
智能网联汽车基础(二)
——自动驾驶概述
2021-03-11 02:48:24江苏周晓飞
汽车维修与保养 2021年11期
◆文/江苏 周晓飞
(接上期)
一、智能网联汽车核心技术组成
智能网联汽车智能驾驶的核心技术由环境感知系统、智能决策系统以及控制和执行系统组成(图1)。
汽车在行驶过程中通过传感器自行感知周围环境及道路上各种信息,并依据感知信息完成处理、融合过程,形成对全局的理解,进一步通过各种算法决策如何应对,最后将决策信息传递给各控制系统形成执行命令,完成驾驶动作。
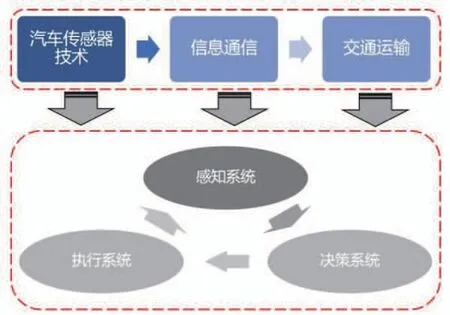
图1 智能网联汽车核心技术组成
1.环境感知系统
环境感知指对于整个驾驶环境的场景认知能力,是对障碍物、道路标志、交通标线、车辆、交通信息等数据的语言分类。
环境感知系统的主要功能是通过车载环境感知技术、卫星定位技术、4G/5G及V2X无线通信技术等,实现对车辆本身和外界(如道路、车辆和行人等)静、动态信息的提取和收集,并向智能决策系统输送信息。
智能网联汽车自动驾驶常用的环境感知传感器有摄像头、毫米波雷达、激光雷达、超声波雷达和红外传感器等等。
2.智能决策系统
决策规划是智能网联汽车的关键之一。智能决策系统的主要功能是接收环境感知层的信息并进行融合,对道路、车辆、行人、交通标志和交通信号等进行识别,决策分析和判断车辆驾驶模式和将要执行的操作,并向控制和执行层输送指令。比如从A地到B地,需要通过一系列规划的算法,包括地图的建立,避障等,最后选择一条最优化的路线,这就是决策规划。
3.控制和执行系统
控制执行系统的主要功能是根据功能决策的指令对车辆进行操作和协调,为联网车辆提供道路交通信息、安全信息、娱乐信息、救援信息、商务信息、在线消费等,以保证安全可靠、舒适驾驶。
二、智能驾驶技术形态
智能网联汽车的终极目标就是实现不附条件的完全自动驾驶或无人驾驶。汽车驾驶自动化、自动驾驶、无人驾驶这三个概念其实是不在一个技术等级。汽车驾驶自动化包括应急辅助、部分驾驶辅助和组合驾驶辅助,但自动驾驶的技术层次更高一些。而无人驾驶是完全的车辆为主体的自主驾驶,可以没有外置操纵机构(方向盘和加速和制动踏板)。
三、自动驾驶术语
1.自动驾驶功能
自动驾驶功能(automated driving function),在GB/T中规定的3级及以上驾驶自动化功能的总称,包括有条件自动驾驶、高度自动驾驶和完全自动驾驶功能。也就是说,只有这三种等级的驾驶模式才称之为自动驾驶(功能)。
2.自动驾驶模式
自动驾驶模式(automated driving mode),由自动驾驶系统执行全部动态驾驶任务的模式称为自动驾驶模式。
3.动态驾驶任务
动态驾驶任务,英文dynamic driving task,简称DDT。动态驾驶任务是除策略性功能外,完成车辆驾驶所需的感知、决策和执行等行为。包括但不限于车辆横向运动控制;车辆纵向运动控制;目标和事件探测与响应;驾驶决策;车辆照明及信号装置控制。
①策略性功能包括导航功能,如行程规划、目的地和路径的选择等任务。
②动态驾驶任务包括所有实时操作和决策功能,由驾驶员或驾驶自动化系统完成,或由两者共同完成。
4.动态驾驶任务接管用户
动态驾驶任务接管用户,英文DDT fallback-ready user。
当3级驾驶自动化系统工作时,可以识别驾驶自动化系统发出的接管请求和明显的动态驾驶任 务相关的车辆故障,并执行动态驾驶任务接管的用户。
①该术语适用于3级驾驶自动化功能,4级和5级没有这个角色。动态驾驶任务接管用户可以在车内或车外。
②动态驾驶任务接管用户在执行部分或全部动态驾驶任务时成为驾驶员。
四、智能网联汽车自动驾驶分级
智能网联汽车针对自动驾驶不同功能分级,目前国际公认的汽车自动驾驶技术分级标准分别由美国高速公路安全管理局(NHTSA)和国际自动机工程师学会(SAE)所提出,其中SAE提出的分级标准为主流常用标准J3016-201609。
现在更符合我国实际的国家标准《汽车驾驶自动化分级》在2021年8月20日正式发布,2022年3月1日我国将正式实施拥有我们自己的自动驾驶汽车分级标准。
1.自动驾驶等级划分要素
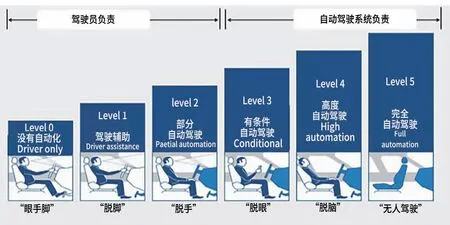
图2 自动驾驶等级划分示意图

表1 自动驾驶等级划分要素
表1、图2自动驾驶等级划分中:①我国标准参考SAE J3016的0-5级的自动驾驶分级框架。按照我国标准和SAE J3016标准,对每个具体的驾驶自动化功能分级结果基本是一致的。
②SAE J3016将AEB等安全辅助功能和非驾驶自动化功能都放在0级,叫无驾驶自动化,我国的标准叫应急辅助,作为一个安全的基础分支,和非驾驶自动化功能分开,逻辑上更合理。
③我国标准在3级中明确增加对驾驶员接管能力监测和风险减缓策略的要求,明确最低安全要求,减少实际应用的安全风险。
自动驾驶等级划分示意图,如图2所示。
2.我国自动驾驶等级划分
(1)0级驾驶自动化(应急辅助)
驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。
①0级驾驶自动化不是无驾驶自动化,0级驾驶自动化可感知环境,并提供报警、辅助或短暂介入以辅助驾驶员(如车道偏离预警、前碰撞预警、自动紧急制动等应急辅助功能)。
②不具备目标和事件探测与响应的能力的功能(如:定速巡航、电子稳定性控制等)不在驾驶自动化考虑的范围内。
(2)1 级驾驶自动化(部分驾驶辅助)
驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。
对于1级驾驶自动化,驾驶员和驾驶自动化系统共同执行动态驾驶任务,并监管驾驶自动化系统的行为和 执行适当的响应或操作。
(3)2级驾驶自动化(组合驾驶辅助)
驾驶自动化系统在其设计运行条件内持续地执行动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。
对于2级驾驶自动化,驾驶员和驾驶自动化系统共同执行动态驾驶任务,并监管驾驶自动化系统的行为和执 行适当的响应或操作。
(4)3级驾驶自动化(有条件自动驾驶)
驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务。
对于3级驾驶自动化,动态驾驶任务接管用户以适当的方式执行动态驾驶任务接管。
(5)4级驾驶自动化(高度自动驾驶)
驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
对于4级驾驶自动化,系统发出接管请求时,若乘客无响应,系统具备自动达到最小风险状态的能力。
(6)5级驾驶自动化(完全自动驾驶)
驾驶自动化系统在任何可行驶条件下持续地执行全部动态驾驶任务和执行动态驾驶任务接管。
①对于5级驾驶自动化,系统发出接管请求时,乘客无需进行响应,系统具备自动达到最小风险状态的能力。
②5级驾驶自动化在车辆可行驶环境下没有设计运行条件的限制(商业和法规因素等限制除外)。
五、智能网联汽车网联化分级
按照智能网联汽车的交互信息、参与协同控制的程度,智能网联汽车网联化可划分为三个等级,目前基本处于2级发展阶段。智能网联汽车网联化等级划分如表2所示。
(未完待续)
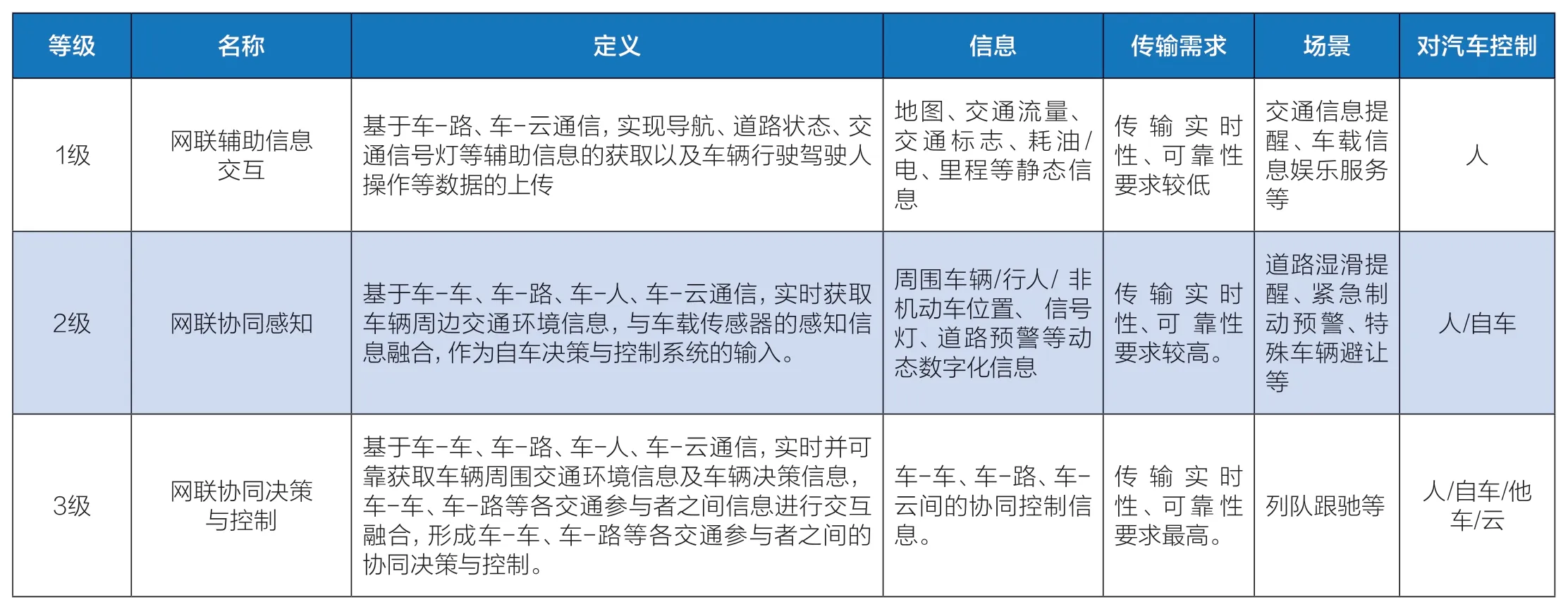
表2 智能网联汽车网联化等级划分
猜你喜欢
河北理科教学研究(2021年3期)2022-01-18 05:34:24
发明与创新(2021年39期)2021-11-05 07:15:28
纺织科学研究(2021年9期)2021-10-14 08:52:10
工业经济论坛(2020年6期)2020-04-13 00:38:20
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:34
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
汽车文摘(2015年11期)2015-12-02 03:02:53
