
智能网联汽车感知系统电磁兼容分析
2021-03-12 02:26:06张吉宇
电子元器件与信息技术 2021年1期
张吉宇
(柳州汽车检测有限公司,广西 柳州 545000)
0 引言
由于汽车需要在不同的电磁辐射源中工作,相应电控系统的电磁兼容问题也在不断增加。尤其是对于智能网联汽车,利用5G技术建立车联网云端,与智能网联汽车建立智能化的汽车网络,将汽车的驾驶体验提升到一个新的高度,但是也暴露出电子产品的诸多缺点,在电磁干扰环境下智能网联汽车的感知系统就会出现判断失误的问题,这对于严重依赖电控系统工作的智能网联汽车来说是非常危险的。汽车电磁兼容的稳定性一直是学术界和汽车制造业关注的研究课题,因为它直接关系到汽车的安全运行以及消费者对这类产品的信赖程度[1]。
电磁兼容技术大致经历了以下三个阶段:解决问题、标准化规范以及系统工程。其中,系统工程的方法是在系统设计过程中进行全面性管理,从而提高了系统运行的可靠性,具有较高的工程利用价值。但这些传统的分析方法都是以电路计算和发射响应模型分析为基础的,这就需要准确地了解系统中各个元件的详细数学模型。利用这类方法解决汽车的电磁兼容问题是很难反映汽车电子系统的电磁动态特性的,这些方法在研究汽车电磁兼容问题时只考虑到局部变化缺乏对系统整体进行理论化分析,所以分析结果不具有实际价值。如何对汽车复杂的电控系统进行有效的理论分析和预测,是分析汽车电磁兼容的关键所在[2]。
1 智能网联汽车问题分析
1.1 物联网存在问题
从物联网发展之初到现在,我们见证了物联网对汽车制造业的颠覆性改变,最值得注意的是智能通信网络的实现,数据与通信技术已经成为人类生产生活中的重要角色,虽然由于全IP蜂窝系统的存在,人类的互联网服务已变得无处不在,但是开发先进的信息技术仍然具有极大的挑战性,对于应用于智能网联汽车的车联网具有以下缺点:车辆密度可能会随着时间(非高峰时段)和位置(主要街道和次要街道)而急剧变化,并且由于移动或室内/地下停车场,无线通信网络可能会遭受严重的干扰[3]。数据传递和路径规划以及其它与位置相关的数据信息具有极低的延迟容忍能力,而其它信息娱乐应用程序则具有一定的延迟容忍能力。智能网联汽车采用存在干扰的通信网络很难保证汽车具有良好的环境感知使用体验。智能网联汽车可以依靠V2V通信、V2I通信或两者兼而有之。现有的V2V和V2I通信研究主要集中在安全消息广播或信息娱乐服务上,与信息娱乐服务相比,智能网联汽车状态更新的延迟、可靠性和可用性要求更为严格,而这些数据信息可能需要传播更长的距离,而不是仅仅向相邻车辆广播。然而,由于动态拓扑结构、时变通信信道以及异构的V2V和V2I通信技术,高移动性车辆网络的建立是极具挑战性的[4]。
1.2 智能网联汽车环境感知系统
环境感知、路径规划、精准定位、线控执行是智能网联汽车的四大核心技术,环境感知系统的作用就是让汽车拥有自己的眼睛,判断汽车所处的环境位置并进行合理化处理。环境感知系统主要是对行人、周围车辆、行驶路面、交通信号灯、路牌等标志性物体进行简单识别,现在已经有很多电子控制系统运用了环境感知技术,这些系统主要用于提高汽车的主动安全性,降低出现交通安全事故的风险[1]。
环境感知系统可以借助多种途径进行环境识别,最典型的的就是汽车摄像头以及汽车雷达,下面简要介绍几种常用的环境感知设备,首先是毫米波雷达和激光雷达,这两种设备常用于获取汽车车前和车后的距离数据,其中激光雷达具有极高的测量精度,但是对于光照环境变化的感知效果较差,而毫米波雷达具有极强的抗干扰能力,但是对行人的距离感知效果较差。其次是超声波传感器和视觉传感器,超声波传感器可以用于短距离物体的感知而且抗干扰能力较强,但是如果感知物体较大就无法精确探测了;视觉传感器可以采集汽车周围的二维或三维图像信息,而且对数据的处理能力较强,但是容易受到光照影响。
从上面的介绍中可以看出:虽然现有的环境感知设备可以在一定程度上优化驾驶的舒适度,但都存在或多或少的缺点,而且智能网联汽车集成了大量的电子系统,系统与系统,系统与环境之间都存在有电磁干扰的现象,所以如何提升汽车电子器件的电磁兼容能力对于智能网联汽车的发展是非常重要的。
2 电磁兼容分析
2.1 协同理论
协同理论是德国学者哈肯创立的一门综合性交叉学科,它是关于自组织现象出现的条件和规则,在由相似的特征子系统构成的系统中,各子系统之间的相互作用可能导致有序和结构化,系统的熵增会导致无序和混乱,当两种运动均衡匹配时,系统才能达到平衡,否则就会出现临界变化。协同理论就是研究包含随机变量的非线性动力系统的规律,哈肯在协同理论中描述了临界点附近的行为,提出了伺服原理和序参量原理[2]。
对于一个由数量庞大的子系统组成的复杂系统,其演化方程中包含的变量数目非常大,不可能对这些方程进行处理。因此如何简化这些演化方程,用低维方程近似地描述原系统是协同理论的一个重要研究课题。由此开发了一种基本的伺服原理,其核心是近似绝热原理。根据这两个临界阶段的协同理论,得出了当系统处于临界状态时,两个子系统的临界阻尼行为是不存在的。慢参数的数量不多,但它们正驱动着其他快速参数的运动。系统运行的最终状态由它们决定。近似绝热原理是指当系统处于临界阶段时系统快速有序地成形,外界对系统的影响可以忽略不计,但在系统内部如果忽略快速衰减参数的变化方程可以大大简化,然后产生只包含慢参数序参量方程的方程组。这种方法减少了变量的数目,使方程易于求解。
协同理论的序参量原理是指在未进入临界阶段的旧结构下,序参量为0,但在临界相发生时,序参量不是空值。协同学中的序参量具有三个特征共同点:①宏观上描述系统整体行为;②微观上子系统集体运动的协同效应;③控制子系统行为,主导系统演化过程。
2.2 电磁兼容的三个关键要素
任何电磁干扰过程都需要三个要素:干扰源、耦合路径、敏感设备。因此,对于智能网联汽车感知系统的电磁干扰,电磁兼容的三个要素可以用S(t,f,r,θ),C(t,f,r,θ),R(t,f,r,θ)这三个函数来表示,其中时间变量为t、频率变量为f、空间变量为r、方位变量为θ,当发生电磁干扰时,满足干扰源与耦合路径的函数乘积大于等于敏感设备函数。但对于汽车复杂的电子系统,各子系统之间会成为潜在的干扰源。因此,简单地用三个要素来解释汽车电磁兼容问题的工程量是十分巨大的。
汽车电控系统的复杂性是由可实现功能决定的,同时汽车所处的电磁环境也是非常复杂的,随着半导体技术的发展越来越多的集成芯片应用于汽车电磁环境中,使得汽车电磁环境变得更加复杂。汽车所处的电磁环境具有以下四个特点:①汽车是由大量不同种类的零部件组成,这些零部件分布在车身的各个区域,通过CAN总线相互联系;②汽车电子系统作为一个动态系统,具有时间和谐性的特点;③汽车电子系统经常受到不同的干扰,如雷雨天气的干扰、负荷突变、误操作等这些可能会导致交通安全事故;④汽车电子系统中会出现大量高集成度的高频芯片,它将成为一个融合数字和仿真设备的复杂系统。正是由于汽车电子系统具有如此复杂的特性,所以无法用简单的数学模型来描述和分析其电磁兼容问题[5]。
2.3 基于协同理论的电磁兼容分析
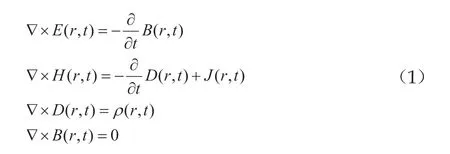
从以上的描述可以明显地看出,汽车电子系统的电磁兼容问题是对系统发生临界变化时的行为的考虑,因此宏观上可以看作是一种接近临界阶段时的稳定问题。以下从麦克斯韦方程组出发,利用协同理论中的伺服原理和序参量原理进行论证。在麦克斯韦方程中,有E、D、H和B四个物理变量来描述电磁场的特性。它们分别代表电场强度、电通量密度、磁场强度、磁通量密度。一般来说,这些物理变量是位置矢量r和时间t的连续函数,电磁场源的电流密度J和电荷密度的平方也是位置矢量r和时间t的连续函数。在上述情况下,麦克斯韦方程组的微分形式如下:
这是电磁场的能量原理。根据傅里叶变换,任意一个随时间变化的电磁场一般都可以看作是不同时谐电磁场的总和,因此任何电磁场的求解实际上都可以归结为求解时谐电磁场。设F(r,t)为角频率为A的时谐电磁场,则函数F可用复形形式表示,并且函数F是一个复向量:

汽车电磁兼容问题实际上是对汽车空间中电磁波能量转换的研究。根据协同理论,选取能流密度矢量作为主要序参量,依次引用三个项参数原理。为了方便计算和理解,这里可以只使用两种变量(S,u)来计算汽车电子系统的电磁兼容性。S是慢参数,u是快速参数。它们是位置向量r、时间向量t、频率向量f和方位向量θ的函数,是电磁兼容分析中三个关键元素的变形。可以将系统演化方程写成如下形式:

公式(3)为汽车电子系统的序参量演化方程,其中,S为主要序参量,α、β是指定算法下的最佳参数。从公式中也可以看出,其它因素的行为也适用于汽车的主要序参量。实际上,能流密度矢量代表电磁波能量的功率电流强度,因此,如果S稳定,则该总标志区的电磁兼容特性是相容的;反之,如果S改变,该总标志区的电磁兼容特性也随之改变。因此,如果S已知,我们可以得到相应区域的电磁兼容定量分析,并根据方程(1)和(3)的计算相关电磁学参数。
3 结论
对于包含多个子系统和传感器的环境感知系统,并且该系统与车联网相连接,其基本电磁方程的变量数目大维度高,对于这样的方程进行求解几乎是不可能的。因此根据协同理论和汽车电子系统的特点,利用麦克斯韦方程,得到汽车电子系统的阶数演化方程,提出了汽车电控系统电磁兼容分析的新思路。
与传统的系统工程电磁兼容分析相比,该方法不仅消除了质量变量的数量,使方程组易于求解,而且能深刻地反映汽车复杂电控子系统协同产生的电磁兼容序参量。电磁兼容分析的序参量控制着子系统的行为,这些行为促使整个汽车复杂电子系统的状态趋于有序,从而达到汽车电磁兼容分析与设计的目的。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
工业经济论坛(2020年6期)2020-04-13 00:38:20
汽车观察(2018年12期)2018-12-26 01:05:26
铁道通信信号(2018年8期)2018-11-10 05:15:44
汽车观察(2018年10期)2018-11-06 07:05:20
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14
