极点配置状态反馈控制器的设计
2021-03-19 06:19:48王俊伟于新海
化工自动化及仪表 2021年1期
王俊伟 于新海
(河套学院机电工程系)
极点配置状态反馈控制器设计得好坏直接决定了控制系统动态性能的优劣。 配置极点的目的不仅是使系统稳定还要使系统的动态性能满足控制要求[1]。在配置状态反馈控制器时,根据被控制对象的要求,可以采用3种方法实现:极点配置状态反馈控制器的直接法、极点配置状态反馈控制器的变换法和爱克曼公式[2]。这3种方法仅适用于单输入系统,优点是只要系统能控,就可以实现极点配置的状态反馈,缺点是不能用于多输入系统的极点配置状态反馈控制器。 对于单输入系统, 如果系统能控可以实现极点的任意配置,改善动态性能,但有可能使闭环控制系统的稳态误差变大[3]。
1 极点配置状态反馈控制器的直接法
线性时不变系统如下:

其中,x是系统的n维状态向量;x·是状态向量对时间的导数;u是状态反馈控制律;A、B和C是适当维数的已知常数矩阵;y是系统的输出。
采用的状态反馈控制律是:

其中,v是一维外部输入;k是反馈增益矩阵。将式(2)代入式(1)得到闭环系统状态方程:

极点配置状态反馈控制器的直接法分5步实现[4]。
第1步,检验系统(1)的能控性,如果系统能控,进行第2步。
第2步,计算闭环系统特征多项式:

其中,λ是闭环极点。
第3步,如果闭环极点为λ1,λ2,…,λn,则期望闭环特征方程为:

第4步, 根据期望闭环特征方程与闭环特征方程多项式相等可得:
第5步,求出控制律:

2 极点配置状态反馈控制器的变换法
线性时不变系统为式(1)。 用变换法之前,需要将式(1)变换为能控标准型,实现方法分4步进行[5]。
第1步,引进线性变换x=Tx,将该线性变换代入式(1)得到能控标准型:

其中,A=T-1AT,B=T-1B。
第2步,计算系统矩阵A的特征多项式:

第3步,求取能控性矩阵:

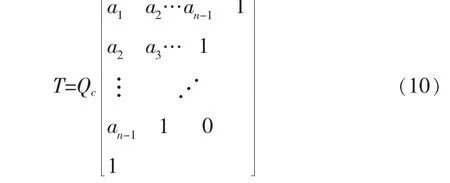
第4步,计算线性变换矩阵T:
极点配置状态反馈控制器的变换法分5步实现[6]。
第1步,检验式(1)的能控性,如果系统能控,进行第2步。
第2步,计算期望闭环系统特征多项式(λλ1)(λ-λ2)…(λ-λn)=λn+bn-1λn-1+…+b1λ+b0,确定b0,b1,…,bn-1的值。
第3步,计算系统矩阵A的特征多项式det[λIA]=λn+an-1λn-1+…+a1λ+a0,确定a0,a1,…,an-1的值。
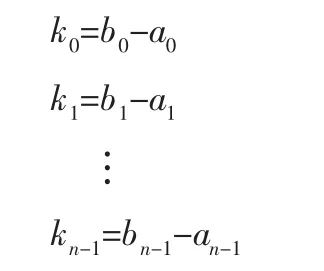
第4步,确定反馈增益矩阵k,k=[b0-a0,b1-a1,…,bn-1-an-1]T-1。
第5步,求出控制律u=-kx+v=-[k0,k1,…,kn-1]x+v。
3 爱克曼公式
对于三阶以上的系统,适合用爱克曼公式和变换法实现极点配置。 爱克曼公式的计算过程分4步实现[7]。
第1步,计算系统矩阵A的特征多项式φ(λ)=λn+an-1λn-1+…+a1λ+a0。
第2步,计算矩阵A的多项式φ(A)=An+an-1·An-1+…+a1A+a0I。
第3 步,求取能控性矩阵Qc=[B AB …An-1B]。
第4步, 反馈增益矩阵k=[0 0 0 … 0 1]Qcφ(A)。
4 仿真
笔者选用已建好模型的双级倒立摆状态空间模型[8]:
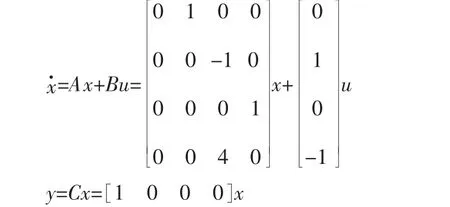
其中,状态变量x=[y y·θ θ·]T,θ是摆角,θ·是角速度,y是小车位移, y·是小车的线速度,u是状态反馈控制律(相当于作用在小车上的力)。
设计状态反馈控制律u=-kx+v, 使得闭环极点是-1,-2,-1+j,-1-j。 系统的初始状态x(0)=[0.2 0 -0.2 1]T。
直接法的闭环系统状态方程分4步实现。第1步,按照式(8)求出开环极点:
第2步,判断系统的能控性,如果系统能控,可以任意配置闭环系统极点。 根据能控性矩阵式(9)可知系统能控,即可以任意配置极点。
第3步,根据式(5)可以得到期望闭环特征多项式:
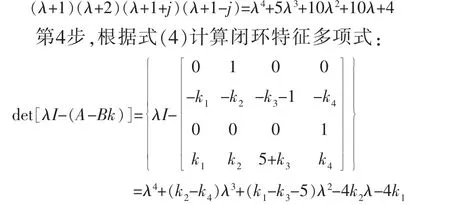
其中k=[k1k2k3k4],根据期望多项式与闭环多项式相等可得:k1=-1,k2=-2.5,k3=-17,k4=-7.5。
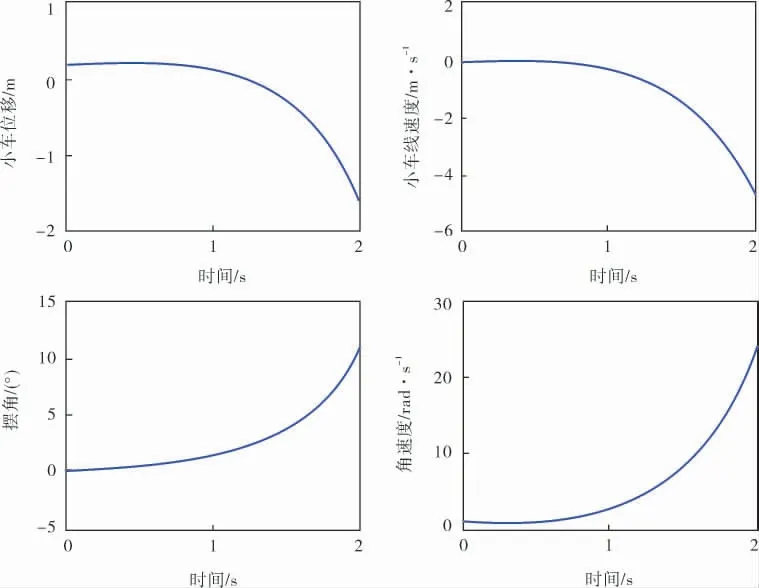
图1 开环系统初始状态响应
极点配置状态反馈控制律u=[1 2.5 17 7.5]x。
闭环系统为:


图2 闭环系统初始状态响应
闭环系统初始状态(x(0))响应如图2所示,可以看出,闭环系统状态是稳定的,说明通过极点配置的状态反馈控制器使状态不稳定的系统变为稳定系统,具有良好的动态性能,最终小车回到了初始位置,摆杆处于垂直位置。
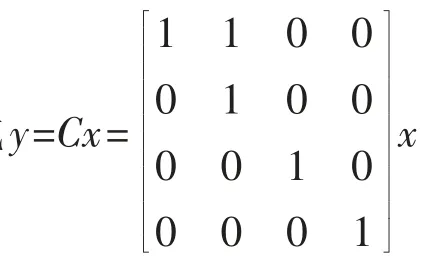
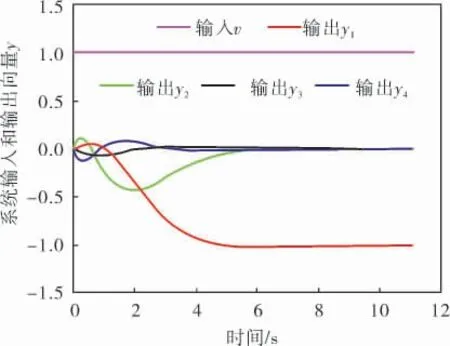
图3 闭环系统单位阶跃响应

图4 稳态误差曲线
5 结束语
阐述被控对象为单输入线性定常系统的状态空间模型极点配置的3种方法, 通过实例介绍了极点配置状态反馈控制器中直接法的计算和分析过程, 并通过MATLAB对直接法进行了开环状态响应、 闭环状态响应和闭环输出响应仿真。通过仿真实例说明,如果系统能控,可以任意进行配置极点设计所需的状态反馈控制器来改善系统的动态性能并使系统稳定,但带来的坏处是闭环系统输出有较大的稳态误差,所以需要设计其他控制器,使系统稳定、有较好的动态性能且稳态误差为零,如跟踪控制器,由于篇幅所限这里不做研究。
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
大电机技术(2022年3期)2022-08-06 07:48:24
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
环球慈善(2019年6期)2019-09-25 09:06:24
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12