数的关系模型,得出最终的BOD值。
2 实验部分
2.1 仪器与试剂
Lab UIP微量蠕动泵,DO530溶解氧传感器,德国Brand数字可调移液器,葡萄糖、谷氨酸(分析纯),磷酸二氢钾,磷酸氢二钠(分析纯)。
2.2 微生物膜反应器的制备
实验所用微生物膜反应器如图1所示,其以污染海域海水作为微生物源,以蛋白胨等有机物为培养源,并以螺旋玻璃管内壁为基底进行微生物膜培养。微生物逐渐吸附、繁殖在玻璃管内壁表面形成微生物膜。在制备的过程中,以4 h为时间间隔,通过测量其对葡萄糖-谷氨酸溶液的电流响应来估计微生物膜的形成的状态。随着培养时间的增加,电流信号逐渐减小的过程表明微生物膜逐渐形成的过程。当连续的2个时间间隔内的电流信号没有进一步降低时,表明微生物膜已经成形,可终止培养过程。微生物膜反应器与电极型微生物传感器相比,增大了微生物膜的表面积,有利于微生物进行充分的生化反应。

图1 微生物膜反应器实物图
经过对微生物膜反应器工作环境的选择与优化,测量时需在保持(30±0.5)℃的恒温,缓冲溶液为人工海水且pH值为7.0,流通管路的流速为2 mL/min的环境中。在检测过程中,当水样未通过反应器时,水样中的溶解氧处于平衡状态,溶解氧传感器输出恒定电流值I0;当通入水样后,水样中的有机物被微生物膜氧化和吸收,微生物呼吸活性增强,溶解氧含量减少,当再次达到平衡状态时输出的恒定电流值为I1;以2次恒定电流的差值ΔI=I1-I0与标准样品比较,得出水样的BOD值。
2.3 实验装置
基于培养好的微生物膜反应器,搭建海水BOD检测系统如图2所示。系统主要包括进液控制单元、检测单元、恒温系统、数据采集与处理单元。进液控制单元包括控制面板、电磁阀、蠕动泵,实现标准溶液和检测水样的自动进液和水路的流通。检测单元包括样品池、微生物膜反应器以及溶解氧传感器。为保证微生物膜的最佳活性,将检测单元置于恒温水浴环境中。恒温水浴内含进水口、加热器、排废口等配件,分别用于水样的采集、加热、排废。信号采集与处理单元主要包括电流信号采集器、上位机,完成数据的采集与处理工作。

图2 快速检测系统结构示意图
2.4 标准曲线的标定
在实际水样检测时,需将电信号差值与标准样品进行对比得出水样BOD值,因此应进行标准曲线的标定。标定的标准溶液配置过程如下:准确称取磷酸二氢钾68 g和磷酸氢二钠134 g溶入1 L蒸馏水中,得到缓冲溶液;持续向缓冲溶液中加入蒸馏水,将其稀释成0.005 mol·L-1的清洗液;将烘干的葡萄糖和谷氨酸各1.705 g加入到清洗溶液中并不断稀释成浓度为1,2,3,4,5,8,11,14,17,20 mg·L-1的标准溶液。使用检测系统对每个浓度标准溶液进行10次测量取平均值,绘制系统对标准溶液的响应曲线。响应曲线如图3所示。

图3 BOD标准溶液响应曲线
2.5 实际水样测试与分析
以秦皇岛近海海域多采样点(碧螺塔、老虎石、鸽子窝、北戴河新区、洋河口)的海水为测试水样,使用快速检测系统进行多次测量并取其平均值,检测系统检测时间为35 min。快速检测系统测量结果与BOD5法的实际水样测量结果如表1所示。从测量结果可以看到,快速检测系统与BOD5法相比虽缩短了时间,但测量结果存在较大的相对误差。
分析其原因:一方面检测系统受传感器精度和灵敏度的限制;另一方面是因为水样中的环境复杂,某些环境参数影响了微生物膜反应器中微生物的活性。因此需将环境影响因素考虑在内,采用一定的数据处理方法,进一步消除复杂环境因素的影响,提高检测系统的测量准确性。
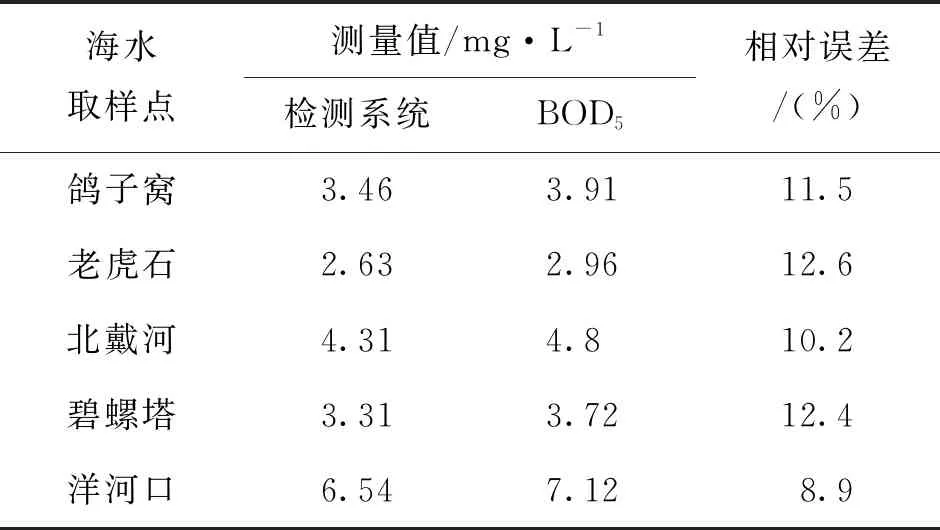
表1 实际水样测量结果
3 基于PSO优化的ELM算法
3.1 ELM算法
ELM算法是一种基于前馈神经网络的机器学习算法,其隐含层节点参数可以人为或者随机地设定,学习过程中不需要调整,仅需计算输出权重[14]。与传统的神经网络相比,ELM的学习精度更高,学习速度更快,因此ELM得到越来越多的运用。
假设有N个任意的样本(Xi,ti),其中Xi=[xi1,xi2,…,xin]T∈Rn,ti=[ti1,ti2,…,tim]T∈Rm。可以将含有L个隐层结点的单隐层神经网络表示为:
(1)
式中:Wi=[wi,1,wi,2,…,wi,n]T为输入权重;βi为输出权重;g(x)为激励函数;bi为第i个隐层单元的偏差;yj为网络的输出值。
ELM的学习目标是使得输出的误差最小,表示为:
(2)
即存在βi,bi和Wi,使得:
(3)
式(3)可以使用矩阵表示为:Hβ=T,其中H为隐层节点的输出矩阵,β为输出权值,T为期望输出。

(4)
(5)
(6)
由式(6)可求得H×β=T的最小二乘解,并且可以确定输出权重β。
(7)
式中H†为矩阵H的Moore-Penrose广义逆矩阵。
根据ELM算法的原理可知,其输出层连接权值W和隐含层神经元阈值b是随机设定的,使得隐含层节点的作用变小,造成ELM的预测误差变大,如果要达到理想的精度需设置更多的隐含层节点。
3.2 PSO优化算法
PSO优化算法是一种基于种群的智能优化算法,其基本思想是种群中的个体之间通过信息共享和互相协作来寻找最优解[15]。在一个种群中,每个个体称为一个粒子,每个粒子在D维的搜索空间中都具有一个速度向量v和位置向量p,在迭代过程中,每个粒子根据其飞行经验和最优粒子的经验不断进行迭代更新其位置和速度,当满足终止条件时停止迭代,最终使整个种群中的粒子都趋于全局最优解。
设在D维目标搜索空间中,初始种群由m个种群粒子组成,其中,粒子的位置向量为pi=(pi1,pi2,…,piD),i=1,2,…,m;速度向量为vi=(vi1,vi2,…,viD),i=1,2,…,m。粒子根据式(8)和式(9)更新其位置和速度。
(8)
(9)
式中:pbest为个体局部最优位置;gbest为整个种群的全局最优位置;d表示粒子的搜索维度,d=1,2,…,D;t表示此时迭代次数,t=1,2,…,T,T为最大迭代次数;k为惯性权重;r1、r2为[0,1]之间的随机数;c1、c2为学习因子。
有关PSO的研究表明,PSO算法具有较好的全局寻优能力,运用PSO算法来优化ELM输出连接权值W和隐含层神经元阈值b,减少ELM中冗余的隐含层节点,降低ELM算法计算复杂度,能有效提高ELM的性能。
3.3 PSO-ELM算法
PSO-ELM算法的具体流程图如图4所示,在完成数据归一化、PSO和ELM参数初始化后,根据目标函数计算所有粒子的适应度,并根据式(8)和式(9)不断更新每个粒子的位置向量p和速度向量v;为提高全局搜索和局部优化能力,惯性权重W的值随迭代次数的增加线性减小;当寻找到最优值时,终止程序运行,输出最优的ELM的输出层连接权值W和隐含层神经元阈值b,完成PSO-ELM模型,用测试数据对模型进行测试。

图4 PSO-ELM算法流程图
4 数据处理与结果分析
检测系统在检测过程中受环境因素影响,检测效果与BOD5法相比误差较大。因此使用PSO-ELM算法在检测系统得到的BOD浓度值的基础上,对水质数据进行神经网络学习,消除主要环境因素的干扰,进一步提高检测系统数据处理的精度。
4.1 模型结构设计
本文中PSO-ELM算法预测模型采用单隐层神经网络,具体结构如图5所示。模型的输入选取检测系统输出的BOD值以及对测量影响较大的变量,分别为pH值、浊度(SS)、氧化还原电位(ORP);实际的BOD值作为输出,隐含层激励函数选择Sigmod函数,并根据样本数量选取初始隐含层接点L的个数。
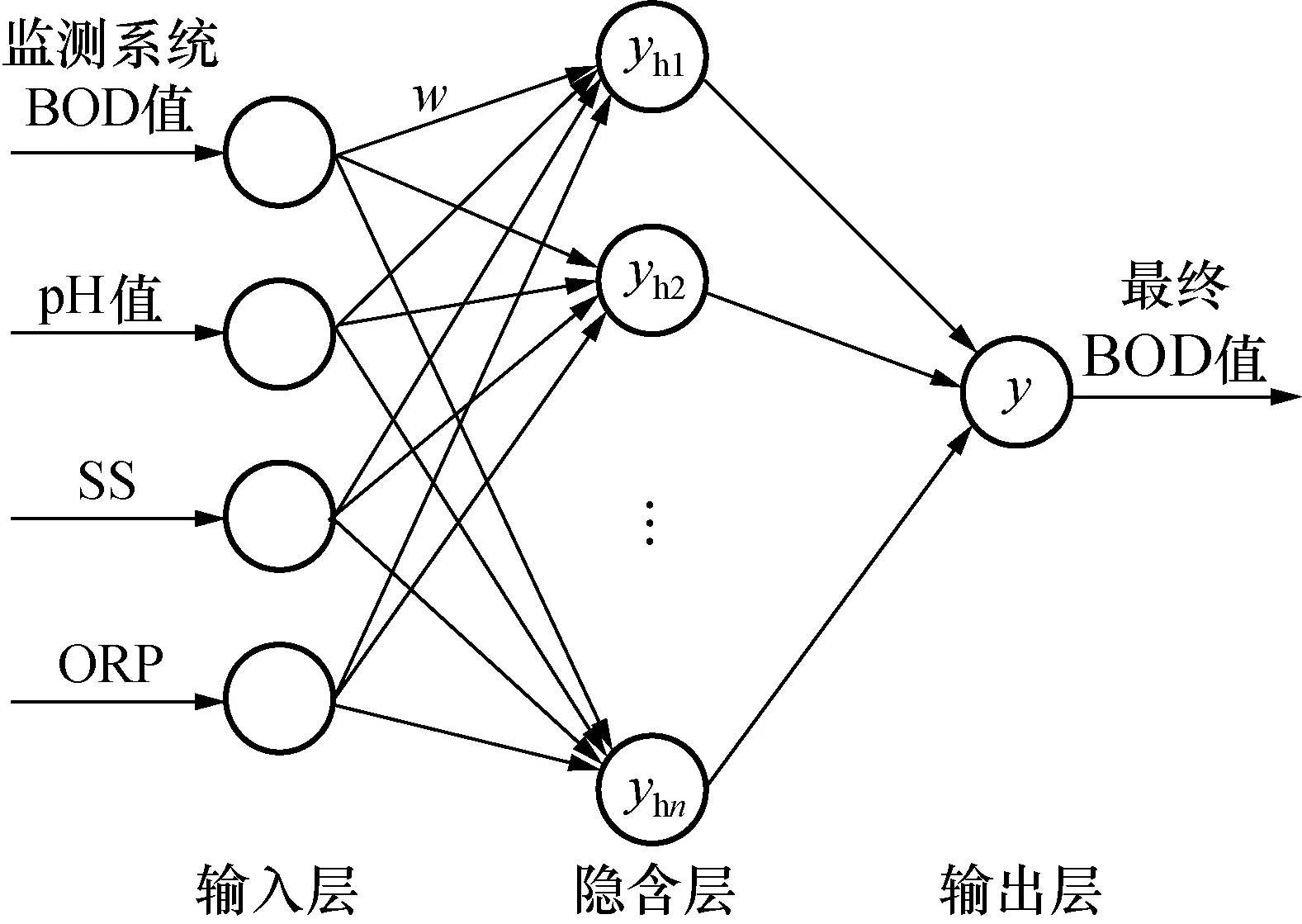
图5 PSO-ELM模型结构图
4.2 数据预处理
为了消除不同输入参数之间不同量纲的影响,需要对输入数据进行归一化处理。本文采取离差标准化法,对原始数据进行线性变化,具体的计算式为:
(10)
式中:lmin为样本数据的最小值;lmax为样本数据的最大值。
4.3 结果分析
实验中,选取真实的100组海水水样数据,随机选取70组数据用于神经网络的训练,30组数据作为网络的预测。分别使用PSO-ELM算法与传统BP神经网络算法对海水BOD浓度值进行预测,将真实数据与预测数据进行对比,并分析各个算法性能。在相同条件下,所有仿真实验重复10次取平均值。
测试结果如图6和7所示,从图中可以看出,PSO-ELM的训练过程和测试过程都与实际值达到较高的拟合精度,说明了PSO-ELM算法有较好的预测性能,能够对BOD浓度值做出比较准确的预测。
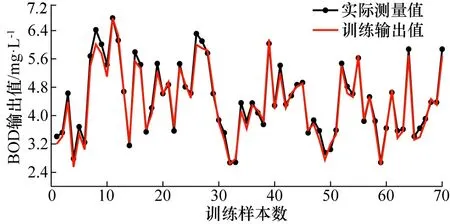
图6 PSO-ELM模型训练结果

图7 BOD测试结果
表2为BP神经网络、ELM以及PSO-ELM算法的测试时间、测试平均误差以及隐含层节点数的对比。由表2可知,与BP神经网络相比,ELM有更短的测试时间和更高的测量精度;而PSO-ELM算法进一步消除了ELM算法中冗余的隐含层节点个数,与BP神经网络和ELM算法相比运行时间分别缩短0.92 s和0.24 s,测试误差分别减小5.3%和4.0%,测试精度得到较大的提升,且具有较高的稳定性,在BOD的测量中表现出较好的性能。

表2 不同算法的测试结果
用秦皇岛近海海域海水水样对PSO-ELM算法模型进行测试,测试结果如表3所示。由表1和表3可知,PSO-ELM算法测试结果与BOD5的相对误差在2.69%~3.86%之间;与快速检测系统的测量结果相比,大幅减小了系统与BOD5法之间的相对误差。说明PSO-ELM测试模型能够较好地消除检测系统在检测过程中水质参数pH值、SS、ORP对微生物膜活性的影响,提高了检测系统的可靠性。

表3 PSO-ELM模型与BOD5测量结果
5 结 论
(1) 提出了一种基于微生物膜法的快速检测系统,系统以微生物膜反应器和微生物传感器为核心,其中微生物膜反应器采用螺旋玻璃管内壁作为基底培养微生物膜,增大了微生物膜的表面积,有利于微生物进行充分的生化反应,系统操作简单,能够在35 min内完成对海水水样的测量,可满足系统对快速性和高灵敏度的要求。
(2) 提出用PSO-ELM算法来实现BOD检测,算法基于PSO的快速全局寻优能力,优化输出ELM参数中的连接权值和隐含层神经元阈值,减少了ELM中冗余的隐含层节点,降低了计算复杂度,与BP神经网络和ELM算法相比,减少了运行时间,测试误差分别减小5.3%和4.0%,表现出良好的性能。
(3) 为进一步提高检测系统精度,基于PSO-ELM算法建立了检测系统测量的BOD值与水质参数pH值、SS、ORP的关系模型,消除了水质参数的干扰影响,得出最终的BOD值。在实际海水水样的测试结果中,该方法与BOD5法相对误差保持在2.69%~3.86%之间,性能稳定。
猜你喜欢
云南化工(2021年11期)2022-01-12
辐射防护通讯(2019年3期)2019-04-26
趣味(数学)(2019年12期)2019-04-13
绿色科技(2018年24期)2019-01-19
意林(儿童绘本)(2018年10期)2018-11-08
儿童故事画报·发现号趣味百科(2017年10期)2018-03-13
环境保护与循环经济(2017年4期)2018-01-22
作文周刊·小学一年级版(2016年39期)2017-03-03
山东工业技术(2016年15期)2016-12-01
化工进展(2015年6期)2015-11-13