基于改进型混合粒子群算法的船舶航向控制
2021-03-11 03:34胡春洋胡杰贾文鹏
电子技术与软件工程 2021年21期
胡春洋 胡杰 贾文鹏
(中船航海科技有限责任公司 北京市 100070)
目前航运业在全球经济一体化影响下发展的朝气蓬勃,由于船舶的自身运动惯性较大,时滞性强,加之在海上航行时,风、流和浪对船舶航行的干扰是无规律的导致航向不易控制[1]。为解决上述问题,PID 控制算法应运而生。其控制简单,控制效果好,应用广泛。但PID 参数整定需要按照方法查各种表,还要根据建立的数学模型做人工调整[2]。这个过程需要反复调整,时间较长,而且最终得到的很可能也不是最优的参数[3]。如果输入的变量很多,那么调节的可能性组合就会随之变多,这个工作常常不是非专业人士所能胜任的[4]。
粒子群优化算法可以不需要知道内部原理来调整PID 参数,而且调整的思路是朝着参数最优的方向进行,寻优速度快,所得结果精度高[5]。但是标准粒子群算法易陷于局部极值,针对此问题,很多学者提出了各种改进型粒子群算法。任子武等[6]在算法中引入变异因子,对每次迭代过程中得到的最优粒子进行变异,使其跳出局部最优;金翠云等[7]考找出每次迭代中位置最差的粒子,对其位置值进行更新,防止陷入局部最优;南杰琼[8]利用正弦变化规律来动态调整粒子的惯性权值,在搜索初期加大粒子群的全局搜索能力。改进型粒子群优化算法的目的都是为提升粒子的全局搜索能力,加快了粒子群优化算法的收敛速度为目标。
1 船舶运动数学模型
实际中船舶运动数学模型比较复杂,需要综合考虑舵机、舵、风、流等因素,得出非线性模型。为简化计算,便于研究,本文以野本数学模型作为船舶模型进行航向控制研究[9],该模型将复杂的非线性模型化简为较为简单的一阶数学模型,如式(1)所示。

野本把船舶的转向运动看成是一个大质量物体的缓慢转首运动,因此船舶的转向运动方程可以用一个惯性环节来表示,式(1)中T 称为稳定性参数;K 为回转性参数,这两个参数可以通过船舶的“Z”形试验测得。
2 改进型混合粒子群算法
粒子群优化算法(PSO)是一种利用种群进化理念形成的一种计算技术,最初源于对鸟群捕食行为的研究。该算法的核心思想是利用群体中粒子的相互协作,共享信息,不断趋向食物,从而得到最优位置值。
粒子群算法将粒子模拟为鸟群中的鸟,朝着食物前进,不断更新粒子的速度和位置,粒子间也会进行沟通交流。每个粒子会把自己所经过位置的最优值记录下来,通过和种群中其他粒子的最佳位置值进行对比,得到相对最佳位置值,然后根据该值进行自身的速度优化和位置优化,继续朝着最佳位置前进[10]。在整个过程中,粒子不断调整自己的位置和速度,去趋向食物所在的方向。粒子通过下面的公式来更新自己的速度和位置。

在公式(2)和(3)中,i=1,2,3……N,N 是此群体中粒子总数;vi是粒子的速度;rand()是介于(0,1)间的随机数;xi是粒子的当前位置;c1和c2是学习因子;vi的最大值为Vmax(大于0),如果vi>Vmax,则vi=Vmax。公式(2)由三部分相加得到,第一部分为粒子的自身惯性,保留上次的速度值;公式(2)的第二部分为粒子最优值,表示粒子已运动过的位置记录,是目前得到的粒子的位置最优值;公式(2)的第三部分为社会因子[11],是整个粒子群中的位置最优值,粒子间通过相互交流分享比较,得到了整个种群的最佳位置,代表粒子群的运动方向和趋势。由于公式(2)易陷入局部最优,需对其进行改进,改进后如下式所示:

其中,w 为惯性因子,其值为非负。若其值较大,则全局寻优能力强,局部寻优能力弱;若其值较小,则全局寻优能力弱,局部寻优能力强。粒子群算法在迭代的过程中部分粒子有时会反向运动,这是由于粒子的惯性速度过大导致的,在迭代点附近,如果惯性因子过大,会导致很长时间无法收敛到一个点,同时也很难找到相比上一次迭代更优的解。为了解决该问题,本文采用随着迭代次数增加减小惯性因子的策略,如下式所示:

式中,i 为当前迭代次数,n 为总代数。将式(5)应用到式(4)中,增强了粒子的全局和局部搜索能力。
同时,继续对标准粒子群算法进行改进,将社会因子分解为了两部分——局部社会因子和全局社会因子,如下式所示:

全局社会因子代表粒子的速度矢量向全局最优解方向运动,而局部社会因子则代表该粒子在局部范围内在朝着最优的方向运动,是该粒子一定范围内的最优解,一般这个范围是固定的,而包含的粒子数量(如果为1,则是粒子本身)不确定。
式(4)和式(6)的区别在于,式(4)收敛速度快,但是对于多极值问题容易收敛到一个局部最优解;式(6)由于要计算局部最优解,导致收敛速度相对较慢,但可以很好地解决式(4)收敛到局部最优解的问题。
3 PID参数整定
确定参数整定过程中的评价函数,本文选取绝对误差时间积分(ITAE)指标PID 控制器的性能评价指标,如式(7)所示:

式(7)中,Jmin越小,代表系统性能越好。
基于改进型混合粒子群算法的船舶航向控制原理图如图1所示。
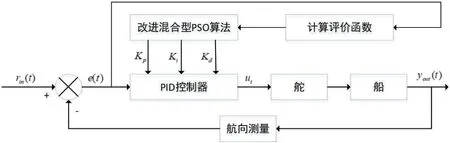
图1:MPSO-PID 控制算法原理图
由图1可知,PID 控制算法为:

e(t)为输入与输出之间的误差,ut为控制对象的输入,t 为时间常数。
对PID 参数的寻优,就是利用本文提出的算法对式(7)求最小值的过程。其中粒子的位置信息代表PID 三个参数值,寻优的过程中,每次迭代都会产生一组最优的粒子位置信息,该信息中包含了单个粒子的最优值和整个种群的最优值,算法的不断迭代就是寻找最优值的过程。在整个寻优过程中,当求得式(7)的最小值或达到终止条件时,会产生一个相对位置最佳的粒子,该粒子的位置值即代表了PID 参数的最优值。
Step1:初始化粒子群,设置迭代次数,种群大小,飞行速度限值[Vmin, Vmax],位置限值[xmin, xmax];
Step2:将初始化的粒子的位置值作为粒子的最优值,计算每个粒子的评价函数值,得到最小的J 值,并将其作为全局最优值;
Step3:根据公式(5)计算粒子的权重值,并带入式(6),计算得到粒子的速度值;
Step4:将式(6)得到的结果带入式(3)中,得到粒子的位置值,如果粒子的速度vid>Vmax, vid=Vmax;vid<Vmin,vid=Vmin;xid<Xmin,xid=Xmin;xid>Xmax,xid=Xmax;
Step5:更新完粒子的位置和速度值后,将每个粒子的位置值与Step2 中的pbest 比较,从而更新个体最优值;将每个粒子的最优值与Step2 中的J 值比较,从而更新全局最优值。
Step6:判断是否达到终止条件,否,则跳至Step2,继续循环执行,反之跳出循环;
Step7:达到终止条件时,得到全局最优粒子,该值的位置值即为全局最优PID 参数值。
4 仿真研究
采用MATLAB 仿真试验,对本文提出的算法进行验证。设置系数c1=c2=2,惯性权重取值wmin=0.3,wmax=0.9;粒子的初始位置设置为[0,0,0],最大位置为[30,0.5,120];迭代次数设为100,粒子的飞行速度取值范围为[-1,1]。选取“育龙”号为研究对象,控制对象的数学模型选取Nomoto 模型:

式中,∅表示船舶航向角,δ 表示舵角,T、K 为系统参数,K=0.42,T=261.73,结果如图2-图4所示。

图2:航向控制效果图
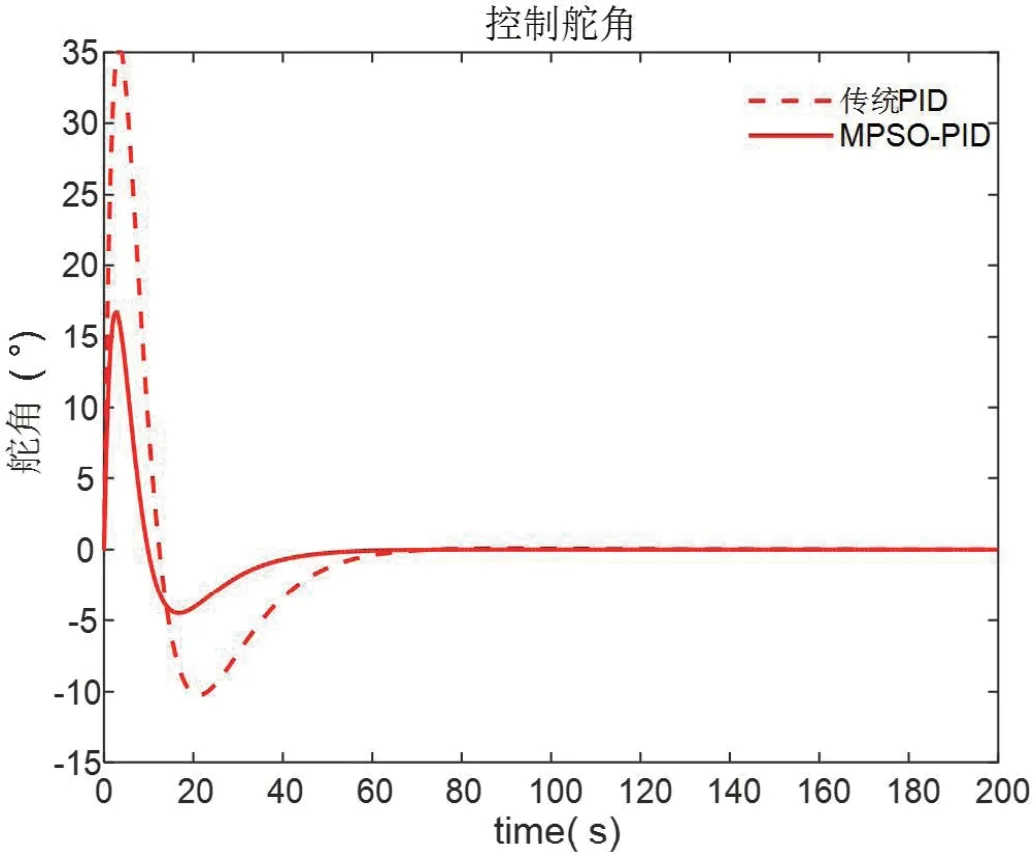
图3:控制舵角图
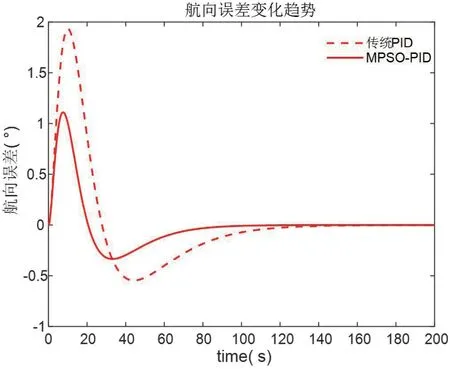
图4:航向误差图
5 结论
本文采用改进型混合粒子群算法优化PID 参数,将寻优后的控制效果与手工整定的控制效果进行对比,MPSO-PID 算法跟踪速度更快,控制精度更高,且无超调,打舵幅度更小,跟踪误差更小。证明了该算法的可行性与实际可操作性,无工程经验人员也可实现良好的控制效果。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
金桥(2018年4期)2018-09-26
电子制作(2017年24期)2017-02-02
小学科学(学生版)(2016年1期)2016-10-09
法大研究生(2015年2期)2015-02-27
中国卫生(2014年5期)2014-11-10