
基于改进Dijkstra算法的AGV路径规划研究*
2021-03-18 06:41:16李全勇
机械工程与自动化 2021年1期
李全勇,李 波,张 瑞,姜 涛
(1.内蒙古一机集团力克橡塑制品有限公司 技术中心,内蒙古 包头 014000;2.湖北文理学院 机械工程学院,湖北 襄阳 441053;3.武汉科技大学 机械自动化学院,湖北 武汉 430081;4.北京星航机电装备有限公司 技术中心,北京 100071)
0 引言
自动导航运输车(AGV)作为智能物流的核心设备,广泛应用于汽车、食品、烟草、医疗、服装等行业。路径规划是AGV应用的核心技术之一,对其进行研究具有极高的工程价值。文献[1]提出了一种基于时间最短的无碰撞路径算法;文献[2]在AGV调度算法中计入空闲时间,基于遗传算法进行调度规划;文献[3]将改进遗传算法应用于AGV避障路径规划;文献[4]研究了细菌势场算法,求解移动机器人静态和动态路径规划;文献[5]在车间调度中引入了灰狼优化算法,预测工件到达时间;文献[6]提出了改进重力搜索算法,仿真实现了在静态障碍物下的路径规划;文献[7]采用Dijkstra算法求解单台AGV最短路径,实现AGV的智能无线控制;文献[8]提出一种改进型蚁群路径规划算法,加入全局信息素更新机制,提高了算法的搜索效率;文献[9]以最小化最大搬运完成时间为目标,研究了一种生成无路径冲突的路径规划算法;文献[10]采用遗传算法对改进蚁群算法进行参数优化,以提高收敛速度,避免局部最优。
针对磁导AGV运行特点,本文进行了基于栅格法的拓扑地图建模,分析了A*、蚁群、遗传、Dijkstra算法的AGV路径规划问题,引入路径平滑度,并以时间权重为优化目标求解最优路径,提出了改进Dijkstra算法,开发了路径规划仿真系统,进行了多种算法AGV路径规划对比分析。
1 AGV地图模型构建
地图模型构建是AGV路径规划的基础,直接影响路径规划算法的设计。本文基于栅格法的无向有权拓扑地图方法,开展AGV运行环境的建模,如图1所示。
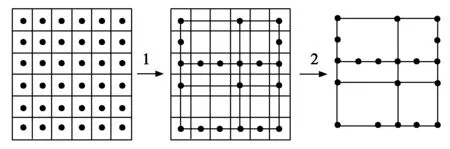
图1 地图建模
以栅格图为基础,每个网格中心为节点,连接相关节点作为边,其代表路径规划中的磁导线。保留图中节点和边,去除网格,剩下部分为拓扑地图的地图模型。
2 基于改进Dijkstra算法的AGV路径规划
针对拓扑图下的AGV路径规划问题,A*算法求解最短路径,但由于受到估计代价值的影响,算法出现局部最优,稳定性不佳;蚁群算法虽能得到强鲁棒性的优化路径,但对全局搜索能力较低,收敛速度较慢,容易在搜索过程中陷入局部最优;遗传算法具有良好的搜索能力,不易陷入局部最优,但局部搜索能力较差,进化后期搜索效率较低,需对算法本身参数进行优化,避免过早收敛。
Dijkstra算法[11]作为一种贪心算法,以起始点为中心源点层层向外扩散直至搜索到所有节点的最短路径。其根据路径总权重来获得最短路径,两节点之间权重使用一般直线距离公式求解:
(1)
传统Dijkstra算法作为典型的最短路径算法,可准确获取全局最优路径,通常将路径长度作为权重因子搜索最短路径,但无法考虑到路径平滑度对AGV实际运行中的影响。
本文提出以时间权重作为最优路径的考虑因素,通过模拟AGV从起点至终点运行花费的总时长,对比AGV在各个可行路径中的运行最短时长,筛选出最优路径。时间权重T函数表达式为:
(2)
其中:Dij为节点i、j之间的距离;U为AGV在路径直线部分的平均速度;TΦ为弯道总权重,表示AGV经过所有弯道时间权重;Tij为时间总权重,表示AGV从节点i到节点j总权重。弯道总权重函数表达式为:
(3)
其中:S(i,i+1)为首尾分别为节点i与节点i+1的边;tΦ为两条相邻边夹角的权重。
AGV在巡线过程中面对不同角度弯道做出不同动作,其中夹角权重如式(4)所示:

(4)
其中:R为拐弯类型标识符,R=0表示角度弯,R=1表示为弧度弯;r为拐弯半径;c为转弯因子,根据不同AGV拐弯机制设定,值为常量,用U·c表示AGV拐弯角速度;wβ为减速因子,用于弧度弯道中,表示AGV过弯时减速程度;W为旋转精度惩罚因子;Φ为转角角度;tw为减速损耗权重,用于表示减速带来的时间损耗,表达函数为:
(5)
其中:dw为减速缓冲距离(减速节点与转弯节点的距离);wα为减速因子,表示AGV进入弯道前的减速程度,wα≤1。
AGV经过不同角度弯道时会产生不同层次时间损耗,根据这一特性,依据角度Φ的不同,将夹角权重tΦ分为三个阶段分析求解:
第一阶段(0≤Φ≤Φ1):转弯夹角很小,此类弯道所产生时间损耗为0。
第二阶段(Φ1<Φ≤Φ2):弯道夹角适中,AGV无法通过自动巡线功能通过此类弯道,可在弯道夹角放置拐角节点,根据信号依次完成急停、准确地旋转相应角度、恢复巡线速度等动作。
第三阶段(Φ2<Φ≤Φ3):当弯道夹角过大,AGV无法旋转至相应角度,会产生或多或少的旋转角度误差。此时,AGV会通过自身巡线功能,以拐角节点为中心左右旋转寻找磁导线。随着拐弯夹角的增大,产生的误差角度也会增大,随之带来的巡线损耗时间也会增加。为此提出W旋转精度惩罚因子,可根据不同AGV自身的性能设值。
通过对两夹角的权重分析,最优路径权重可由式(6)表示:
(6)
3 仿真验证
采用C#语言开发了Winform应用程序,进行了多算法仿真实验。图2为AGV仿真平台界面截图,采用栅格法拓扑图进行车间地图布局。
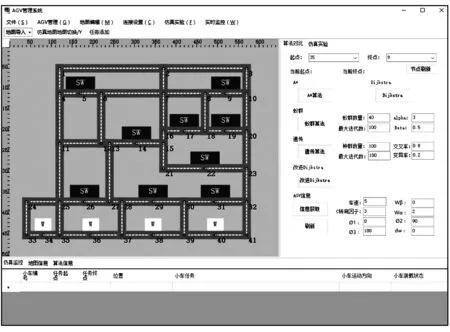
图2 仿真界面
根据图1地图模型,将41个节点与53条边信息录入系统,完成实验数据初始化。地图拐角信息主要采用角度弯道,U=5(以模型比例设置),wα=2,wβ=0,Φ1=0°,Φ2=90°,Φ3=180°,c=3°,dw=10,W=0。通过选择不同任务起点与终点进行实验,结果如表1所示。

表1 实验数据表
通过多次实验,选择三组特征值最明显的数组进行对比,主要结论如下:
(1) 蚁群算法与遗传算法在求取最优路径时具有不稳定性,在多次求解过程中会出现多个长度相同、但是拐弯次数不同的路径,在迭代次数不足的情况下,蚁群算法更是无法获取路径长度最短的解。
(2) A*算法、遗传算法、改进Dijkstra算法的稳定性更好。
(3) 改进Dijkstra算法每次获取路径都为最优解(理论用时最短),求得路径长度虽大于其他路径算法,但理论用时依然是最少。
为进一步验证算法的可靠度,开展了120个节点车间环境的仿真实验,布局如图3所示。
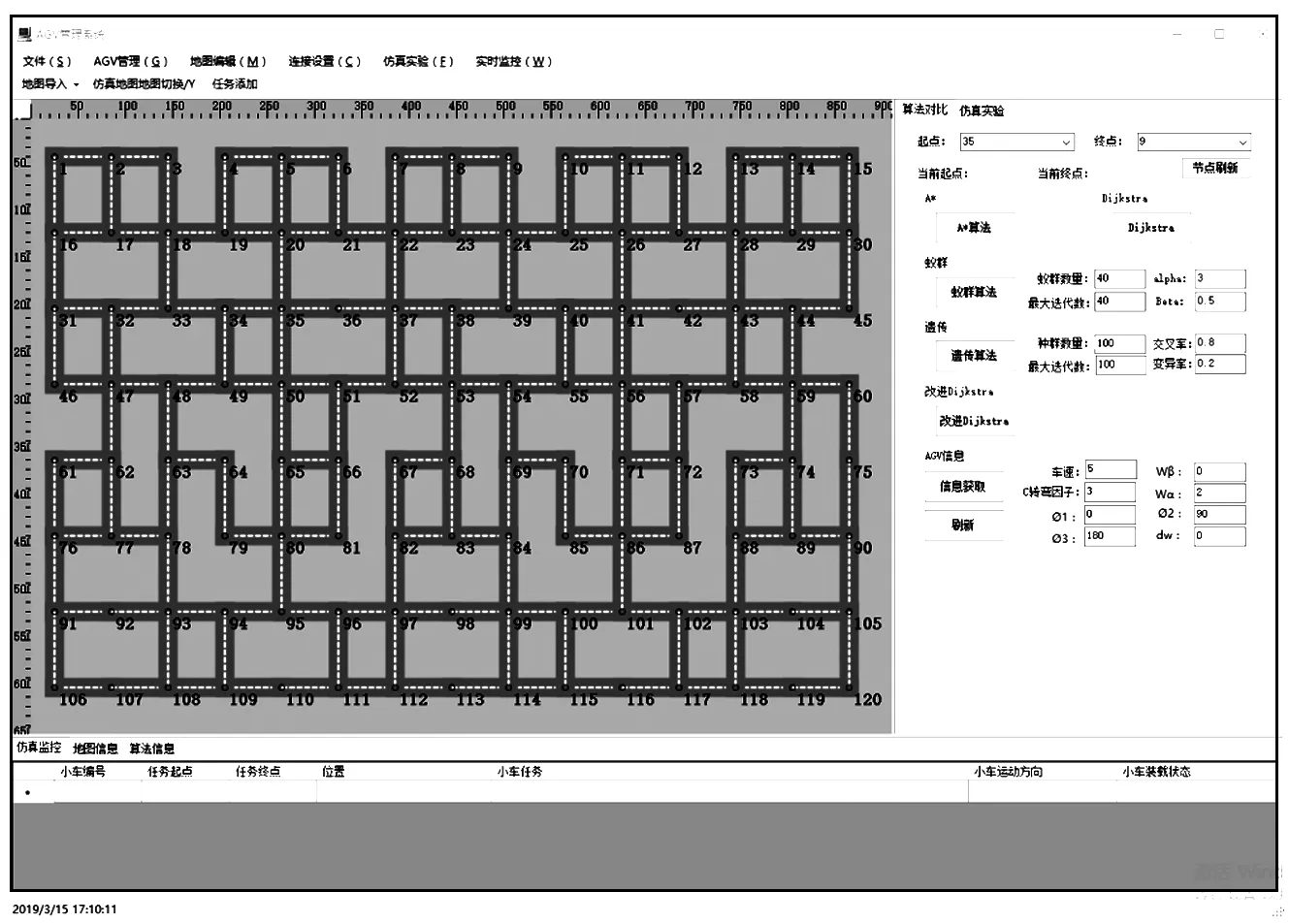
图3 地图模型
120个节点使用了无规律的连接来降低实验环境的平滑度,总共有173条连接线。仿真实验以1号节点为起点,选择图中一系列坐标点作为实验终点进行多次验证。
采用蚁群算法与遗传算法分别对每组数据进行100次实验并提取平均值,进行实验数据对比。其中蚁群算法参数设置为:蚁群数量40,最大迭代次数40,alpha=3,beta=0.5;遗传算法参数为:染色体数量50,最大迭代次数20,最大变异次数20,交叉率0.8,变异率0.2。实验数据对比如图4所示。
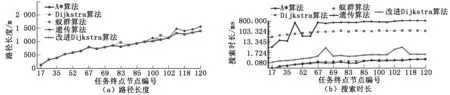
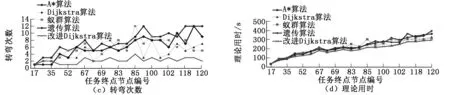
图4 仿真数据对比
4 结语
本文基于栅格的无向有权拓扑方法,建立了AGV系统仿真地图模型;分析了A*、蚁群、遗传和Dijkstra算法,针对上述算法在拓扑图中的适用性问题,提出了改进的Dijkstra算法,引入路径平滑度,以时间权重为优化目标求解最优路径;基于仿真平台,开展了上述算法在拓扑地图模型的实验对比,测试结果表明:改进Dijkstra算法在路径拐弯次数、模拟运行时间等方面具有良好表现。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
当代陕西(2020年17期)2020-10-28 08:18:18
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
人大建设(2018年5期)2018-08-16 07:09:00
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
电信科学(2017年6期)2017-07-01 15:44:57
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
广西电力(2016年5期)2016-07-10 09:16:44
