温室喷雾机全景影像远程操控与监管系统设计试验*
2021-03-19 03:40魏旭超宋坚利马清俊李晓越宋卫堂
农业工程技术 2021年34期
魏旭超,宋坚利,马清俊,刘 洋,李晓越,宋卫堂**
(1.中国农业大学水利与土木工程学院,北京 100083;2.中国农业大学理学院,北京 100083)
设施园艺植保作业是设施生产中重要环节,是减少温室作物病虫害发生,实现增产增收的有效手段[1-2]。随着现代农业技术的不断进步,设施园艺装备的机械化、自动化程度不断提高,在田间管理环节,自动化喷药成为近些年研究的一个重要课题[3-4]。设施农机装备不断发展的同时,卫星导航技术、精准路径规划、机群协同作业等新兴技术也在不断创新发展[5-6],很多发达国家已经将最新技术融合到田间管理自动化施药装备当中,并已经能够满足实际生产的需要。国外针对温室喷雾作业,已研发了多款大型装备及作业机器人:实际生产中,温室大棚轨道式喷雾机应用较多,此类喷雾机多由中央计算机控制,自动化程度与工作效率都非常高[7-8]。
目前国内设施园艺植保作业大部分为传统背负式人工施药,作业时,施药人员直接暴露在农药弥雾中,农药雾滴通过呼吸道和皮肤渗透等方式进入人体,危害作业人员健康,尤其温室密闭、高温环境,更增加了人体体表对农药吸收的风险[9-12]。另外,还有一些半自动化施药机械也逐步推广使用,但由于喷药方式及设计工艺等问题,此类半自自动化植保设备的农药利用率仅为20%~30%[13-14],并仍需施药者与机具共同作业,农药暴露侵害现象并没有得到根本上的解决。因此,需要研究一种更为有效的设施园艺植保作业施药方法及装备,在降低操作人员劳动强度、提高作业效率的同时,能够真正实现“人机分离”,保护作业人员健康。
总体结构与工作原理
整机结构
温室喷雾机全景影像远程操控系统搭载在温室履带自走式风送喷雾机(图1)上[15],由基于无线全景影像的远程操控系统和基于4G 网络云平台的远程监管系统两部分组成。其中,远程操控系统可以协助操作人员进行植保作业,施药人员利用远程视频监控实现对喷雾机具作业状态的监视与控制,它包括机载全景影像系统和通信与控制系统。机载全景影像系统利用布置在车辆上的4 个鱼眼摄像头,通过处理器内置的算法程序,对四路单独拍摄的影像视频进行处理,经过畸变校正和图像拼接等图像处理流程,实时输出一幅无缝融合的鸟瞰图像,360。全景影像能够较好地弥补二维影像的不足,帮助操作者了解车辆周边视线盲区,扩大视野,形象直观。通信与控制系统将机载全景影像系统处理后的视频图像实时传输给操控者,操作人员借助视频影像完成远程视频操控。远程操控系统由鱼眼摄像头、中央处理器、遥控发射器、图传发射器、图传接收机等组成。基于4G 网络云平台的远程监管系统可在云端监控中心实时获取喷雾机的各类状态信息,该系统主要由摄像头、一体机显示屏和远程监控平台等部分组成。
工作原理
系统工作原理如图2 所示,作业时操作人员在温室外,通过视频影像接收设备,在显示器前实时监测喷雾机周围作业环境,根据传回的影像信息,及时调整喷雾机工作状态。进行喷雾机行走控制时,通过手柄遥控器发出控制信号,喷雾机履带底盘中的无线接收器收到相关信号后,对信号进行解析,并传输至电子控制器,电子控制器控制机械结构运行,无刷电机在得到控制信号后运转输出动力,动力经过传动箱后进行减速,最后作用于履带驱动轮,控制履带底盘的运转,从而实现远程控制机具自由行走和换向功能。进行喷雾作业控制时,操作人员发出的喷雾控制信号经由通信与控制系统,最终传递给管路电磁阀,电磁阀根据控制信号做出相应的动作,控制喷雾功能的启停。在喷雾机进行作业的同时,喷雾机机载GPS 定位模块接收位置信息,监管系统的影像采集摄像头记录机具周围环境工作影像信息,这些数据首先存储在本地内存中,当连接4G 网络后,对数据进行格式转换后通过4G 网络发送至云端服务器,作业人员可在计算机或手机对应监管软件上,远程查看喷雾机工作状态、作业路径等信息。
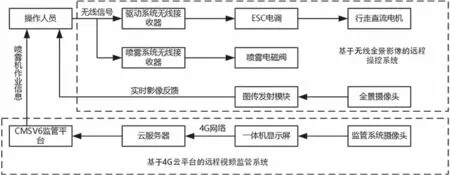
图2 温室喷雾机全景影像操控系统原理图
主要器件选型及构建
基于无线全景影像的远程操控系统构建
摄像头选型
为保证操作人员可监测到喷雾机周边的影像,要求摄像头能够采集较大的影像视野,同时,考虑作业环境较为潮湿,摄像头应具有一定的防水效果,经过对比相关摄像头参数信息,选用Sony225 型鱼眼摄像头,拍摄视角为170°,防水等级IP67。
中央处理器主机选型及参数设定
中央处理器主机主要对4 个鱼眼摄像头拍摄的图像进行畸变矫正、图像拼接及亮度均衡等处理,选用天安盛科技研发的Spelink 主机。进行图像处理使用的算法包括:基于特征点提取的SIFT 算法,采用非线性LM 算法进行优化,使用线性加权平滑算法对图像进行融合拼接,最终生成全景图像。
远程控制器件与选型
针对大型日光温室对信号传输范围和稳定性要求,遥控发射器选用乐迪AT9S-2.4G 型控制器,该控制器信号传输距离远,在空旷场地遥控距离可达3400 m,信号频率范围为2400.0~2483.5 MHz(IMS 波段),可以满足温室内信号传输需要。
图像传输器件选型
考虑温室高温、高湿对图像传输的影响,图像传输设备应选择较为稳定、耐用的工业级数传收发装置。选用RC-932 5.8G 图传发射器,具有32 个双向信道,可以实现自动搜频,自动与接收器对频;接收器型号为SKYDROID-UCV 5.8G手机图传接收机,通过外接连线与显示屏连接,理论传输距离大于500 m,可满足设施内图像传输需要。
基于4G 网络云平台的远程监管系统构建
一体机显示屏选型
由于喷雾机履带底盘空间较为狭小,且远程监管系统的中心处理器需要同时对视频信号、4G网络信号、GPS 信号进行综合处理,因此选择集成度较高的一体式监管系统,该系统将各功能模块、显示屏及中控处理器集成在一起,便于接线和安装。本系统选用顺心航科技的4G 远程一体式监管系统,屏幕为10.1 寸IPS 显示屏。
相关模块型号选型
摄像头模块选用顺心航科技的SXZ-CA08型无光夜视摄像头。GPS 定位模块分为主机芯片和收发天线两部分。主机芯片采用高灵敏度导航芯片SIRF4,内置于一体机显示屏中;收发天线固定在喷雾机车架上,用以接收信号,其收发频率为1575MHz。4G 通信模块为上海移远通QUECTEL-EC20 4G 通信模组,在传输良好的环境下,其最大下行速率可达150 Mbps,最大上行速率可达50 Mbps,支持各种网络协议栈。
远程监管平台
远程监管系统软件使用CMSV6 监管平台,该系统应用了GPS 定位、移动网络通讯及云计算平台等技术,可以满足实际应用且性能较为稳定、可靠。
试验与分析
为验证温室喷雾机全景影像远程操控与监管系统方案的合理性,将全景影像操控系统搭载在温室履带自走式风送喷雾机样机上,于浙江省温州种子种苗科技园进行实地测试,分别进行了喷雾机行走性能评价试验、摄像头布置位置效果测试试验以及云端传输效果测试试验。
搭载全景影像操控系统的温室喷雾机行走性能评价
试验材料与方法
试验温室东西走向,共有11 个开间,每个开间长度为4 m,东西总长度为44 m;共4 跨,每跨宽度4.8 m,连栋温室总跨度为19.2 m。试验大棚在宽度方向上可为南北两侧,每侧分别种植5 垄番茄,相邻两垄间过道宽度为90 cm,南北两侧种植区域间隔过道为180 cm。为保证喷雾机能正常在行间行走,对行间杂物提前进行清理。为保证喷雾机能正常转垄,栽培行两端预留直径0.5 m,弧度180 rad 的圆弧路径。为避免重复施药,提高作业效率,喷雾机在温室内以“梭形”路径行走,在路边作业时单侧喷药,在垄间作业时双侧喷药。远程作业小车在连栋棚内的作业路径如图3 所示。
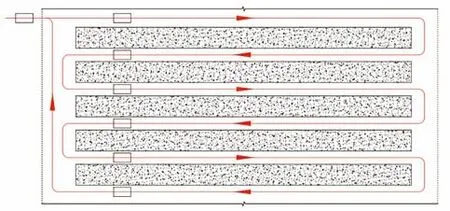
图3 远程施药小车作业路径
(1)喷雾机进门进垄行走测试
如图4 所示,在温室外,喷雾机上层横流风机为折叠状态,作业时,由作业人员将上层横流风机展开、固定,随后作业人员离开温室,通过远程视频影像,来操作喷雾机进入番茄行内进行作业。在作业过程中,通过实时视频影像,及时对喷雾机的行进姿态作出调整,若喷雾机路径偏差过大,与栽培垄有相碰撞的危险时及时停止工作,待原地纠偏后继续施药。

图4 喷雾机进门进垄试验
(2)喷雾机转弯转垄测试
在完成进门和直线行驶的测试后,操控喷雾机行驶至作物行间尽头处,开始转弯换行。转弯过程中完成行进方向纠偏后进入另一个植株行间,如图5 所示为喷雾机转弯行走测试过程,主要包括准备进弯、弯道纠偏、即将出弯和完成转垄四个作业环节。

图5 喷雾机转垄测试过程
(3)可操控性评价
关于人机协同工作的舒适度评价已有一套完整的国家标准和理论体系,舒适度主要指人体各个部位感官的综合主观感受,是对周围环境刺激的具体反应,当周围环境对人员个体从物理上、心理上和生理上的影响都达到平衡的时候,此时可以认定主观感受为舒适的。对于舒适度的评价可以分为主、客观评价法,其中客观评价法基于大量的数据研究分析,目前已经形成成熟的标准文件,可供评价者参考。
对于舒适度的评价是对主观感受的定量描述,会受到多种因素的共同影响,因此,对舒适度的评价也多方面的。借鉴已有的对于车辆操控舒适度的评价标准,结合本试验的试验探究,设计了一套喷雾机可操作性评价指标,远程影像喷雾机的可操控性评价主要可以从以下几个方面入手:操控人员观看远程视频的方式及设备、远程视频的实时性、遥控操控的便捷性、操作信号发出后喷雾机做出动作的延时等。通过上述几个指标,评价喷雾机与作业人员的配合程度,量化一些主观性的操控指标,以此来反映远程影像喷雾机的可操控性。
在人工远程操控下,每完成一次直线行驶和一次转垄作为一个测试组,根据测试前小车行走所规划的梭性路径,完成整个试验区施药作业需要进行六个测试组,记录每完成一次行进施药所用的时间,测试具体包括直线行驶、垄内纠偏和调整喷雾姿态等操作。根据现有对于车辆操控舒适度的评价标准,综合考虑无线图像传输延迟、喷雾机操控信号延迟、机械结构动作延迟等影响喷雾机行进速度的因素,将喷雾机的可操控性评价指标分为“快”“较快”“舒适”“较慢”“慢”五个档次,通过操控者主观评价,分析喷雾机行驶速度与可操控之间的关系,以得到最佳的行进速度范围。
试验结果及分析
操作人员在远程控制下,喷雾机完成了进入温室、进入作业垄、转垄等作业环节,喷雾机可以在作物行间完成直线行走、纠正偏移。在转垄试验过程中,需要提前进行转垄操作,不然会错过最佳转向角度,造成这一现象的原因主要是由于喷雾机作业时负载较大,差速电机无法达到较高的控制精度,因此无法及时驻车转向。
经过3 次重复的连栋温室模拟试验,喷雾机可由作业人员远程控制,在作物行间较好的按照预先设定的路线行进,且行进方向的误差偏离较小。在直线行驶较远距离后,喷雾机的行驶轨迹稍有偏离中心线,需要操控人员及时纠正偏差。对喷雾机较远距离直线行驶产生偏移的原因进行分析,可能有以下原因:①喷雾机底盘两侧履带分别由两台独立的电机驱动,当电流、电压不稳定时,两台电机输出轴转速不会完全同步;②履带采用非刚性橡胶材料,与路面接触可能会产生弹性形变,使整个履带产生偏移;③小车行进路径部分区域凸凹不平,引起喷雾机行进路径偏移。
如表1 所示,为试验过程中喷雾机按图3 所示路径顺序,以过道一端作为起点,每通过一个过道,并转垄至另一过道一端,所需的具体时间及平均速度。从表格数据及综合评价可以看出,喷雾机可操控性较好的行驶速度范围为0.28~0.33 m/s,综合考虑信号传输延时的问题,若速度过快会导致影像视频无法即使传输,画面卡顿严重,对远程操作带来不便;若速度过慢会导致喷头同一位置植株重复施药,造成农药浪费。初步确定喷雾机最佳行驶速度之后,即可确定施药量,进而为后续施药喷头的压力、喷口大小的改进提供参考依据。
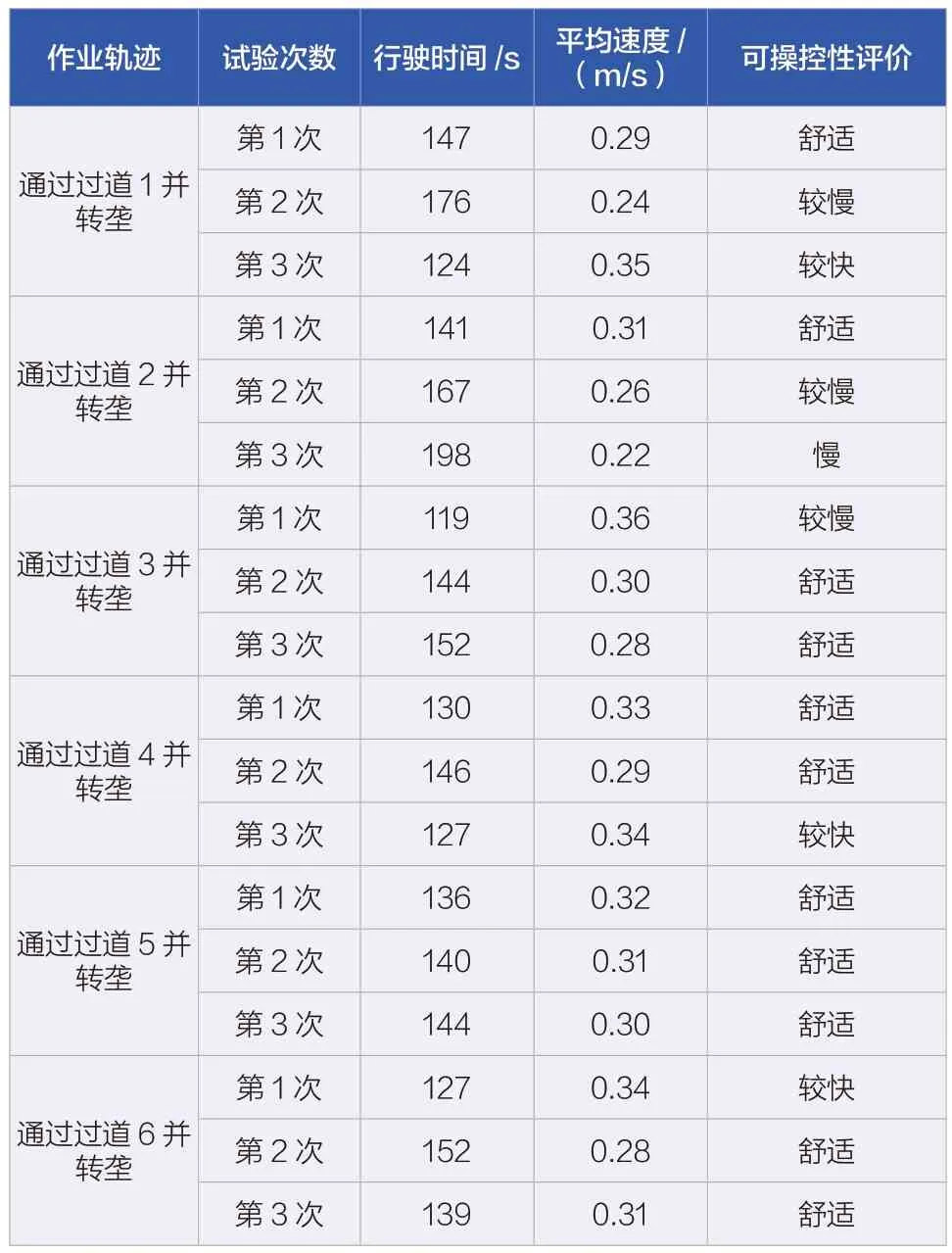
表1 喷雾机行驶速度及可操控性评价
上述试验结果表明,搭载温室全景影像操控系统的喷雾机,可实现真正意义上“人机分离”作业。进行喷雾作业时,操作人员只需在温室外,根据传送的全景画面,操控喷雾机完成喷雾作业,避免了作业人员长时间暴露在农药弥雾中,保护了作业人员健康安全。同时,通过遥控方式进行作业,在喷雾机行进速度在较为舒适的区间内,与传统人工植保相比,大大降低了劳动强度,并提高了作业效率和作业质量。
摄像头布置位置效果测试试验
试验材料与方法
根据人体工程学原理,分别就摄像头位置高低、拍摄角度、焦距,设计了两种布置方式,用以研究如何使实现人、农机、设施之间的最佳匹配,使远程操作人员能及时、准确、舒适的进行操控。
(1)摄像头布置方式1
喷雾机周围四个摄像头具体布置方式如图6所示,该布置方式将前视摄像头布置在施药架结构上距离履带底盘1.8 m 处,镜头朝向喷雾机前进方向,拍摄角度为俯拍30°;左视摄像头和右视摄像头分别固定在中部横流风机架结构的左右两侧,距离履带底盘1.3 m 高度处,镜头拍摄视角为平视;后视摄像头固定在施药架第一个横梁上,距离履带底盘1.4 m 位置,镜头朝向喷雾机后方,拍摄视角为俯拍30°。
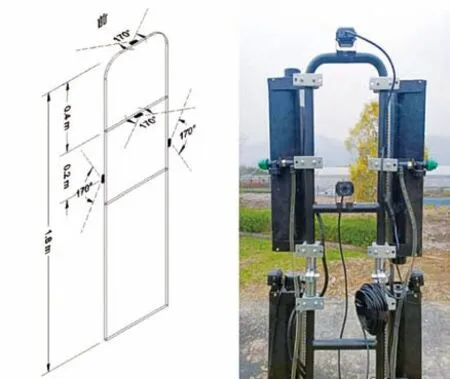
图6 摄像头布置方式1
(2)摄像头布置方式2
喷雾机周围四个摄像头具体布置方式如图7所示,该布置方式将前视摄像头布置在喷雾机履带底盘上,距离地面30 cm 处,镜头朝向喷雾机前进方向,拍摄角度为俯拍30°,左视摄像头、右视摄像头和后视摄像头布置方式与1 相同。
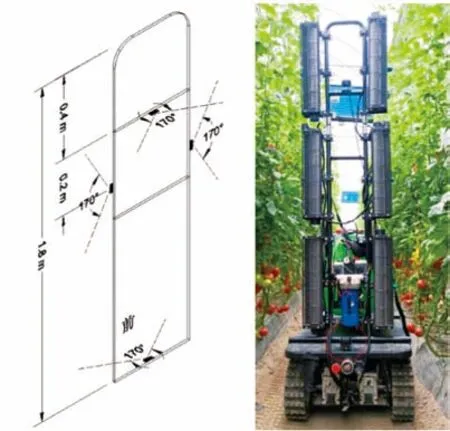
图7 摄像头布置方式2
试验结果与分析
采用布置方式1,摄像头可以拍摄到更大视野,能够查看到整个作业行全貌(图8),但在进行实际作业时,由于图像传输存在一定的延迟,操作人员在远程监控界面无法及时注意到喷雾机行进的路况。当通过显示的影像发现喷雾机出现轻微偏移时,喷雾机底盘可能已经出现较大距离的偏移,易导致喷雾机碰撞栽培行。因此,将摄像头布置于较高位置虽然可保证较广阔的视野,但不便于观察喷雾机轻微偏移,操作人员无法及时纠正喷雾机前进路径的偏差。

图8 摄像头布置方式1 成像效果
采用布置方式2,将前视摄像头固定在喷雾机履带底盘上,摄像头位置与垄面基本平齐,视角高度降低,摄像头可以拍摄到较为清晰的路面状况(图9),操作人员在远程监控界面观测到的喷雾机行进偏移距离与实际距离也相差较小,可以及时纠正喷雾机前进路径的偏差。

图9 摄像头布置方式2 成像效果
云端传输效果测试试验
试验材料和方法
打开CMSV6 软件(图10),设置IP 地址和端口号并登录系统,登录成功后在“实时预览”对话框下,可以看到喷雾机所搭载的远程视讯系统传回的图像,前后左右四路摄像头分别显示,在等待系统自动调试完成后,开启喷雾机风送开关和喷雾开关,开始远程施药作业。分别在日间和夜间对工作中远程监管系统成像效果进行测试。
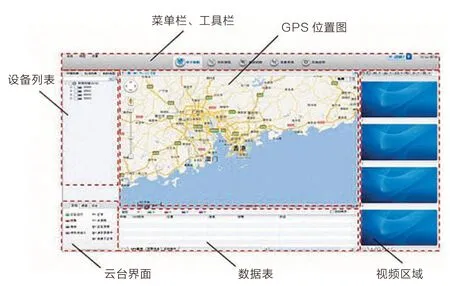
图10 客户端主窗体界面
试验结果与分析
在日间光线较好时,通过远程监管系统,可获得喷雾机上4 路摄像头拍摄的四个方向较为清晰的环境影像(图11)。每一路摄像头也可单独显示(图12),可将前视摄像头的影像框放大,获取更大的视野,方便操控。
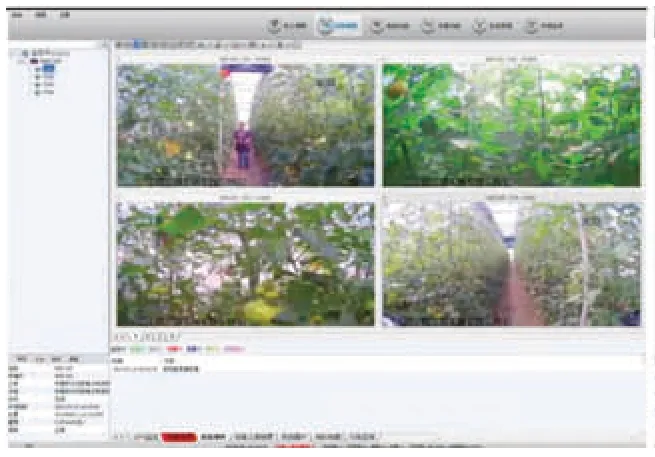
图11 四路影像监管界面

图12 单路影像监管界面
夜间光线较暗的环境下,摄像头的成像效果如图13 所示,影像效果较差,表明该系统目前不适用于在夜间作业,后期的研究可换用专用红外夜视相机,提升成像效果以满足夜间喷雾作业要求。

图13 实时影像夜间效果图
结论
本文主要设计了一种温室喷雾机全景影像远程操控与监管系统,系统设计完成后搭载于温室自走式风送喷雾机上进行性能测试。结果表明,该机具能够实现温室大棚等设施内的半无人化植保施药作业,可有效降低施药人员的劳动强度,消除农药对人体的危害,保护作业人员的健康。
(1)将全景影像技术与无线图传收发装置相结合,为喷雾机搭建了一套直观可视的全景影像操控系统。选用技术成熟、传输距离远、抗干扰能力强的FPV 图传系统进行视频信号传输,理论传输距离可达500 m 以上,视频图像的传输延迟时间小于1 s,满足实时操控的需要。
(2)针对喷雾机的行走性能和影像效果进行测试。综合考虑测试时各方面的影响因素,通过操控者对喷雾机的可操控性评价,确定了喷雾机可操控性较高的行驶速度范围为0.28~0.33 m/s。通过两种摄像头布置方案的对比,优化了摄像头的位置,提高了影像传输的质量和机具的可操控性。
(3)设计了一套基于4G 网络和云平台的远程监管系统。该系统通过移动网络将作业现场实时影像传送至云端,操作者可以在实时观看现场作业视频,并针对作业情况对喷雾机做出相应的姿态调整与控制。该套系统兼有GPS 定位和视频回放功能,可以实现喷雾机械的综合管理。
猜你喜欢
云南农业(2021年10期)2021-10-22
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
家庭影院技术(2021年6期)2021-07-28
家庭影院技术(2020年11期)2020-12-28
落叶果树(2020年5期)2020-10-22
英语文摘(2019年2期)2019-03-30
英美文学研究论丛(2018年1期)2018-08-16
农机使用与维修(2018年3期)2018-03-23
大陆桥视野·下(2017年6期)2017-09-05