
分布式行波定位技术在35 kV输电线路应用研究
2021-03-18 12:02王乾龙罗艺晏凯
云南电力技术 2021年1期
王乾龙,罗艺,晏凯
(云南电网有限责任公司曲靖供电局,云南 曲靖 655000)
0 前言
35 kV 是配电网重要组成部分,我国35 kV系统一般采用小电流接地运行方式,其优点在于单相接地故障后可以持续运行一段时间而无需立即分闸,提升了供电的可靠性[1-3]。然而,由于其接地方式的影响,当发生单相接地故障时,故障电流变化不明显,另一方面,有大量35 kV 线路为T 接或混架组成的复杂线路,导致故障选线困难,更难以进行精确定位,使得线路管理及故障排查工作量极大[4-6]。
近年来逐渐出现了多种技术用以解决35 kV输电线路故障选线或者定位问题,其中零序无功功率方向法、零序电流比相法、零序电流比幅法等等可以用于故障选线,但无法精确的定位出故障所在位置,且在经消弧线圈接地方式下无法适用[7-8]。基于零序电流有功分量法、5次或多次谐波法、残流增量法、零序导纳法等等不受接入消弧线圈的影响,但因故障特征不明显,故障点电弧难以持续燃烧所致,实际应用情况欠佳[9-11]。
行波定位技术已广泛应用于110 kV 及以上电压等级输电线路,尤其近年来新兴的分布式行波定位技术,更是将行波监测与应用发挥到了极致,在故障诊断效果上提升显著[12-15]。随着电子技术的飞速发展,电子元器件功耗大幅降低以及取能单元效率的显著提升,以往适用于110 kV 及以上电压等级的分布式行波定位技术,目前已经具备了在35 kV 及以下电压等级上应用的可能性,且在国内电网上进行了批量应用。本文介绍了分布式行波定位技术系统原理、组成,并通过实际工程案例,说明了分布式行波定位技术定位的实施过程及其定位可靠性。
1 输电线路故障行波定位原理
行波定位法是通过实时检测输电线路故障时刻产生的放电行波,结合行波传输路径、输电线路档距参数、行波传输时间来进行综合定位。经过几十年的发展,目前已经出现了A、B…F 等6 类行波定位方法,其中A、C、E、F通过检测行波来回折反射过程并识别主波及反射波时间差来进行定位,不需要GPS 等时钟同步,是一种单端定位方法,而B、D 型则是通过检测行波达到双端检测点时间差来进行定位,需要高精度同步授时时钟,属于双端定位法[6,9]。
单端行波定位方法中,由于变电站母线、故障点等过渡阻抗不连续点均会产生反射,因此同一个行波中可能存在多个反射波,根据采用反射波的不同可以将单端定位分为基于变电站母线反射波的单端定位法和基于故障点反射波的单端定位法。其中基于故障点反射波的单端定位法定位原理示意图如下图1 所示。该方法适用于金属性接地等过渡阻抗较小的故障,对于高阻故障,可能因故障点反射波不明显而造成定位失效。如上图1 所示,故障点发出的行波沿线路向变电站母线上传输时,首次到达站端检测点的时刻为TM1,达到母线后,经母线反射形成第一次反射波,该反射波从母线向故障点行进,在故障点发生第二次反射,第二次形成的反射波达到站端检测点的时刻为TM2,此时故障点离变电站母线距离XM可通过下式(1)给出:
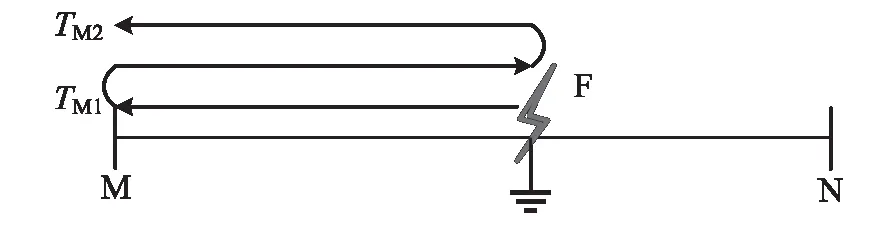
图1 单端定位原理示意图

双端行波定位法需要在故障点两端均布置行波检测装置。故障发生后,行波从故障点沿线路向两侧传播,由于故障点离两侧检测装置距离存在差异,因此达到检测装置的绝对时刻不同,通过对比两装置行波达到起始时刻的差异,可以计算出故障点的精确位置。其测距原理示意图如下图2 所示。
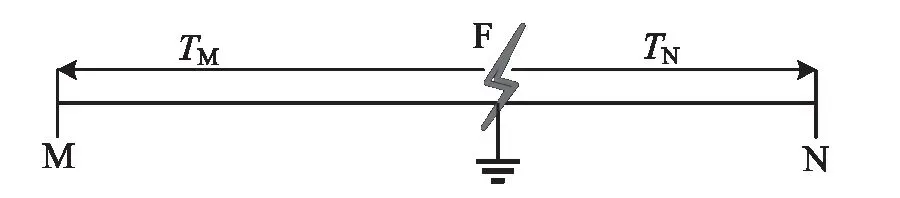
图2 双端行波定位示意图
在图2 中,设故障点位于F,行波达到M端和N 端的精确时刻为TM和TN,M 和N 之间线路全长为L,故障点与M 端距离为XM,与N端距离为XN,那么:

式(1)中计算定位需要用到反射波与主波时间差,通过检测装置内部晶振时钟即可读取,无需主波和反射波的绝对时刻,因此不需要GPS 等精确授时。式(2)虽也是利用时间差进行计算,但式(2)是通过两端装置采集的两个不同波形来获取时间差,因此GPS 精确授时是双端定位应用的一个前提。
2 分布式故障监测系统
分布式故障监测系统由监测装置(终端)、数据中心站(简称中心站)以及客户端组成,其中监测装置根据安装方式的不同可分为安装于三相导线上的接触式监测装置和安装于杆塔上的非接触式监测装置。装置实时采集输电线路工频电流、工频电压突变量,以及行波电流和行波电压,并将采集信号通过4G 等无线方式发送至中心站进行统一处理。中心站主要由性能强大的服务器集群组成,通过预设的故障判断算法、行波精确定位方法对上传的波形数据进行综合分析诊断,并输出精确定位结果,并通过实时短信方式发送至运维人员手机上,运维工作人员也可通过部署于内网或外网服务器上的WEB 界面读取故障分析结果,并支持数据导出功能。分布式故障监测系统架构如下图3 所示。
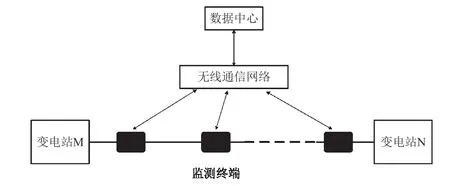
图3 分布式故障监测系统架构示意图
分布式故障监测系统主要功能分为以下几个部分:
1)工频和行波信号的采集:监测装置可对正常运行线路工频电流、电压信号进行定期采集,当发生故障后,也能实现故障工频及故障行波的采集,此外,当线路上出现因雷击、变电站操作等引起的大幅值扰动行波时,也能实现实时记录;
2)数据处理和诊断功能:中心站基于监测装置采集上传的数据,可智能识别工频分闸、重合闸成功及失败、断电以及送电等波形,并进行标记。具有双端、单端定位算法,以及小波波头提取算法等,可对故障行波进行识别,并进行定位分析;
3)通信功能:利用4G 等无线方式进行通信,支持监测装置参数设置、远程升级、断电重启,自检状态上发、上报心跳、上传监测波形等等功能;
4)故障告警功能:系统判定线路发生故障后,及时通过短信将故障结果推送出来,方便人员第一时间内掌握故障详情,并指导尽快巡线,降低故障造成的损失。
3 工程应用
某35 kV 线路为T 接架设,其中主线全长为26.7 km,总计95 基杆塔,T 接点杆塔编号为#31;支线全长为11.8 km,杆塔数为46。分布式故障监测终端分别布置于主线#1、#95 杆塔对应的三相导线上,也即首尾布置。与此同时,在支线首尾端,也即#1、#46 杆塔对应三相导线上安装了监测终端。线路结构及监测终端布置示意图如下图4 所示。
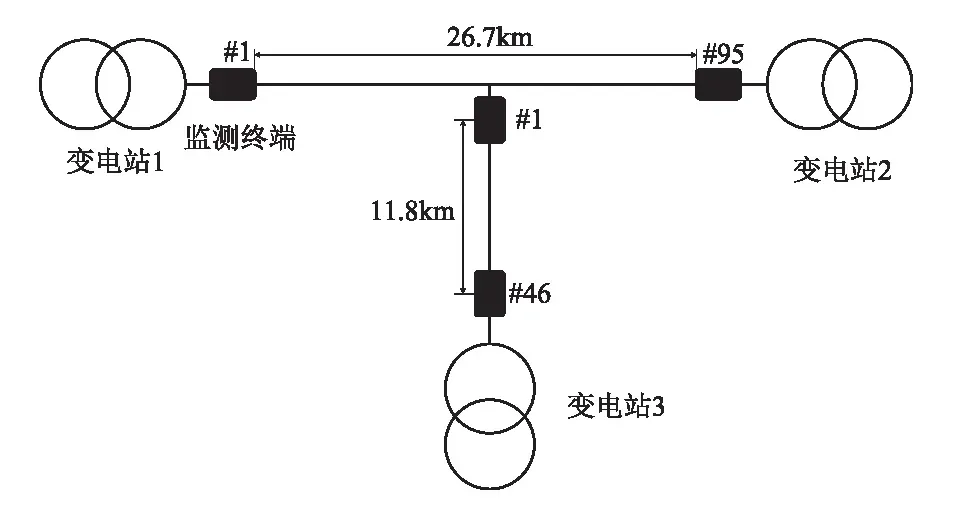
图4 监测终端布置示意图
某时刻该T 接线路发生了跳闸故障,安装于主线及支线上的设备均对故障时刻故障工频电流及行波电流进行了全面的监测,如图5-图8 所示。

图5 主线上的监测终端监测到的故障工频电流
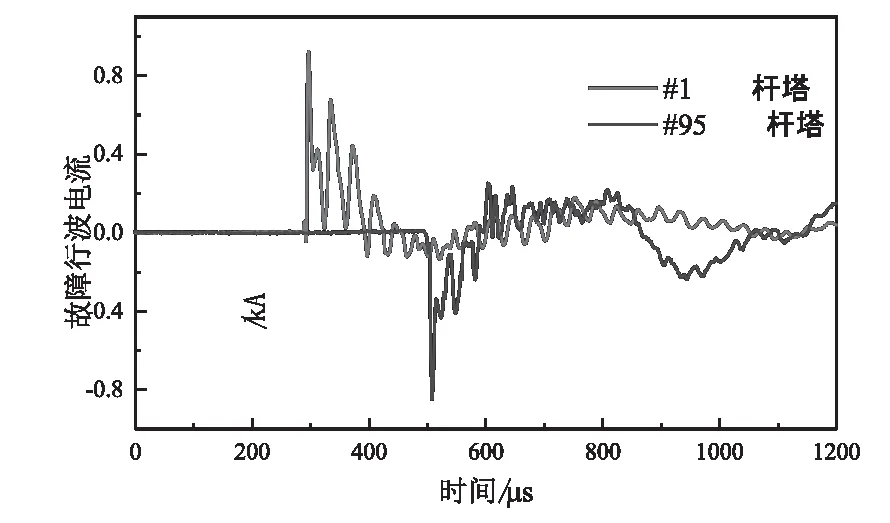
图6 主线上的监测终端监测到的故障行波电流

图7 支线上的监测终端监测到的故障工频电流
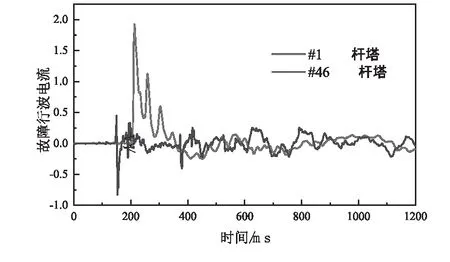
图8 支线上的监测终端监测到的故障行波电流
根据分布式故障监测终端故障区间判断原则,当两端监测终端测到的故障工频极性相同时,故障位于区间外,反之位于区间内。图5 中,#1 和#95 杆塔对应的故障工频极性相反,因此判定故障点位于#1 和#95 监测终端之间,可能位于主线上,也可能位于支线上。
图6 中,通过监测终端记录的GPS 时钟信息,行波波头到达#1 监测终端的时间比到达#95 早33.29 μs,行波波速取290 m/μs,通过双端行波定位法判断故障点位于#31 杆塔。结合主线上故障工频特征,并考虑实际行波定位可能存在一定的偏差,因此进一步判断故障点可能在T 接点附近1 基杆塔内,或者位于支线上。
图7 中,根据支线上故障工频极性相反特征,判断故障点必然位于支线#1 和#46 之间,排除了故障点位于主线上的可能性。
图8 中,故障行波波头达到支线#46 杆塔时间比到达支线#1 杆塔早22.94 μs,通过双端行波定位法定位出故障点位于#46 杆塔靠近T接点2.57 km 处,对应的杆塔编号为#36,实际巡线时在#36 杆塔处发现了绝缘子污闪的痕迹,表明本次故障定位准确,不仅实现了主支线故障的判断,也精确的定位了故障所在位置。
4 结束语
分布式行波定位技术采用分段检测方法,通过单端、双端多种定位相互印证,提升了故障定位精度,实际应用案例表明,该技术定位精确可靠,可以解决35 kV 输电线路故障精确定位的难题。
猜你喜欢
卫星应用(2022年1期)2022-03-09
机电信息(2020年12期)2020-06-29
电子制作(2019年24期)2019-02-23
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
上海师范大学学报·自然科学版(2018年3期)2018-05-14
科技创新导报(2017年30期)2018-02-03
科学与财富(2017年33期)2017-12-19
科技与创新(2015年9期)2015-06-02
