调频连续波雷达技术与图像识别技术的定位避障方法
2021-03-11 03:34吴辰斌楼铁城何磊周韫捷蒋晓娟
电子技术与软件工程 2021年21期
吴辰斌 楼铁城 何磊 周韫捷 蒋晓娟
(国网上海市电力公司 上海市 200120)
随着电缆隧道的普及和发展,电缆隧道中存在的隐患越来越多,通常以日常巡检的方式来保证电缆隧道的可靠运行。目前,大部分电缆隧道的巡检由人工完成,由于电缆隧道内设备数量众多、分布点多、总里程长,导致了监控信息量大、监控距离长、巡检周期短的特点。同时电缆隧道具有易积水、易产生有害气体、空气不易流通、高电压、高辐射等问题,使得人工巡检工作变得异常艰难,迫切需求电缆隧道巡检机器人替代人工巡检。在这样的背景之下,使用机器人代替人类进行隧道巡检成为隧道巡检自动化的研究热点,在隧道的复杂环境下,提升机器人对于定位及避障功能极为重要。
1 基于调频连续波雷达的定位功能
调频连续波雷达是调频连续波雷达,发射的信号是线性调频连续波或线性调频序列,其频率随时间变化的特征遵循锯齿形。[1]通过产生线性调频信号以放大并从发射天线发射信号。雷达照亮的区域中的任何物体都会将传输的信号反射回去。将反射信号与本地振荡器信号混合会产生拍频(中频IF 频率)输出,该输出将被数字化,然后在DSP 中进行处理。
图1显示了接收到的调频连续波雷达信号,该信号包括与各种对象相对应的已发送信号的不同延迟和衰减副本。从图1中可以看到,与每个对象相对应的拍频信号是一个音调(忽略线性调频信号的开始和结尾处的边缘效果),其频率与物体距离雷达的距离成正比。检测物体(目标)及其与雷达的距离的过程涉及对拍频信号进行FFT,并识别出本底噪声突出的峰值。频率信号还具有多普勒分量,该分量取决于雷达与目标之间的相对速度[2]。查看拍频信号从一个线性调频脉冲到另一个线性调频脉冲的相移,可以估算出多普勒信号,从而可以估算出相对速度。这通常是通过对线性调频脉冲执行第二次FFT 来完成的。检测过程包括对与每个线性调频对应的接收样本执行一维FFT,然后跨线性调频对该输出进行二维FFT,2-D FFT 过程的结果是距离-速度网格中目标的图像。检测过程通常是在此2-D FFT 输出上执行的,并且涉及检测本底噪声或周围杂波中的峰值。另外,对于检测到的物体,使用具有多个TX / RX 天线的数字波束成形来执行角度估计过程。因此,调频连续波雷达可以提供其照亮的场景的3D 图像(距离,相对速度和到达角度)。
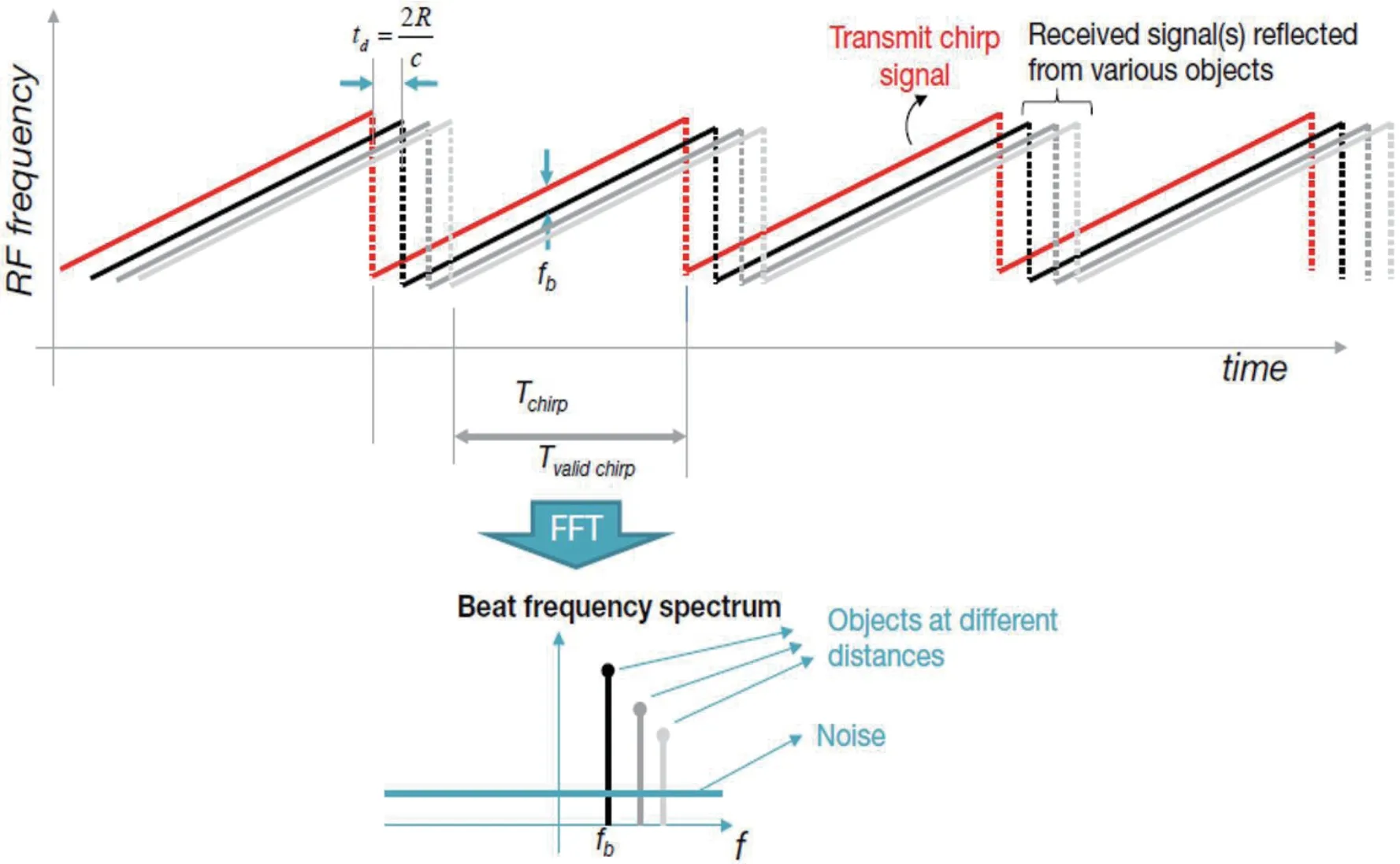
图1:接收到的调频连续波雷达信号和拍频频谱
二维FFT 处理程序适用于使用快速调频连续波雷达调制的雷达实施方案。快速调频连续波雷达调制的主要优势之一就是将各种物体的距离和速度自动解析为2D 图像。高效的2D FFT 处理方法可以准确估计每个物体的距离和速度,而不会产生歧义。[3]快速调频连续波雷达调制的其他优点包括:来自各个物体的拍频信号高于闪烁噪声转折频率。此外,在芯片上实现模拟基带所需的低通和高通滤波器可减少外部组件的数量。
四足机器人在电缆隧道中行进,面对隧道中复杂的情况,需要实时对周围的物体进行定位,为了能够更好的划分近距离的目标,就必须具备更高距离分辨率、速度分辨率和角度分辨率,并为对象识别/分类提供信息。例如,较高的空间分辨率(距离和角度分辨率)可以帮助识别两物体之间的间距,或者识别附近有小物件的情况。同样,高距离和速度分辨率可以帮助专门识别移动物体。影响距离分辨率的主要因素之一是线性调频脉冲的射频扫描带宽。距离分辨率与RF 扫描带宽成反比。
虽然更宽的RF 扫描带宽可以提高范围分辨率,但通常会导致更长的线性调频持续时间。这可能会限制使用2-D FFT 处理可检测到的最大速度,因为较长的线性调频脉冲会导致对多普勒频移的采样不足。在不影响最大速度的情况下,支持快速的斜坡斜率对于实现更高的范围分辨率至关重要。虽然斜坡越快,范围分辨率和最大速度越好,但它会导致更高的斜率。虽然更快的斜坡斜率可以提供更好的测距分辨率和最大速度,但对于给定的物体距离,它会导致更高的拍频。因此,支持更宽的IF 带宽将有助于确保不会因模拟基带中的IF 带宽受限而损害雷达可以检测到物体的最大距离。[4]
2 基于图像识别的避障功能
摄像头为智能分析提供了一种低成本的手段来捕捉许多场景。前置摄像头可用于自动巡航控制捕捉实时情况,以帮助保持与障碍物的最佳距离。前置摄像头还可以用于四足机器人运动辅助,以保持四足机器人在隧道中心,以及物体检测。摄像头背后的分析是使汽车具有类似视觉功能的原因,实时视觉分析需要对摄像机的每一帧进行分析,以提取正确的信息进行智能决策。他不仅需要巨大的计算能力,以在瞬间处理数据,使四足机器人能够做出正确的激动,他还需要广泛的I/O,以提供来自多个摄像机的视觉分析引擎输入,以实现同时关联。低功耗、低延迟和可靠性也是四足机器人视觉系统的关键方面。
四足机器人采用的视觉加速器包含一个或多个嵌入式视觉引擎,为嵌入式视觉系统提供可编辑性、灵活性、低延迟处理、电池效率以及较小的芯片面积。一个视觉优化的处理引擎,包括一个32 位专用RISC 处理器和一个512 位矢量协处理器。[5]处理器包括32KB 的程序缓存,以实现高效的程序执行,提供了768 位宽的组合内存带宽,同时具备96KB 的L1 缓存,以使数据传输的延迟极低。每一个嵌入式视觉引擎具有一个专用的直接内存访问(DMA),用于与处理器内存之间的数据传输,以及一个内存管理单元(MMU),用于地址转换和内存保护。为了实现操作的可靠性,每一个嵌入式视觉引擎在所有数据存储器上配备了一位错误检测功能,并在程序存储器上配备了两位错误检测功能。而视觉加速器的关键体系结构是DMA、RISC CPU 以及处理引擎(VCOP)的完全并发。视觉加速器如图2所示。
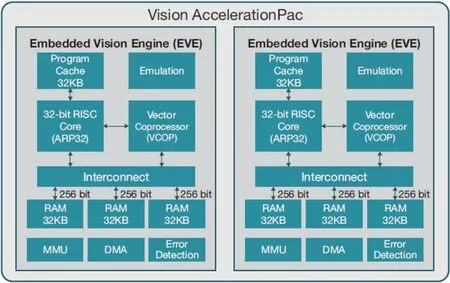
图2:视觉加速器
一个典型的视觉分析处理过程包括如图3所示的几个阶段,包括图像预处理和特征检测、识别目标物体、图像和模式匹配以及最后的决策。四足机器人经过优化设计,可以在视觉分析处理的前三个阶段中减轻密集计算的负担。决策通常涉及分类器、浮点运算和矩阵转换。
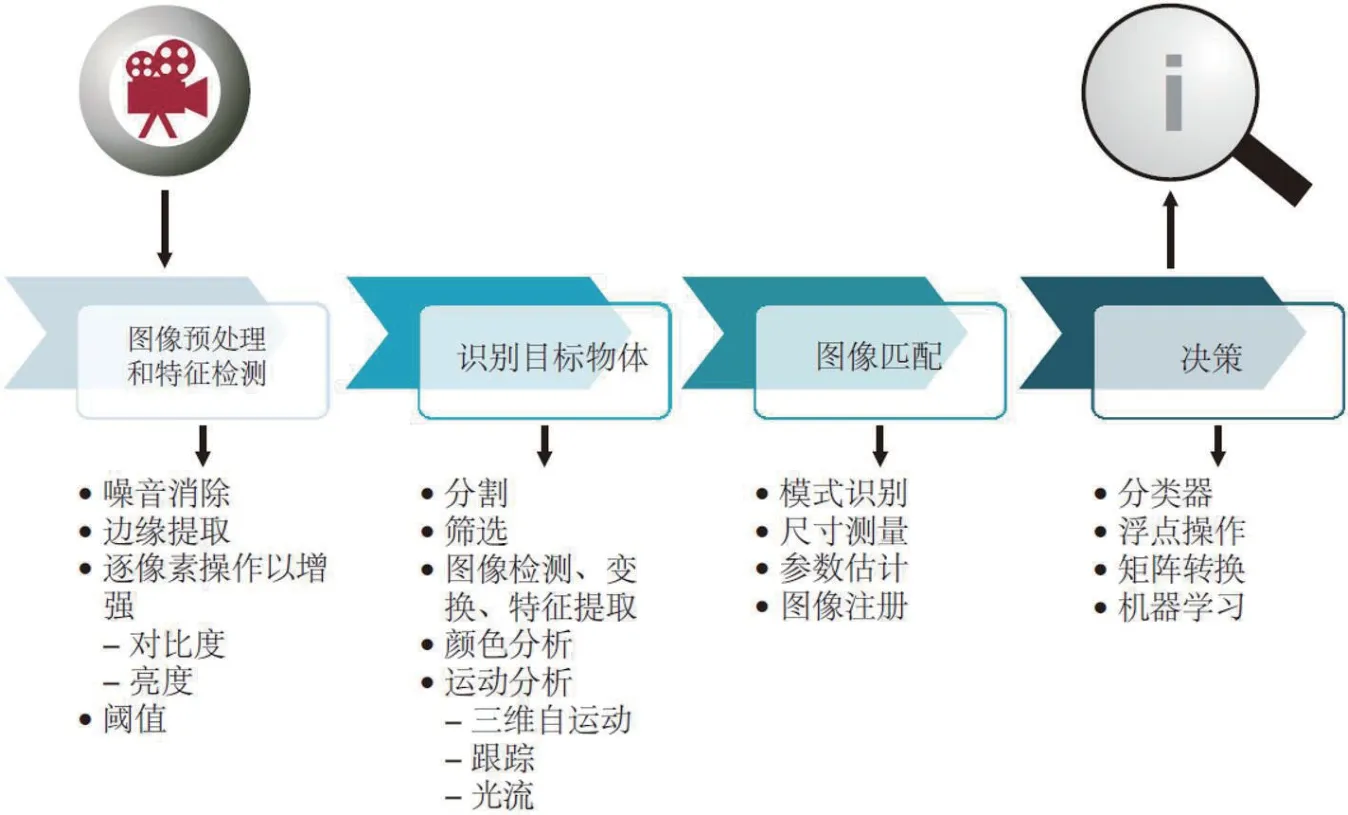
图3:视觉分析处理流程
以瓦楞纸箱为例,瓦楞纸箱的边界通常是黄色矩形,所以第一步是从输入数据中提取仅为黄色的像素。接下来是使用亮度和对比度确定黄色边界的水平和垂直渐变的计算,然后利用霍夫变换算法以找到矩形。最后使用储存在数据库中的图案将目标图像关联起来,以解析最终识别目标物体,并最终得到决策。借助图像识别功能,四足机器人实现了自动对摄像头中的物体进行识别和分析,最终实现避障功能。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
能源工程(2021年5期)2021-11-20
数学物理学报(2019年3期)2019-07-23
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
海军航空大学学报(2015年4期)2015-02-27