
基于EtherCAT的倍福IPC与SIMOTION运动控制器的通信研究
2021-03-16 04:01李桢辉
中国新技术新产品 2021年24期
康 乐 李桢辉
(许昌烟草机械有限责任公司,河南 许昌 461000)
0 引言
目前,烟草机械设备从传统PLC 控制开始逐渐向IPC 靠拢,基于PC 的控制技术提供了良好的可升级性和灵活性,倍福IPC 以其具有的EtherCAT 技术成为主流控制器[1-2]。在公司生产的装盘机上采用了倍福的CX2020 IPC 控制器,该控制器基于PC 控制,配合TwinCAT 软件能够实现设备的逻辑控制、数据存储等功能,装盘机的电机动作采用西门子SIMOTION D 运动控制器,西门子的运动控制器所支持的协议为Profinet,该协议与倍福支持的EtherCAT 协议不能直接进行数据交换,因此,需要对倍福IPC 与SIMOTION 运动控制器之间的通信进行研究,使倍福控制器能够正常地与运动控制器进行数据收发,从而保证设备的正常运行。该文在公司所研发的装盘机的基础上,选用EL6631 通信协议转换模块对2 种通信协议进行转换,通过在倍福控制器和运动控制器上进行通信配置的方法使两者之间可以正常通信。
1 通信架构
公司研发的装盘机需要完成对烟支的临时装盘存储,逻辑动作较多,对系统的实时性要求较高,需要多个外部传感器来配合完成装盘动作,装盘机电控系统的详细通信架构如图1 所示。图1 中,装盘机采用倍福IPC 作为主控制器,采用西门子SIMOTION D435 运动控制器作为伺服控制单元;同时,通过EtherCAT 总线下挂外围输入模块,通过E-BUS连接内部输入输出模块,图1 中的17A6 为EL6631 通信协议转换模块。
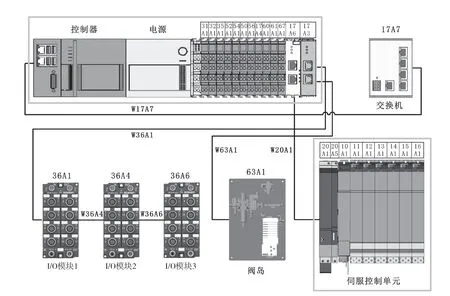
图1 装盘机通信架构图
除运动控制器外,所选用的从站均支持EtherCAT 协议。为了实现基于EtherCAT 的倍福IPC 与SIMOTION 运动控制器的通信,选用倍福EL6631 作为EtherCAT 与Profinet 协议转换模块,它作为EtherCAT 和Profinet 之间的网关,连接了2 个实时以太网系统,EtherCAT 端子模块系统能够通过EL6631 模块将现场总线集成到工业以太网系统中,使倍福控制器和SIMOTION 运动控制器之间能够正常收发数据,为完成设备的逻辑控制和运动控制提供保障。
2 接口配置
在图1 所示的通信架构的基础上,需要完成对运动控制器和倍福IPC 两端的接口设置工作,因为倍福IPC 作为主站、SIMOTION 作为从站,所以需要先对SIMOTION 进行配置。
2.1 SIMOTION 接口配置
SIMOTION 接口的配置是通信正常连接的关键,包括SIMOTION 网络配置、I-DEVICE 输入/输出设置以及GSD 文件导出[3-4]。
2.1.1 SIMOTION 网络配置
SIMOTION 网络配置是使运动控制器连接IPC 的重要步骤。SIMOTION D435 有3 个用来进行以太网数据通信的端口(X127、X130 以及 X150),X127、X130 支持Ethernet,X150 支持Profinet 协议。根据运动控制器设定仅有X150 端口可作为I-DEVICE 设备与倍福IPC 进行数据交换,因此,选用X150 端口作为运动控制器与倍福IPC 的通信端口,选用X127 端口作为计算机调试端口。根据选用端口可配置不同端口的IP 地址,详细的网络配置如图2 所示。
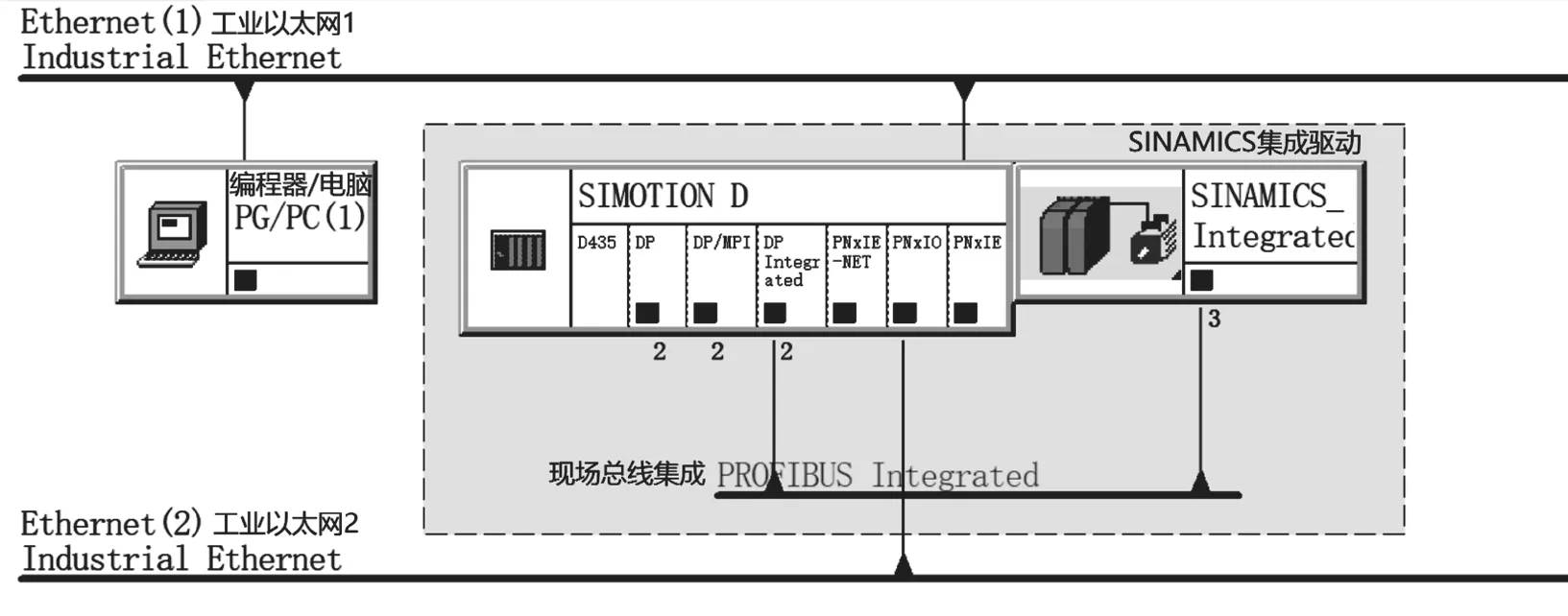
图2 SIMOTION 网络配置图
在图2 中建立了2 个虚拟网络,使网络1 连接到X127 端口,将IP 地址设置为168.254.11.22,使网络2 连接到X150端口,将IP 地址设置为192.168.0.10。
2.1.2 I-DEVICE 输入输出设置
I-DEVICE 又叫做智能设备或智能I/O 设备,其本身是上层I/O 控制器的I/O 设备,又作为下层I/O 设备的I/O 控制器。要实现倍福控制器与运动控制器的通信,必须将X150端口设置为I-DEVICE 模式,同时定义输入、输出地址长度,供之后的通信使用。SIMOTION 运动控制器作为智能设备可以作为I/O 设备连接上层倍福控制器,SIMOTION运动控制器通过接收倍福控制器发出的指令控制电机运动。同时,SIMOTION 运动控制器又将电机运动的过程值反馈给倍福控制器,以判断、发送电机逻辑运动指令,I-DEVICE 的相关设置如图3 所示。
如图3 所示,I-DEVICE 设备须定义输入、输出。将输入、输出各定义为512 个字节供通信使用,创建512 个字节输入、输出变量为测试需求,可根据具体需求自行配置输入、输出。
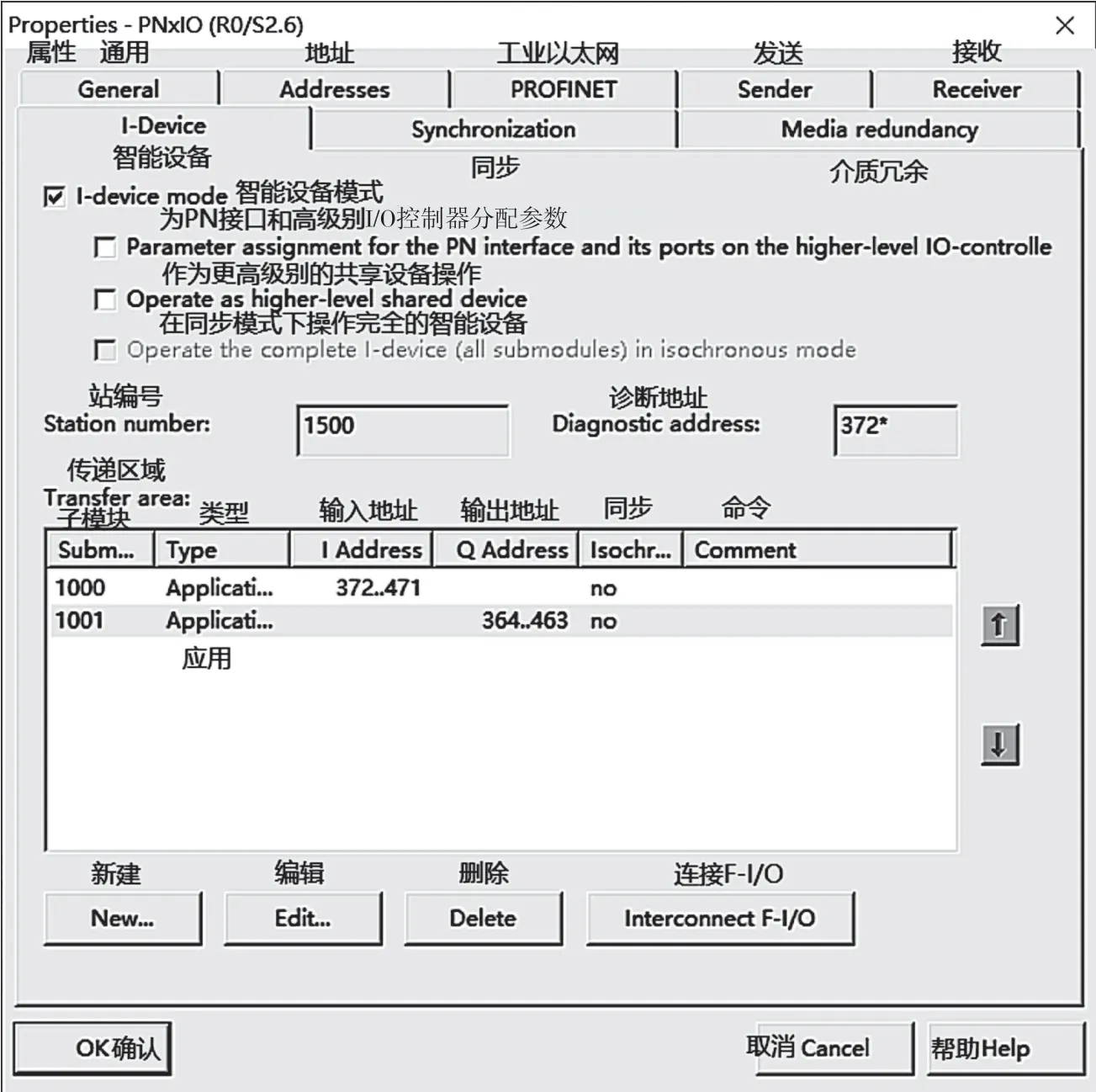
图3 I-DEVICE 设置
2.1.3 GSD 文件导出
当完成网络配置及I-DEVICE 设置后,可通过SIMOTION中的GSD 创建文件功能来生成GSD 文件,然后将GSD 文件导入倍福驱动文件夹供其扫描SIMOTION 设备。GSD 文件创建设置如图4 所示。

图4 GSD 文件创建设置
2.2 倍福IPC 接口设置
完成SIMOTION 接口配置之后,需要在倍福IPC 中配置接口。倍福IPC 接口配置包括GSD 文件导入、添加EL6631以及模块设置[5-7]。
2.2.1 GSD 文件导入
将SIMOTION 运动控制器生成的GSD 文件复制到笔记本的TC3 安装路径:C:TwinCAT3.1ConfigIoProfinet。该步骤为倍福IPC 与SIMOTION 运动控制器通信的必要步骤,如果不进行配置,那么作为主站的倍福控制器就不能对运动控制器进行扫描。
2.2.2 添加EL6631模块
EL6631模块通过E-bus与倍福控制器连接,在TwinCAT3软件中新建项目后,通过扫描硬件功能可以扫描出在倍福控制器下挂载的EL6631 模块,该模块还处于未激活状态,不能进行正常的通信协议转换,需要手动再次添加EL6631 模块并对模块进行配置才能正常使用。因为SIMOTION 运动控制器选用I-DEVICE 模式,可实现实时通信的功能,所以在倍福控制器端需要选择EL6631 模块的RT 版本,使之与I-DEVICE 的实时通信相匹配,这样才能保证对设备运动控制的实时性。
2.2.3 模块设置
手动添加EL6631 后需要对模块进行配置,使EL6631 能够正常识别SIMOTION 运动控制器。对模块的设置包括以下3 个部分:1) 指定其Adapter 为手动添加的EL6631。操作方法如图5 所示。该步骤为必要步骤,如果不选择EL6631 作为适配器,那么将无法扫描SIMOTION 运动控制器。2) 从Device(EL6631) 的Setting 页面设置Profinet 主站IP。需要注意的是,要使主站的IP 地址与运动控制器的IP 地址在同一个网段,只有这样才能保证通信正常。对倍福IPC 主站的IP 地址设定如图6 所示。在Settings 页面中输入需要修改的主站IP,单击Set IP settings 即可修改主站地址。3) 从Device(EL6631)的右键菜单中单击Scan Box。该步骤将扫描到的从站显示在列表中,此时添加从站即可实现正常的通信。4)查看设备的扫描周期并修改PLC 任务周期,使扫描周期与任务周期匹配,保证通信数据传输正常。按照上述步骤正常添加后,在倍福IPC 端应显现在SIMOTION 端所配置的I/O 变量,具体的变量显示如图7 所示。其中,能够显示在SIMOTION 控制器中所添加的512 个输入和输出。
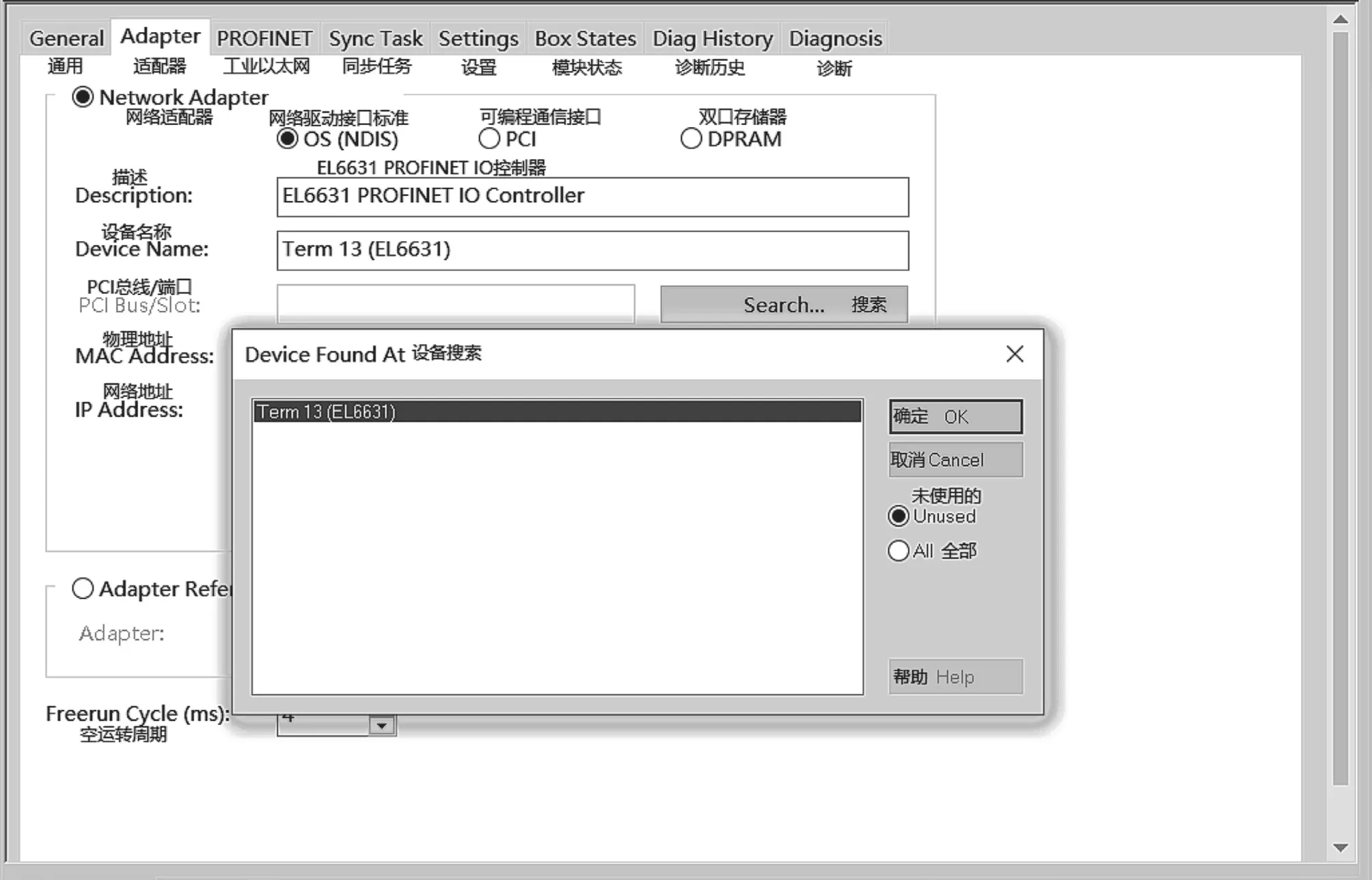
图5 Adapter 设置

图6 主站IP 地址修改

图7 正常添加后倍福控制器中显示的变量
3 通信测试
为了测试倍福IPC 与SIMOTION 运动控制器之间的通信是否正常及通信的实时性,在倍福IPC 端和SIMOTION 端分别选用5 个输入变量、5 个输出变量来进行数据通信,具体变量见表1、表2。

表1 倍福IPC 接收及发送的数据
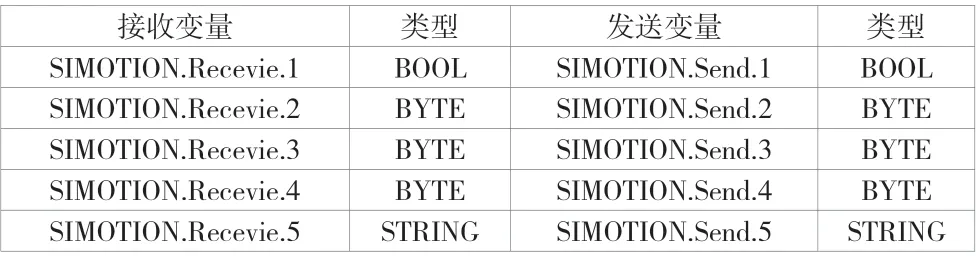
表2 SIMOTION 运动控制器接收及发送的数据
在表1 和2 中,IPC.Send 变量对应SIMOTION.Recevie变量,SIMOTION.Send 对应IPC.Recevie 变量。IPC.Send.1 和SIMOTION.Send.1 发送内容均为1 s 脉冲信号,可以判断系统的实时性;IPC.Send.2-4 和SIMOTION.Send.2-4 发送内容均为16 位进制数字,IPC.Send.5 和SIMOTION.Send.5 为字符串变量,这些变量可以判断数据传递的正确性。
分别将IPC.Send 和SIMOTION.Send 变量写入对应内容,然后观察IPC.Recevie 和SIMOTION.Recevie 的变量显示是否与输入变量一致。经测试,在倍福IPC 和SIMOTION 运动控制器通信正常的情况下,倍福IPC 和运动控制器各自接收的脉冲、16 进制数字及字符串变量均与发送内容相同,倍福IPC 和SIMOTION 之间发送接收数据的实时性和正确性均保持正常。通信测试验证了文中关于倍福IPC 和SIMOTION 运动控制器配置的正确性。目前,基于这2 种通信协议的研究已成功应用于公司生产的装盘机上,该研究也为其他基于EntherCAT 的倍福控制器和Profinet 设备的正常通信提供了支撑。
4 结语
倍福IPC 以其特有的EtherCAT 技术受到越来越多自动化行业的青睐,但是自动化设备的多样性使各个公司的产品不可能全都采用EtherCAT,西门子设备支持的通信协议为Profinet,这就使倍福IPC 的EntherCAT 需要与西门子的Profinet 进行通信,从而保证设备的正常运行。该文对基于EtherCAT的倍福IPC与SIMOTION运动控制器的通信配置进行研究,并通过试验验证了配置的正确性,希望能够为其他自动化人员应用这2 种通信协议提供参考。
猜你喜欢
机械工程师(2021年11期)2021-11-25
船舶与海洋工程(2021年2期)2021-05-26
少儿美术(2021年2期)2021-04-26
成都信息工程大学学报(2017年5期)2018-01-23
电子设计工程(2017年20期)2017-02-10
电子制作(2017年23期)2017-02-02
广东石油化工学院学报(2016年6期)2016-05-17
电测与仪表(2016年2期)2016-04-12
电测与仪表(2014年18期)2014-04-04
电测与仪表(2014年13期)2014-04-04
