家居环境检测助老服务机器人的设计
2021-03-11 03:34戴文娟韩慧敏吴育军
电子技术与软件工程 2021年21期
戴文娟 韩慧敏 吴育军
(海南科技职业大学机电工程学院 海南省海口市 571126)
基于近几年中国机器人及人工智能大赛助老类服务机器人试题,为满足家庭对家居环境检测及家居智能化控制的需要,设计一款以智能家居为平台搭建“用户-环境-产品”的助老服务机器人。该机器人与物联网智能家居实现互联互通,可实时对家中多个房间的室内环境状况进行监测,并可自由控制或人机语音交互控制家居设备,调整家居环境舒适情况,解决了老年人对家居环境控制不便的实际需求。在设计及产品调试的过程中,有效地提高学生的动手操作能力,综合能力及创新能力。
1 机器人外观结构
机器人主体框架由底盘、轮、质金属杆件拼装组成,通过车底的四个轮子来移动和承重。其整体结构如图1所示。
2 电子电路系统
2.1 系统硬件设计
本设计的智能家居助老服务机器人,以四轮驱动小车为平台,由底盘系统、电控系统组成。底盘系统由转向机构、传动机构、差速机构、悬架等组成。电控系统采用STC8A8K64S4A12281/PWM系列单片机为核心控制部分,由电源模块、驱动模块、AI 模块、E32 通信模块、SYN6658 语音模块、传感器模块组成。可以实现路径规划、转向、测速、实时显示探测参数的功能及控制等功能。硬件系统框图见图2。

图2:硬件系统框图
2.2 单元电路设计
2.2.1 电机驱动模块
采用的TB6612FNG 是一款具有大电流MOSFET-H 桥结构的直流电机驱动器件,双通道电路输出,可同时驱动2 个电机,无需外加散热片,只需外接电源滤波电容就可以直接驱动电机。
舵机也叫伺服电机,由直流电机、减速齿轮组、位置反馈电位计、舵盘和控制电路等组成的自动控制系统,其外部机械设计简单、力矩大、体积小、稳定性高。可通过编写程序,发送信号连续控制其转角,实现智能小车的转向功能。
2.2.2 AI 模块
本设计采用百科融创嵌入式小车语音模块,内置离线语音识别引擎,运行深度神经网络算法,支持本地语音识别、本地语音合成、中文普通话识别、方言识别和远讲语音识别;支持高灵敏度数字麦克风录音,通过稳态、动态噪音过滤算法调整录音音量,利用语音增强算法过滤原始语音数据,利用离线式语音识别引擎识别高信噪比的语言数据,保证了不同距离(远讲)识别的高精准度和抗噪能力。语音模块见图3。

图3:百科融创嵌入式小车语音模块
2.2.3 E32 通信模块
本设计采用E32-433T20DC 模块,嵌入高速低功耗单片机和高性能LoRa 扩频芯片SX1278,采用循环交织纠检错编码,使其抗干扰性、灵敏度及高效性能等都大大提升。其发射功率为100mW,超低功耗,无线唤醒功能,LoRa 扩频功能使其通讯距离大大提升。此外还具有:定点发射、广播监听、前向纠错、休眠功能、看门狗、参数保存、抄表行业等特点。
2.2.4 SYN6658 语音模块
通过UART 接口或SPI 接口将主控制器和SYN6658 语音合成芯片连接在一起。控制命令和文本可由主控制器通过接口发送至SYN6658 语音合成芯片,被SYN6658 语音合成芯片接收,经过语音合成,再经功率放大器放大,并连接到喇叭进行播放。
2.2.5 传感器
(1)MQ-2 烟雾气敏传感器模块。
MQ-2 烟雾传感器使用电导率较低的二氧化锡为材料,其电导率随空气中可燃气体浓度的增加而增大。MQ-2 气体传感器对甲烷的灵敏度高,对天然气及液化石油气也具有较好的灵敏度。
(2)光照传感器(GY-302 光强度光照度模块 BH1750)。
光强度光照度模块 BH1750,内部由光敏二极管、运算放大器、ADC 采集、晶振等组成。PD 二极管通过光生伏特效应将输入光信号转换成电信号,经运算放大器放大后,ADC 采集电压,经逻辑电路转换成16 位二进制数,并存储在内部寄存器中。光越强,光电流越大,电压越大,所以通过电压大小就可以判断光照大小。
(3) 温湿度传感器(SHT21 传感器模块/GY-213V-SHT21)。
SHT21 是一款嵌入回流焊的双列扁平无引脚DFN 封装的湿温度传感器集成芯片。配有全新设计的CMOSens®芯片、标准能隙温度传感器元件和改进的电容式湿度传感元件,使其性能在高湿环境下更稳定。测温范围:-40℃-125℃,湿度范围:0-100%RH。
3 软件设计
3.1 控制策略
控制系统驱动小车,通过烟雾气敏传感器模块、光照传感器模块及温湿度传感器检测环境,并根据检测结果,实现对目标的控制,或者通过语音识别指令实现对目标的控制。
其控制情况为:
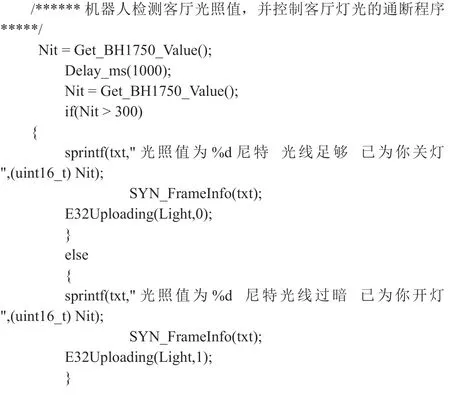
当光照传感器检测到光照值小于300 尼特时,机器人打开客厅灯;光照值大于300 尼特时,机器人关闭客厅灯光;
(1)当温湿度传感器检测到温度大于22℃时,机器人打开卧室空调/风扇,温度小于22℃时,机器人关闭卧室空调/风扇;
(2)当烟雾气敏传感器检测烟雾时,检测其输出电压值小于0.9V,机器人控制电磁阀关断;输出电压值大于0.9V 小于1.1V,则二氧化碳浓度偏高,机器人打开电磁阀;输出电压值大于1.1V 浓度超高,机器人打开电磁阀;
(4)可以通过语音交互的对话方式来实现对客厅灯光、卧室空调/风扇、厨房电磁阀开关控制。
3.2 程序设计
助老机器人集成环境检测和控制功能,能对室内光照值、温湿度值、二氧化碳浓度等进行检测,并对客厅灯光、卧室空调和厨房电磁阀进行自动控制。此机器人采用C 语言编写应用程序。程序流程图见图3,人机语音交互流程见图4。

图3:程序流程图
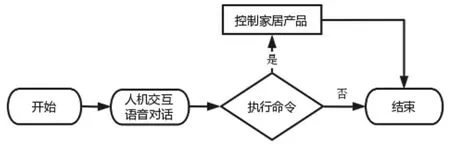
图4:人机语音交互流程图
机器人检测室内环境及智能控制的部分程序如下:


4 实验结果
(1)机器人能够与家居设备互联,实现智能化控制。
(2)机器人自主检测客厅光照度数值为112 尼特,并通过语音播报光照度数值,通过判断112 尼特<300 尼特,机器人能自主控制客厅灯光打开。
(3)机器人自主检测卧室温度为33.70℃,湿度为60.19 百帕,语音播报温湿度数值,判断温度33.70℃>22℃,机器人能自主控制卧室空调打开。
(4)机器人能自主检测电压值小于0.9V,语音播报二氧化碳浓度良好,机器人自主关闭厨房电磁阀。
(5)能够语音播报各检测数值;能够识别语言指令,并进行相应的控制动作。
5 结束语
家居环境检测和智能控制的助老服务机器人,给人们的生活带来了便利性和舒适性。同时也给老年人行动不便及未来人口老龄化服务等问题,提供一个可行性的方案,具有广阔的发展前景。本文设计智能家居助老服务机器人外形美观度不够,其智能化水平还可以多集成更多的其它功能,程序仍可以继续优化。未来仍需继续加深这方面的学习,继续改进升级。
通过参加竞赛,家居环境检测助老服务机器人的设计,不断扩宽学生对智能控制技术和传感器技术等知识的广度和深度,综合考察学生对电路、设计、编程等知识的综合运用能力,培养了学生分析问题解决问题的能力,及创新思维。
猜你喜欢
装备制造技术(2021年5期)2021-08-14
装备制造技术(2021年1期)2021-05-21
中国民政(2019年12期)2020-01-02
漳州职业技术学院学报(2019年1期)2019-11-16
今日农业(2019年16期)2019-09-10
电子制作(2018年11期)2018-08-04
电子测试(2018年9期)2018-06-26
西安工程大学学报(2016年6期)2017-01-15
环球时报(2009-01-09)2009-01-09
雕塑(1999年4期)1999-06-28