组合TDCP和Doppler的GNSS瞬时速度测量方法
2021-03-15 02:35:26李金龙赵得荣
智能城市 2021年3期
李金龙 赵得荣
(1.中交华南勘察测绘科技有限公司,广东广州 510000;2.中国矿业大学环境与测绘学院,江苏徐州 221116)
1 GNSS测速的数学模型
1.1 Doppler测速
GNSS接收机与卫星之前存在相对运动时,接收的载波相位频率与卫星发射的频率之前存在差异,即多普勒频移,其表示载波相位的瞬时变化率。Doppler观测方程可表示为:
1.2 TDCP测速
对相邻历元间的载波相位求差,可消除或削弱各项共模误差,包括电离层延迟、对流层延迟等。假定相邻历元t1、t2处不存在周跳,则TDCP的观测方程可表达为:


式中:R——卫星位置;r——接收机位置;(a,b)——向量a和b的内积。对上述方程线性化,可得出TDCP测速的误差方程式:

式中:vtdcp——载体在相邻历元间的平均速度;Δt——历元间隔;由历元间位移增量vtdcpΔt求取载体的速度仅是历元间的平均速度,在历元间隔较大或者载体动态性较强时,其估计精度将会显著下降。
1.3 GNSS TDCP/Doppler组合测速
针对上述TDCP观测值和Doppler观测值,本文采用高度角模型合理确定两种观测值之间的权值,其定权策略如下:

式中:Elv——卫星的高度角;a、b——定权的精度等级因子,其取值如表1所示。
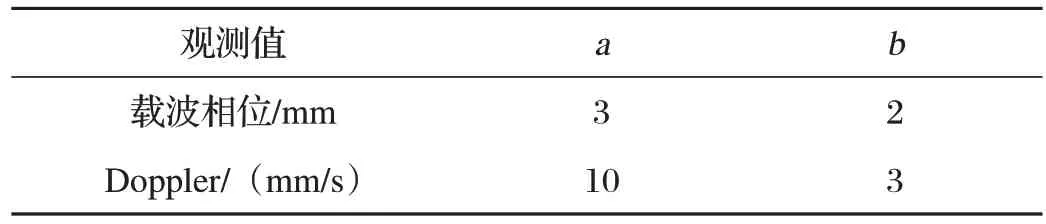
表1 卫星高度角定权的精度等级因子取值
为了使测速中Doppler观测值和TDCP观测值优势互补,将式(2)与式(5)联立,组成TDCP/Doppler组合测速模型,写成矩阵形式如下:
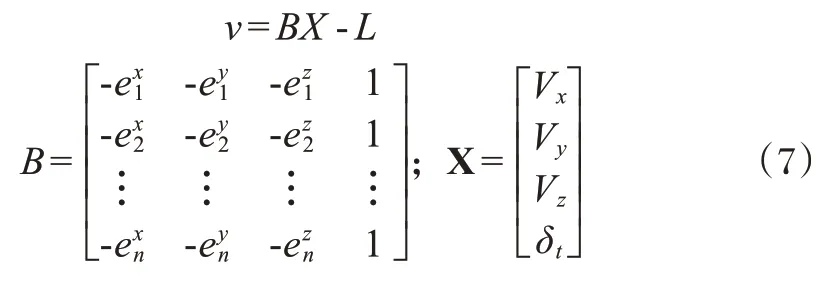
式中:X——待估参数向量,即每一历元处载体的瞬时速度;v——TDCP和Doppler的观测值残差。
对式(7)进行最小二乘估计,可求得载体的瞬时速度。
2 试验分析
试验数据采集于中国矿业大学南湖校区,采集时间为2019年3月28日,由一辆汽车搭载Novatel R10 GNSS 接收机,运动轨迹为绕南湖校区转圈。GNSS观测数据的采样间隔为1 s,共计2 359个历元,本文仅采用GPS观测值进行验证,在观测时段内天空中始终可保持6~10个可见卫星。由于道路两侧的轻微遮挡,将截止高度角设为10°。
为了提供高精度的速度参考真值,汽车上安装了Novatel SPAN CPT惯性导航系统。惯导数据采样率100 Hz,本文利用Inertial Explorer(IE)解算GNSS/INS组合导航数据作为速度的参考真值。100 Hz的参考速度可看作是车辆的瞬时速度,车辆在起步之前,经历了大约600个历元的静止,在启动后即便车辆的运动速度仅维持在-6~6 m/s范围内,但车辆的动态性很强,是由于在数据采集过程中,车辆经历了加速、刹车和转弯等运动状态的变化。
试验对比TDCP测速、Doppler测速和TDCP/Doppler测速等三种测速方案的精度,不失一般性,在地心地固系下展示测速结果。三种测速方案在X、Y和Z三个方向上的测速误差序列如图1所示。
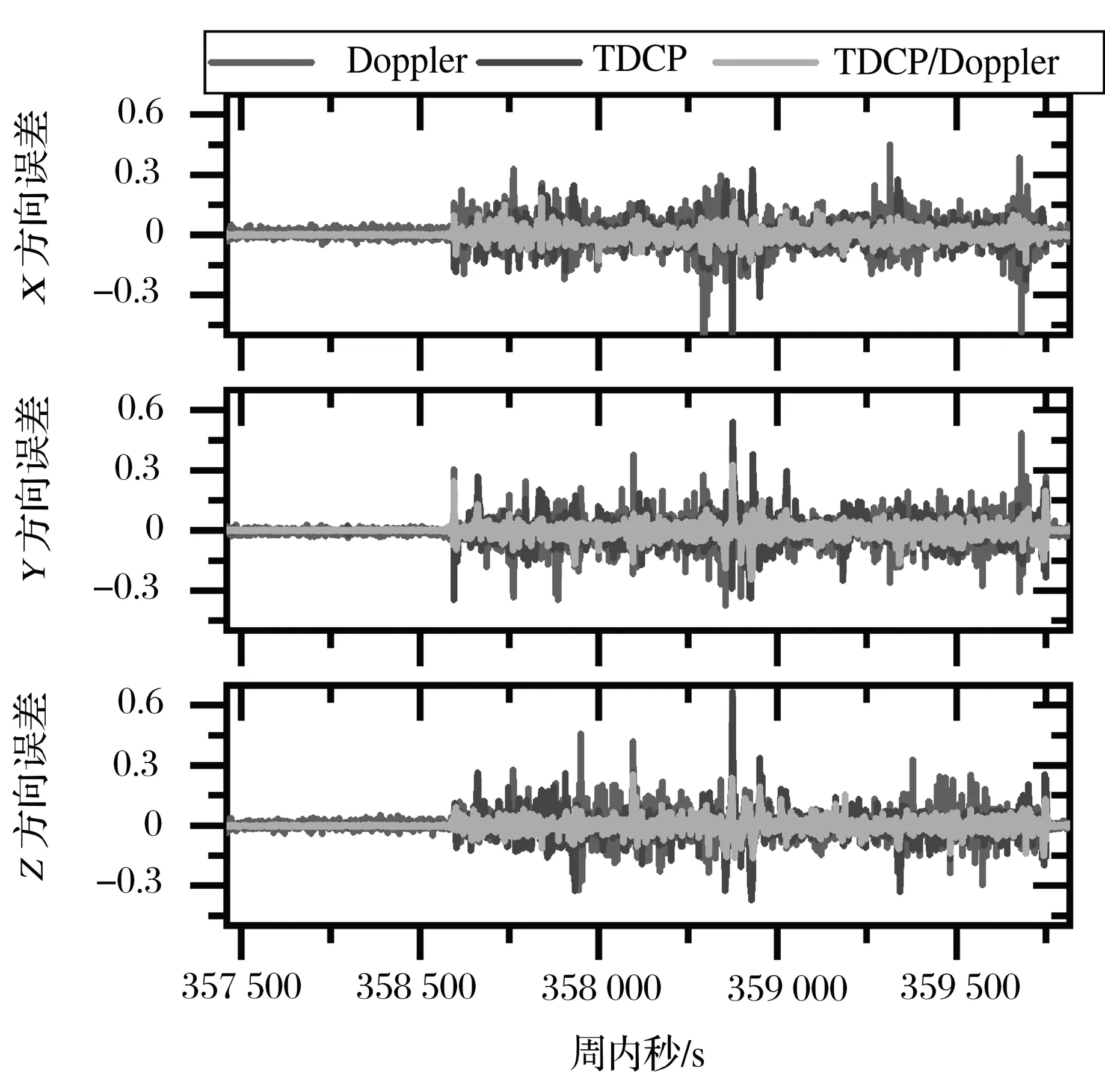
图1 三种方法的速度测量误差
由图1可以看出,三种测速方法在动态情况下均可维持在分米级的精度水平,在静态情况下TDCP测速可达毫米级,其余两种方法可获取厘米级的精度。其次,本文提出的TDCP/Doppler组合测速方案,显著优于其他任意一种测速方案的精度,这种优势在车辆运动的情况下较为明显,这是由于在载体动态情况下,TDCP求取的平均速度相比瞬时速度存在较大的偏差,Doppler观测值针对这种平均速度信息引入了瞬时信息,二者优势互补,提高了速度测量精度。此外,在车辆静止时本文提出的TDCP/Doppler测速精度略逊于TDCP测速,优于Doppler测速,这是由于静止状态下,针对TDCP测速而言,其平均速度即为瞬时速度,且TDCP的测量噪声相Doppler小得多,引入观测噪声更大Doppler观测值会降低测速精度。
三种测速方法精度统计如表2所示。
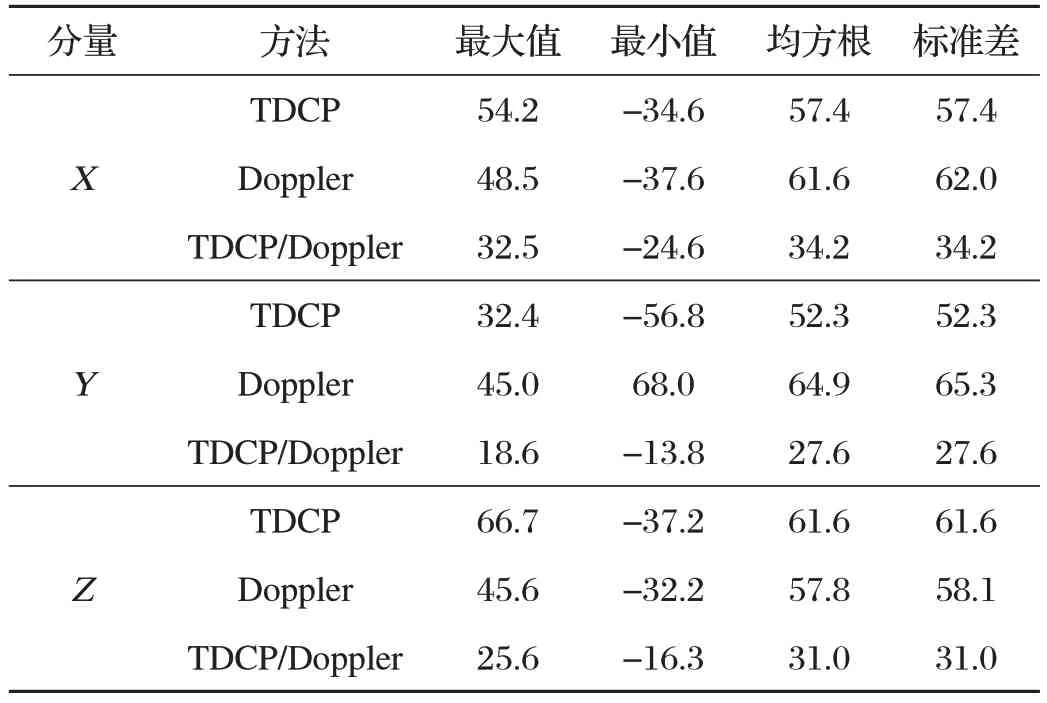
表2 三种测速方法精度统计 单位:mm
表2统计了三种测速方案误差的最大值、最小值、均方根和标准差。由于TDCP、TDCP/Doppler测速误差近似服从正态分布,其误差的均值为0,两种测速方案的均方根和标准差在四舍五入后是一致的。
由表2可知,针对四项精度指标提出的TDCP/Doppler测速均明显优于传统的TDCP测速和Doppler测速。对测速误差的均方根在X、Y、Z三个方向上,TDCP/Doppler测速相比TDCP测速分别提升40%、47%、50%,TDCP/Doppler测速相比Doppler测分别提升44%、57%、46%,提升效果较为显著。
3 结语
TDCP测量噪声小,但存在较大的平均速度与瞬时速度的偏差;Doppler可直接测得载体的瞬时速度,但测量噪声较大。为了发挥TDCP和Doppler观测值的优点,本文提出组合TDCP和Doppler观测值进行GNSS速度测量。通过实测车载1 s采样的GPS数据进行验证,得出如下结论:
(1)在静态情况下,TDCP测速仅受载波相位观测噪声的影响,测速精度可以达到毫米级;Doppler测速、TDCP/Doppler测速精度受Doppler观测噪声的支配,可达到厘米级。
(2)在动态情况下,TDCP测速、Doppler测速、TDCP/Doppler测速均可取得分米级的测速精度。TDCP/Doppler测速误差在最大值、最小值、均方根和标准差等方面,显著优于传统的TDCP测速、Doppler测速。
在RMS上,相比TDCP测速在三方向上分别提升40%、47%、50%,相比Doppler测速在三个方向上分别提升44%、57%、46%。
本文在进行TDCP和Doppler观测信息融合中,按照传统的观测噪声标准差确定二者的权值,实际上对TDCP观测值定权时,应考虑平均速度与瞬时速度间的模型误差,这种模型误差与载体的动态性、采样间隔等因素有关,建模较为复杂,未来将进一步对随机模型的优化展开研究。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:56
中学生数理化·八年级物理人教版(2020年9期)2020-11-16 01:17:58
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:04
自动化学报(2017年2期)2017-04-04 05:14:28
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38