
LCL型三相并网逆变器状态空间模型和控制
2021-03-15 01:53河西学院关虎昌
电力设备管理 2021年2期
河西学院 关虎昌
引言
由于电网对并网逆变器注入谐波的含量有着非常严格要求,必须采取一定措施对谐波进行抑制,需在并网逆变器和电网间串入L 滤波器,对于较小功率并网逆变器采用较高开关频率,可滤除并网逆变器输出的高次谐波成分,但对于较大功率并网逆变器采用较低的开关频率,在并网逆变器的输出侧产生谐波频率较低,在同样谐波标准要求下则需要体积较大的电感,导致系统的重量、体积和总成本增加,同时整个并网系统的动态性能急剧下降。为克服L 滤波器自身的缺陷,高阶LCL 滤波器具有总电感量小、成本低、抑制高频开关噪声高等优点,在电压型并网逆变器中成为主流。然而LCL 滤波器是一个三阶系统,根据LCL 传递函数的波特图可知在幅频特性高频段有谐振峰,相频特性有相位突变,这会对整个系统稳定和性能受到影响,对系统控制器设计提出更高的要求。
为抑制系统的谐振峰,大量文献提出一系列抑制谐振峰技术,从总体可以分为两类:一类采用无源阻尼技术,其实现方式较为简单,在LCL 性滤波器额外增加阻抗构成不同的阻尼结构来实现,但额外的电阻在高压大功率并网逆变器情况下会增加阻尼损耗、且还导致高频段对高次谐波的衰减能力下降;为克服无源阻尼技术的缺点,有源阻尼从虚拟电阻思想解决LCL 滤波器的谐振问题,不会造成额外的损耗,同时保证其高频特性不变。
文献[1]对LCL 滤波器有源阻尼控制机制研究,指出有源阻尼实质上是对系统谐振值附近对应的输出频率成分的反馈控制并解释了基于逆变器侧电感电流、滤波电容电流及其电压反馈控制的有源阻尼技术的本质;文献[2]采用比例谐振控制以及电网电压前馈控制的电容电流与电网电流双闭环控制策略,采用根轨迹方法分析了比例谐振参数的选取以及不同延时对系统稳定性的影响;文献[3]系统性量化分析单相LCL 型并网逆变器的谐波特性,提出重复控制与状态反馈相结合,并加入直流电压和电网电压前馈的方案;文献[4]建立LCL 滤波器的数学模型,提出一种基于电网侧电流外环、逆变器侧电流内环的LCL 并网逆变器控制方法,给出一种基于赫尔维茨稳定性判据及李纳德-戚帕特稳定性判据的内外环控制器参数的设计方案。
文献[5]采用电网侧电感电流和逆变器侧电感电流双闭环控制策略对并网电流进行直接控制,并深入分析了滤波器参数,控制器参数及系统稳定性间的精确量化关系。前述的有源阻尼以传递函数为数学模型,以波特图理论分析,它依赖于可用传感器的信号,然而LCL 的谐振频率与控制频率之比较低、并满足快速上升时间,小的超调量和适当的谐振阻尼以及鲁棒性的要求也是挑战。采用状态空间的极点配置理论能更好的解释系统的动态性能,但如采用全状态反馈会增加传感器的数量、增加系统成本,采用部分状态反馈或无传感器都不能很好抑制谐振峰,观测器能够观测不可测量的值,因此观测器可减少传感器的数量。本文建立LCL 滤波三相并网逆变器的数学模型,根据数学模型对其进行性能分析,利用极点配置的方法使系统能达到最佳动态性能,最后例子说明提出方法的正确性和有效性。
1 LCL 滤波并网逆变器结构和建模
1.1 主电路拓扑结构
本文研究LCL 滤波并网逆变器的主电路结构。图1中Udc是直流电压,VT1~VT6是IGBT 组成三相桥式电路,IGBT 给PWM 脉冲来得到输出电压[uinva,uinvb,uinvc]经过由L1,C,Lg组成的LCL 滤波器接入电网。
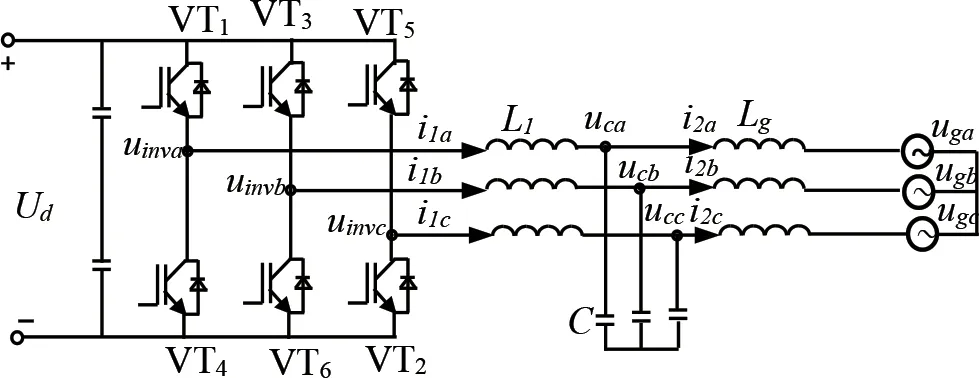
图1 LCL 滤波并网逆变器的主电路结构
1.2 建立LCL 滤波器的模型
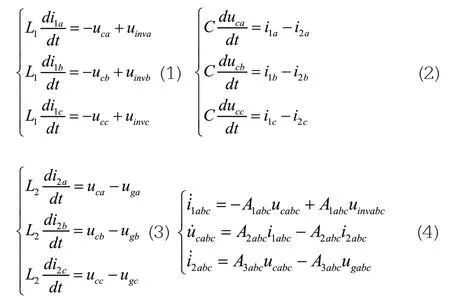
针对如图1所示的系统来建模,选取通过逆变器侧电感L1的三相电流i1abc=[i1a,i1b,i1c]T、滤波电容C 三相电压ucabc=[uca,ucb,ucc]T,电网侧电感Lg的三相电流icabc=[i2a,i2b,i2c]T为状态量。逆变器三相输出电压uinvabc=[uinva,uinvb,uinvc]、电网侧三相电压ugabc=[uga,ugb,ugc]T为输入量,电网侧电感Lg三相电流y=[i2a,i2b,i2c]T为输出量。假设三相电网是对称的,逆变器侧三相电感L1、滤波器三相电容C 和电网侧三相电感Lg都相等。根据基尔霍夫电压电流定律,可得每相abc 坐标系下的微分方程式1~3,得到LCL 滤波器每相静止abc 坐标系下的状态空间模型式4。
状态变量xabc=[i1abc,ucabc,i2abc]T, 输入变量uabc=[uinvabc,ugabc]T,得到三相abc 坐标系的状态空间方程和输出方程式5。

LCL 滤波器在三相abc 静止坐标系的状态变量有九个,且控制量都为交流量,给三相系统控制增加了难度。通过三相静止abc 下的模型变为两相同步旋转坐标系下的数学模型,变换矩阵为式6~7,式1~3变换后得到式8~10。
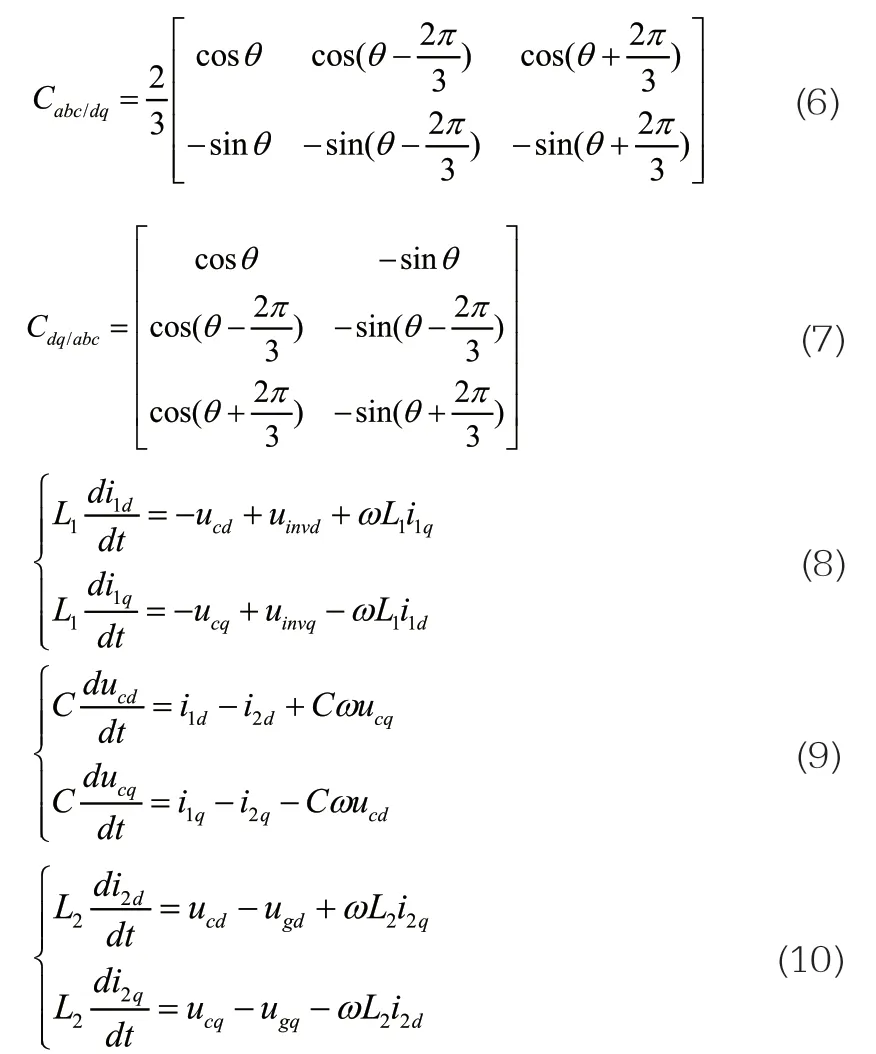
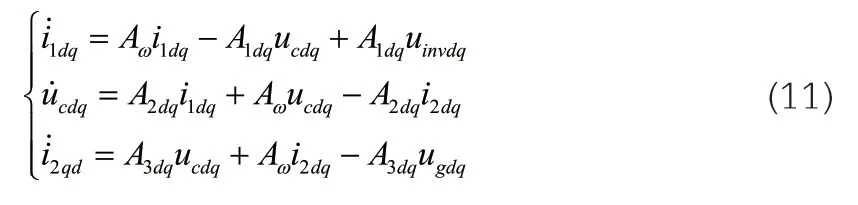
在旋转dq 坐标系逆变器侧电感L1的三相 电 流i1dq=[i1d,i1q]T、滤波电容C 的三相电压ucdq=[ucd,ucq]T,电网侧电感Lg的三相电流icdq=[i2d,i2q]T。逆变器三相输出电压uinvdq=[uinvd,uinvq]、电网侧三相电压ugdq=[ugd,ugd]T为输入量,得到各相在旋转dq 坐标系下的模型式11。

2 系统性能的分析
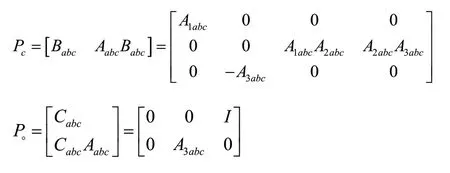
系统能控与能观性分析:系统能控性矩阵为Pc,由于能控性矩阵的秩是3,故系统可控;系统的能观性矩阵为Po,由于能观性矩阵的秩为2,故系统不能完全可观。
系统性能分析:参数选择输入电压uinv=700V, 电网相电压ug=220V, 逆变器侧电感L1=1mH, 滤波电容C=20μF, 网侧电感Lg=300μH,在旋转dq 坐标系下的进行阶跃响应分析。分别得到在谐振频率和电网频率时的阶跃响应和bode 图2~5。
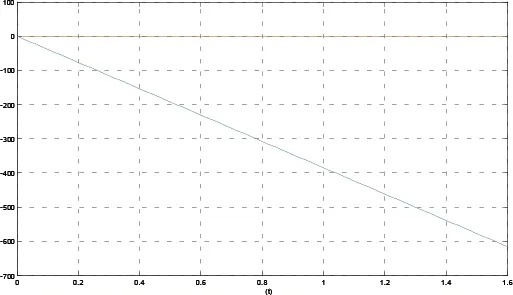
图2 谐振频率的阶跃响应
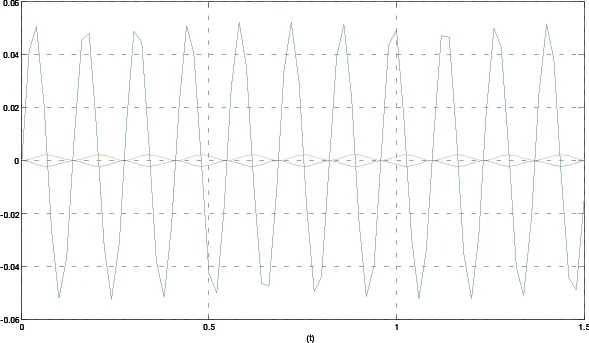
图3 电网频率的阶跃响应
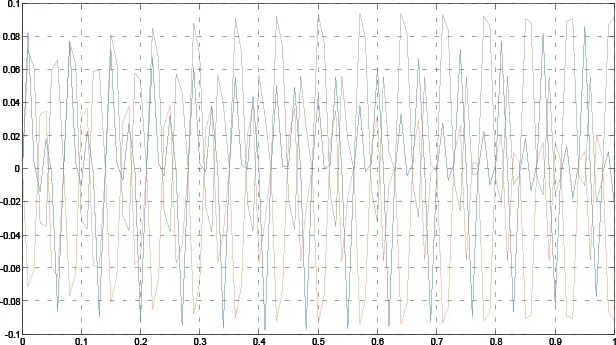
图4 1.5倍谐振频率阶跃响应

图5 系统bode 图
3 极点配置
LCL 是一个在dq 坐标系下是多变量、强耦合的高阶系统,并且是欠阻尼,本文采用基于状态反馈的有源阻尼,先通过解耦,解耦后系统变成一个在不同坐标轴变成三阶系统,再极点配置实现预期的效果,有效解决LCL 滤波器的谐振现象。三阶系统的极点配置近似于二阶系统分析,采用主导极点来选取满足性能的极点,非主导极点取为主导极点离虚轴的距离5~10倍。在极点配置时三相电网电压作为扰动来处理,故不予考虑,使得系统的输出矩阵变为6×2阶矩阵。
满足性能指标要求:阶跃响应的稳态跟踪误差小于2%,阶跃响应的超调量小于15%,调节时间小于0.004s。为了使得系统性能满足要求,希望系统的特征多项式Δ(λ)=(λ2+2ζωnλ+ω2n)(λ+ζωn),其中系统的谐振角频率
4 结语
通过状态空间法对系统进行描述、而不是频率的方法,更能反映实际系统的动态性能,分析了系统在不同电网频率、谐振频率系统的动态性能,表明在不同时间系统特性,更有利于控制器的设计。
猜你喜欢
防爆电机(2020年5期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年12期)2015-04-09
城市轨道交通研究(2015年3期)2015-02-27
电测与仪表(2014年13期)2014-04-04
