
基于LabVIEW的UWB定位系统的优化及应用
2021-03-15 07:01苏俊全张嘉琪谢继标
电脑知识与技术 2021年3期
苏俊全 张嘉琪 谢继标


摘要:由于室内环境的复杂化及障碍物的增多导致了多径效应普遍发生,导致UWB定位的准确性,稳定性和连续性都有所下降。通过TWR测距的双边双向技术进行标签与基站的距离计算,并采用三边测量法进行坐标的位置计算,利用LabVIEW编程软件平台编写测距定位优化系统,对计算出来的坐标数据结果进行平均值计算,以达到所计算的坐标位置数据较原数据相比更加稳定且精确。并在具有四个UWB定位基站和多个标签的仓库环境中进行现场实验,检验优化后结果与实际值之间的误差度,验证了经过优化系统后标签坐标数据的稳定性。
关键词:UWB定位技术;LabVIEW;仓储物流;TWR测距;三边测量法
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2021)03-0239-03
Abstract: Due to the complexity of the indoor environment and the increase of obstacles, multipath effects generally occur, resulting in a decrease in the accuracy, stability and continuity of UWB positioning. Calculate the distance between the tag and the base station through the bilateral two-way technology of TWR ranging, and use the trilateral measurement method to calculate the position of the coordinate, use the LabVIEW programming software platform to write the distance measurement positioning optimization system, and average the calculated coordinate data results Calculate so that the calculated coordinate position data is more stable and accurate than the original data. In addition, field experiments were conducted in a warehouse environment with four UWB positioning base stations and multiple tags to verify the degree of error between the optimized results and the actual values, which verified the stability of the tag coordinate data after the optimized system.
Key words: UWB positioning technology; LabVIEW; Warehouse Logistics; TWR ranging; Trilateral measurement
1 背景
随着无线传感网络(Wireless Sensor Network,WSN)的迅速发展,基于超宽带(Ultra-Wideband, UWB)、蓝牙、RFID(Radio Frequency Identification)等无线定位技术成为研巧的热点[1-2]。与其他的室内定位技术相比,UWB技术是一种传输速率高,发射功率较低,穿透能力较强并且是基于极窄脉冲的无线技术,无载波[3]。这些都是UWB定位系统的优点,这些使UWB在室内定位时可以获得更为精确而稳定的标签坐标数据[4]。然而,由于室内的各种情况导致环境变得复杂,非视距误差及多路径效应广泛存在,UWB 定位的准确度和稳定性较之前相比都有所下降。本文基于LabVIEW对UWB定位进行了优化,并在軟件平台编写数据优化程序,验证了优化后标签定位数据的稳定性,证明了基于LabVIEW对定位系统进行优化的可靠性。
2 UWB系统及定位算法
目前常用的定位算法主要有接收信号到达时间法( time of arrival,TOA) 、信号到达角度法( arri-val of angle,AOA) 、接收信号到达时间差法( time difference of arrival,TDOA)和双向测距法(TWR)[5]。本文选择的是基于DS-TWR测距的 UWB 定位算法,对同步要求较低,在精度上也优于其他定位模式。并且DS-TWR测距不需要测距两设备之间的时延完全相同。
2.1 UWB定位原理
2.1.1 硬件系统
本文的UWB定位系统中硬件系统的构建如图1所示,主要包括一个UWB主基站、多个UWB从基站、多个UWB标签以及为基站标签提供电源的移动电源。本文UWB定位硬件系统的搭建如图1所示:电脑、基站及标签,其中标签和基站采用D-DWM-PG2.5和UWB天线相连接,外观高度约为15cm、宽度约为2cm,通过Micro USB数据线将 D-DWM-PG2.5评估板与 PC电脑连接,并在室内通过基站构建出一个平面坐标系。
2.1.2 软件系统
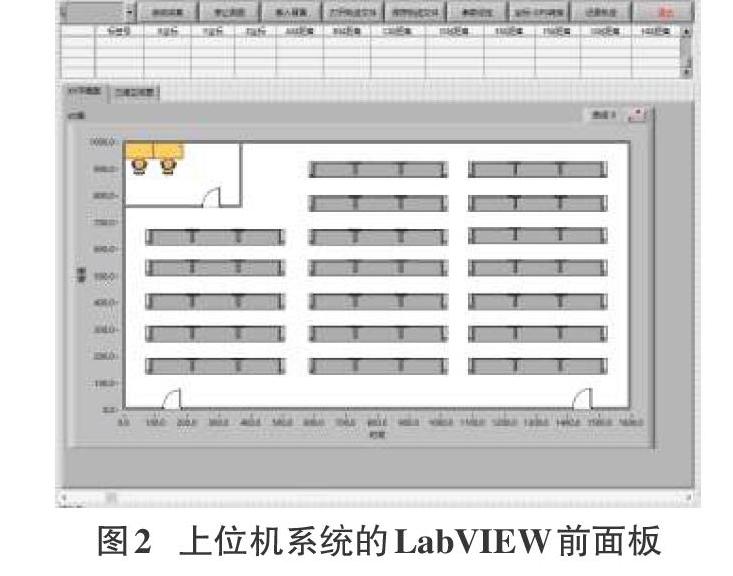
本文通过LabVIEW程序进行上位机系统的编写,软件系统的主要功能是对测距数据的接收并优化,用三边测量法解方程组的方式,求得标签的坐标位置,并对所求标签坐标进行计算优化,使所得标签坐标的误差减少。上位机系统前面板如图2所示,首先启动服务器后,服务器内的数据进行初始化,通过参数设定按钮对各个基站的实际坐标位置进行设定,然后点击开始采集,等待基站发送距离数据,通过三边测量法计算出标签的位置坐标后在进行优化,最后将定位坐标写入数据库。
2.1.3 基本测距原理
由于时钟偏移和频率偏移会使测距的结果产生误差,所以本文采用了双向双边测距(DS-TWR)方法。它可以有效地减少因为频率偏移和时钟偏移所产生的误差。图3显示了双向双面测距的原理方法。
双侧双边测距方法是在单侧双边测距方法的一次通讯基础上再增加一次信号通讯,使之变成两次信号通讯,而因为时钟偏移造成的误差则可以通过这两次信号传输的时间互相弥补。通讯信号飞行时间的计算公式如下:
上位机给基站和标签下达双向测距的指令之后,由基站开始向标签进行第一次发送信号,在定位标签收到信号后则马上对基站进行信号回传,基站收到之后再次向定位标签第二次发送信号[6]。反复如此,然后代入上述公式即可求出通讯信号的飞行时间,之后就可求出基站与定位标签之间的距离。使用DS-TWR测距方法的时钟偏移导致的误差为:
其中[ka]和[kb]分别是基站和标签时钟的实际频率与预期频率的比值。从公示中可以看出,导致测距的误差很少,可以忽略不计。所以本文采用精确度更高的双边双向测距方法,不需要使标签与基站之间的时延完全一致,因此双边双向测距是精准度和稳定度最高的测距方式。
2.2 定位算法
经过近几年的研究发展,一般可以通过两种算法来进行室内定位算法的计算,一种是来进行计算的定位算法,另一种是无须依靠已知基站左边和标签之间的距离信息来进行计算的定位算法。本文采用已知基站坐标和标签之间的距离信息基础上来进行定位计算的三边测量法。
三边测量法如图4所示,其核心思想为:已知主基站A和任意两个次基站B 和 C的坐标信息,令其坐标分别为[x1,y1]、[x2,y2]和[x3,y3]。并且通过TWR测距方法计算出来的各基站与标签之间的距离,令其分别为[R1]、[R2]和[R3]。假设标签坐标为[x,y] 。那么存在下列公式:
3 定位数据的优化
在复杂的室内环境下,由于多路径效应和非视距误差所造成的影响不可避免,会对基站与标签之间的信号传输造成影响,使得到的位置信号误差加大且不稳定。针对这一问题,本文使用LabVIEW软件对所得到的标签坐标数据进行平均值优化,通过提前设置一个平均数阈值和一个变化值,开始定位后,系统开始正常接收串口数据,每接收到一组标签串口数据都会先与上一组数据进行比较,如果各对应数据相比上一组变化没有超过预设的变化值,则会对之前接收的这些数据进行平均值计算,同时这些数据输出在LabVIEW前面板上。反之,当各对应数据相比上一组变化有一个超过预设的变化值,则会从当前这组数据重新进行积累。当接收的标签串口数据组数达到平均数阈值,之后每当新接收一组坐标数据后,系统都会顶掉最前面的一组数据重新选择最新的设定数量的数据组数进行平均值计算,使之组数一直保持在设定的阈值内。平均值计算的系统程序框图及优化前后效果对比分别如图5图6所见,图6表示标签的静态定位坐标结果,横坐标为时间序列,单位是s,纵坐标为两个方向的误差,单位是mm,左图上下分别表示x轴和y轴优化前所测得的坐标数据与实际坐标的相差值,右图上下分别表示x轴和y轴优化后所测得的坐标数据与实际坐标的相差值。可以在图中发现,点位分布更加集中在均值附近,并且随机误差出现次数大大减少,系统优化后所测得的数据更加稳定可靠。
4 UWB定位系统的应用
随着经济的全球化,信息技术的飞速发展和物流活动的日益复杂,仓库物流作为产品分销过程中的核心环节成为企业中的关键一环,通过从分散混乱到实时信息更新,再到仓库管理甚至物流云仓库的发展,自动化和智能化成了仓储物流中的重要性越来越大。UWB系统的精确定位可以应用于不同类型的仓储物流场景,使UWB定位系统与仓储物流管理相结合来达到安全高效的仓库管理。可以将UWB定位系统与AGV小车进行结合,在仓储系统中不断发展来做到更为方便便捷的仓储巡检功能,也可以结合条形码标签,二维码标签,RFID电子标签相结合,将定位标签和条码扫描器设置在AGV小車上,再将二维码等标签设置在货物上,这样就可以做到更高效率的仓储自动巡检。
5 结束语
在室内的复杂环境的影响下,UWB定位系统的信号传播受到影响,以至于所得标签坐标计算结果误差明显且不稳定。本文在具有四个UWB定位基站和多个标签的仓库环境中进行现场实验,通过LabVIEW软件对经TWR测距进行三边测量法计算出来的标签坐标数据进行平均值计算,实验结果显示在静态定位中优化后的坐标数据稳定性较原始数据有明显提升,并将高精准的坐标数据发送到上位机,供其他程序使用。同时,优化后的UWB定位系统可与AGV小车相结合,进行仓储物流的货物巡检,实现无人自动化。
参考文献:
[1] 张威卜长健.基于UWB矿井定位系统的测距优化设计[J].江西测绘,2019(4):17-19,23.
[2] 张强伟.基于UWB的精确定位算法及其数据分析[D].重庆:重庆邮电大学,2019.
[3] 曹保根,满真真,喻锡成,等.基于CSS技术SDS-TWR的舰船舱内报警人员定位系统研究[J].医疗卫生装备,2019,40(2):26-29,51.
[4] 顾衍明.基于UWB的室内机器人定位系统研究与设计[D].哈尔滨:哈尔滨工业大学,2018.
[5] 王春琦,冯大权,何春龙,等.基于UWB的增强非对称双边双向测距算法研究[J].南昌航空大学学报(自然科学版),2019,33(1):66-73.
[6] 殷臻,黄慧哲,李伟,等.基于SDS-TWR算法的TOF精确定位系统[J].实验技术与管理,2017,34(5):95-98.
【通联编辑:谢媛媛】
