基于ADHDP的单液流锌镍电池充电电流控制
2021-03-18 13:58:02宋春宁宁正高
电池 2021年1期
宋春宁,宁正高
(广西大学电气工程学院,广西南宁 530004)
单液流锌镍电池为典型的强非线性系统,在充电控制中,充电电流是最为重要的参数之一。在充电过程中,如果充电设备抗干扰能力与跟踪性能不理想,可能会引起电池充电不稳定,同时降低充电效率,给电池造成损害,甚至爆炸。
近年来,有关单液流锌镍电池充电控制的研究成果不多。对电池在充电电流控制方面的研究,仍然需要从其他更成熟的电池充电控制方法研究成果中学习与借鉴。采用比例积分微分(PID)算法,设计电流控制器对电池进行电流控制,是较常用的方法,但PID控制存在难以处理复杂非线性系统、超调量较大和调节时间长等缺点[1]。王君瑞等[2]设计的基于脉冲宽度调制(PWM)整流器和双向直流(DC)-DC变换器的车辆到电网(V2G)充放电拓扑,可控制电网侧与电池之间的能量流动;采用传统比例积分(PI)控制,实现电池的间歇式恒流充电仿真。研究发现,在负载扰动的情况下,系统能快速达到稳定状态。
自适应动态规划(ADP)是一种能够使动态规划的“维数灾难”得到有效解决的近似最优控制算法[3]。执行依赖启发式动态规划(ADHDP)是一种ADP算法,通过逐次迭代逼近最优控制解,不需要求解系统的复杂方程,是一种能较好解决非线性系统控制问题的优化算法[4]。X.P.Wang等[5]将具有在线学习能力的ADHDP用于控制超导储能(SMES)装置,吸收或释放有功功率和无功功率,并在MATLAB/SIMULINK中与PI控制器进行仿真比较,证明ADHDP控制器在三相故障和风电波动引起的电力系统振荡方面具有较好的阻尼性能,可提高电力系统的稳定性。李相俊等[6]使用ADHDP方法,通过储能系统对风电输出的不稳定功率进行调节,从而满足风电并网要求,且控制电池荷电状态(SOC)保持在适宜的范围内,实现电池储能系统合理充放电的功能,在与斜率控制方法比较后,验证了ADHDP控制方法的有效性和可行性。
为对单液流锌镍电池的充电电流进行跟踪优化,增强抗干扰能力,提高系统稳定性,减少跟踪误差、能量损耗,并提高充电效率,本文作者提出采用ADHDP的优化算法,对单液流锌镍电池的充电电流进行闭环跟踪控制。
1 电路模型与控制
1.1 二阶RC等效电路模型的建立
为保证等效电路模型辨识精度高和所需计算量小,同时反映单液流锌镍电池的浓差极化与电化学极化现象,本文作者建立二阶RC等效电路模型,并进行参数辨识和充电电流控制实验[7]。采用额定容量为14 Ah单液流锌镍电池的充电脉冲电流和脉冲电压做参数辨识实验。
电流(I)流经欧姆内阻(R0)、电化学极化电阻(R1)与电化学极化电容(C1)组成的R1C1回路、浓差极化电阻(R2)与浓差极化电容(C2)组成的R2C2回路,根据基尔霍夫定律可知:

式(1)-(3)中:Um为开路电压;Ucell为端电压;U1、U2分别为电化学极化和浓差极化的电压。
由式(1)和式(2)有:
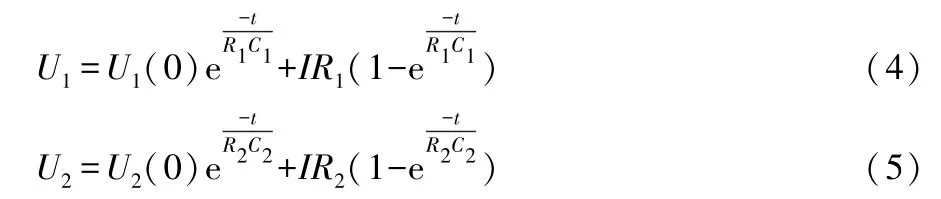
式(4)、(5)中:U1(0)为R1C1回路的初值电压;U2(0)为R2C2回路的初值电压;t为连续时间;e为自然常数。
将式(3)-(5)离散化,则有:
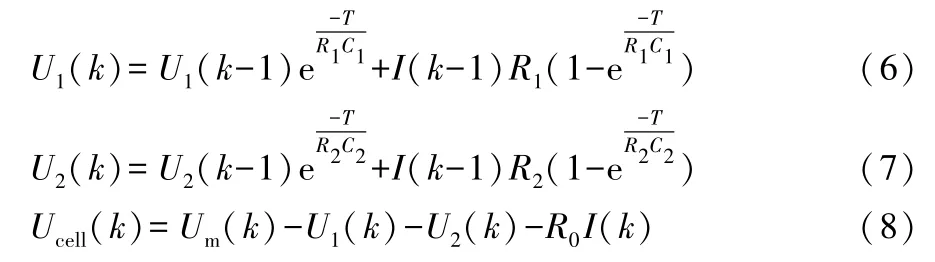
式(6)-(8)中:T为采样周期;k为离散时间。
1.2 Buck电路模型的建立
Buck电路是降压型电路,Ui为Buck电路的输入电压,即有Ui>Ucell[8]。Buck电路的输出负载为单液流锌镍电池。
滤波电感L的运算公式为:

式(9)中:D为占空比;fs为PWM发生器的频率;I0为单液流锌镍电池的充电电流。
滤波电容C的运算公式为:

式(10)中:Us为输出纹波电压。
1.3 充电电流控制方案
本文作者采用ADHDP控制器对所设计模型电路进行控制,控制系统框图如图1所示。
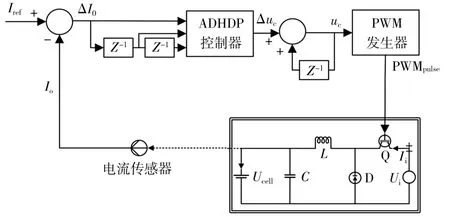
图1 单液流锌镍电池的ADHDP控制原理图Fig.1 Schematic diagram of action dependent heuristic dynamic programming(ADHDP)control of single-flow zinc-nickel battery
图1中:Z-1为延迟因子;C为电容;L为电感;D为二极管;Iref为参考电流;Ii为Buck电路的输入电流;uc为ADHDP的输出控制信号;Q为金属-氧化物半导体场效应晶体管(MOSFET);PWMpulse为PWM脉冲波,用于控制MOSFET管的通断。
该控制系统模型均采用MATLAB/SIMULINK平台下Simscape库的元器件进行设计。ADHDP电流控制器可实时对电池的充电电流进行反馈,通过ADHDP算法,进行自适应计算,求出最优或次优的控制信号增量,进而获得控制信号。该控制信号输入PWM发生器后,生成不同占空比的PWM脉冲波,对Buck电路的MOSFET管进行调整,因此能有效地跟踪控制目标。
2 ADHDP原理及控制器设计
文献[9]介绍了ADHDP的算法原理与ADHDP控制器的设计。在ADHDP控制器中,评价网络和执行网络都由BP神经网络构成。ADHDP内部采取误差反向传播算法分别对这两个BP神经网络的权值实行更新调节,得到最优权值,计算出最优控制动作,接着对单液流锌镍电池进行调控,使电池得以稳定,控制对象达到最优。
性能指标函数J(t)的运算公式为:

式(11)中:VU(t)为效用函数,它反映了整个系统的性能;γ为折扣因子,且0<γ≤1。
效用函数VU(t)的运算公式为:

式(12)中:采用t、(t-1)和(t-2)时刻的电流偏量ΔI0作为效用函数VU(t)的调节量。
3 仿真与分析
在对单液流锌镍电池二阶RC等效电路模型充电的过程中,于1 000 s与2 000 s时对充电电流进行突变扰动,分别观察在ADHDP控制和PI控制下的控制性能。单液流锌镍电池充电电流参考值突变的ADHDP控制和PI控制见图2。
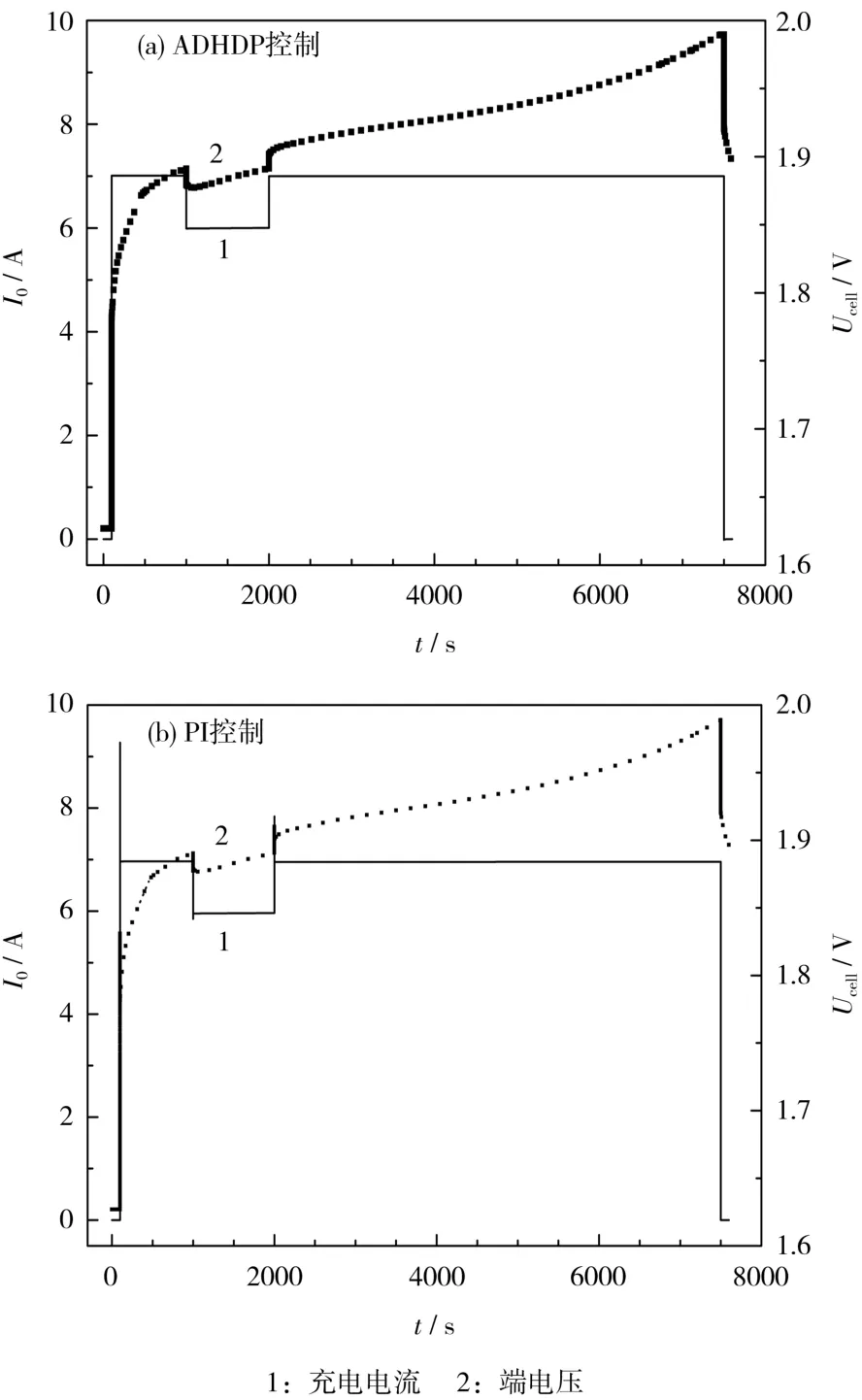
图2 单液流锌镍电池充电电流和端电压在ADHDP和PI控制下的动态响应曲线Fig.2 Dynamic response curves of the charging currentand terminal voltage of the single-flow zinc-nickel battery under ADHDP and PI control
从图2可知,在系统启动初期,ADHDP控制下的充电电流几乎无超调,而PI的超调量为32.86%。
在ADHDP控制和PI控制下,电池在1 000 s和2 000 s时的局部放大动态响应曲线见图3。
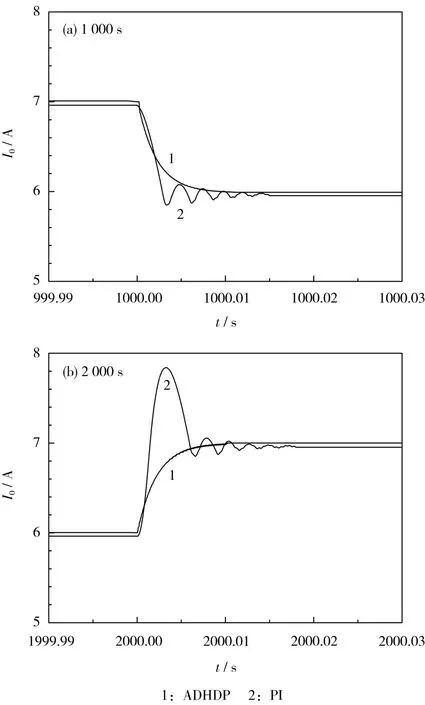
图3 单液流锌镍电池充电电流在ADHDP和PI控制下的局部放大动态响应曲线Fig.3 Partially amplified dynamic response curves of the charging current of the single-flow zinc-nickel battery under ADHDP and PI control
从图3可知,在1 000 s时,充电电流参考值由7 A突减到6 A,PI控制器不断地调控,使充电电流在几次大波动后才趋于稳定;而在ADHDP控制下,充电电流快速衰减趋向电流参考值,且几乎无振荡,从而使电池端电压具有较小波动,说明ADHDP控制器相比于PI控制器具有更好的抗干扰能力。在2 000 s时,充电电流参考值由6 A突增回7 A,PI控制下的充电电流超调量仍较大,而ADHDP控制下的充电电流超调量较小,ADHDP控制下的调节时间短于PI控制下的调节时间。可以看出,ADHDP控制器的电流控制效果更好。
在ADHDP控制和PI控制下,1 000 s和2 000 s时的PWM占空比变化曲线见图4。

图4 在ADHDP控制和PI控制下的PWM占空比变化曲线Fig.4 Change curves of PWM duty cycle under ADHDP and PI control
从图4可知,在1 000 s时,充电电流参考值由7 A突减到6 A,为了使充电电流趋于参考值,在控制器控制下获得PWM占空比,并在PWM发生器中产生相应脉宽的PWM脉冲信号,从而对BUCK电路进行调控;而此时的ADHDP控制器能快速对电路进行补偿调节。在2 000 s时,充电电流参考值由6 A突增回7 A,ADHDP控制器比PI控制器补偿调节BUCK电路的速度更快,从而使充电电流快速趋于稳定。
ADHDP的性能指标函数变化曲线见图5。
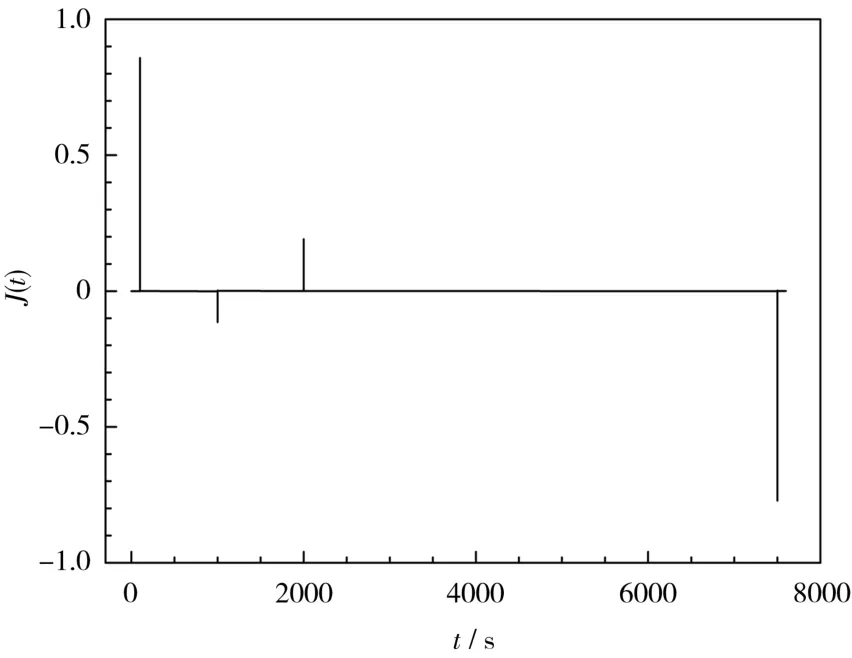
图5 ADHDP的性能指标函数变化曲线Fig.5 Change curve of performance index function of ADHDP
从图5可知,在100 s、1 000 s、2 000 s和7 500 s时,单液流锌镍电池的充电电流均有突变,在ADHDP控制器的控制下均能快速收敛,说明ADHDP具有良好的优化控制性能。
ADHDP的效用函数变化曲线见图6。
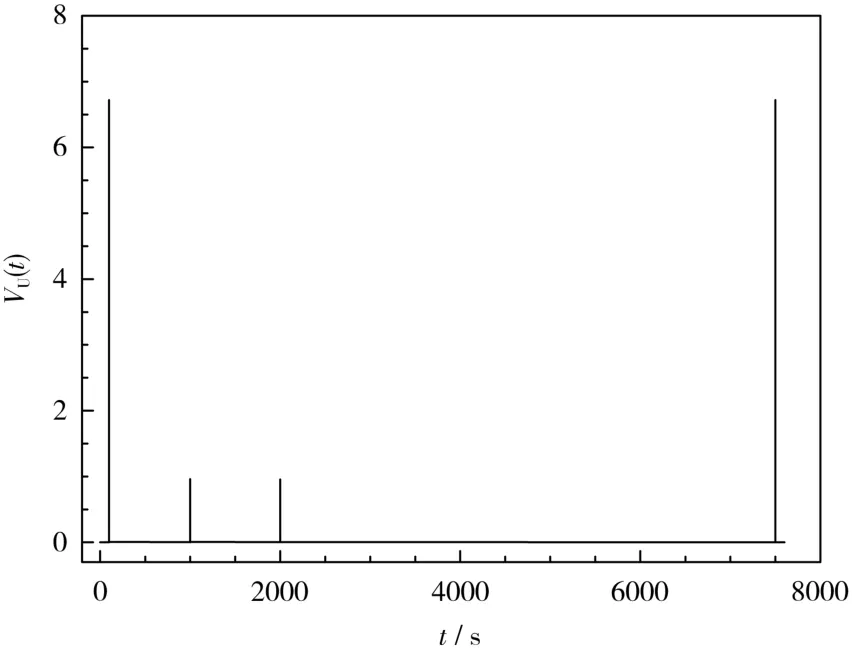
图6 ADHDP的效用函数变化曲线Fig.6 Change curves of utility function of ADHDP
从图6可知,在100 s、1 000 s、2 000 s和7 500 s时,效用函数VU(t)均能快速收敛,表明在ADHDP电流控制器的控制下,单液流锌镍电池控制系统的整体控制性能较好。
4 结论
本文作者为对单液流锌镍电池的充电电流进行较好跟踪优化,增强抗干扰能力,提高系统稳定性,减少跟踪误差,减少能量损耗,提高充电效率,采用ADHDP算法对单液流锌镍电池的充电电流进行闭环跟踪自适应控制研究。研究表明,在系统启动初期,ADHDP控制下的充电电流几乎无超调,而PI的超调量为32.86%。通过在1 000 s和2 000 s时分别对单液流锌镍电池充电电流参考值进行突变,将ADHDP电流控制器的仿真控制结果与PI电流控制器的仿真控制结果进行比较,验证了ADHDP电流控制器具有较优的跟踪突变能力和较好的抗干扰能力。
猜你喜欢
成都大学学报(自然科学版)(2021年1期)2021-05-22 01:31:20
铜仁学院学报(2018年6期)2018-07-05 09:47:50
单片机与嵌入式系统应用(2017年8期)2017-04-17 16:30:50
电源技术(2017年1期)2017-03-20 13:38:00
经济研究导刊(2016年30期)2016-12-24 08:08:52
电脑知识与技术(2016年24期)2016-11-14 02:23:35
广西电力(2016年5期)2016-07-10 09:16:44
电源技术(2015年7期)2015-08-22 08:48:36
中国高新技术企业(2015年14期)2015-04-29 20:05:29
中国质量与标准导报(2014年5期)2014-02-28 22:23:14