风力发电机组塔架净空优化的变桨控制方法
2021-03-09 09:42杨娟霞李强赵树椿肖飞
新型工业化 2021年1期
杨娟霞,李强,赵树椿,肖飞
(北京金风科创风电设备有限公司,北京 100176)
0 引言
风电是实现绿色低碳发展和生态文明建设目标的关键支撑。2020年“风能北京宣言”中指出,在“十四五”规划中,须为风电设定与碳中和国家战略相适应的发展空间:保证年均新增装机5000万千瓦以上。2025年后,中国风电年均新增装机容量应不低于6000万千瓦,到2030年至少达到8亿千瓦,到2060年至少达到30亿千瓦[1]。提升技术经济竞争力是风电实现规模化、平价化发展的主要方法,高可靠性和低度电成本是评价风力发电机组竞争力的重要指标。更大叶轮直径,轻量化叶片是降低机组成本的有效手段,同时也面临着严峻的挑战,在极端风况下,长柔叶片的形变更大,增大了叶片塔架碰撞的概率。因此,塔架净空是长柔叶片开发中考虑的关键因素。
针对长柔叶片的塔架净空约束问题,国内外学者从不同的角度探索了保护优化方案。文献[2]从基于可靠性的风机设计角度阐述了概率方法的应用,包括关键失效模式极限状态的建模、不确定参数的随机模型、可靠性估计方法等方面,和传统的设计方法IEC61400-1[3]相比,是一种更经济的设计方法。针对塔架净空的保护也有相关的方案:文献[4]通过传感器测量出叶尖在面外的形变,作为控制系统的反馈信号,设计了独立变桨算法,不仅可以提升净空,还可以降低机组关键部件的疲劳载荷。专利[5]中根据测量的机组运行值和叶片负载值估算塔架净空,当检测到塔架净空低于某个阈值时,为三个不同的桨距设置提供单独的桨距指令以避免极小净空事件发生。以上已有方法理论相对复杂,鲁棒性较差,工程化实现困难。
综上分析,本文提出了一种风力发电机组净空优化的变桨控制方法,基于仿真平台评估了该算法的有效性,并在样机上进行了测试。结果表明:该方法可以有效提升塔架净空,避免在极端风况下叶片和塔架碰撞,保护机组的安全。
1 净空优化控制器设计
1.1 风力发电机组塔架净空特性分析
以一大叶轮机组的仿真结果为例,如图1(a)是IECdlc12正常发电工况的塔架净空随风速的变化特性,图1(b)是叶轮面推力-风速相关性,针对该机型,在9m/s附近叶轮面的推力达到最大,塔架净空最小。参考风力发电机的转矩-转速运行特性图1(c)所示,风速在9m/s附近,叶轮的转速达到额定转速nr,还未变桨,此时叶轮面受到的推力最大,叶片的变形最大,塔架净空最小,变桨以后,塔架净空增大,如图1(d)。因此,在塔架净空较低时,可以通过增大桨角减小叶轮面的推力,从而避免塔架净空的持续下降。
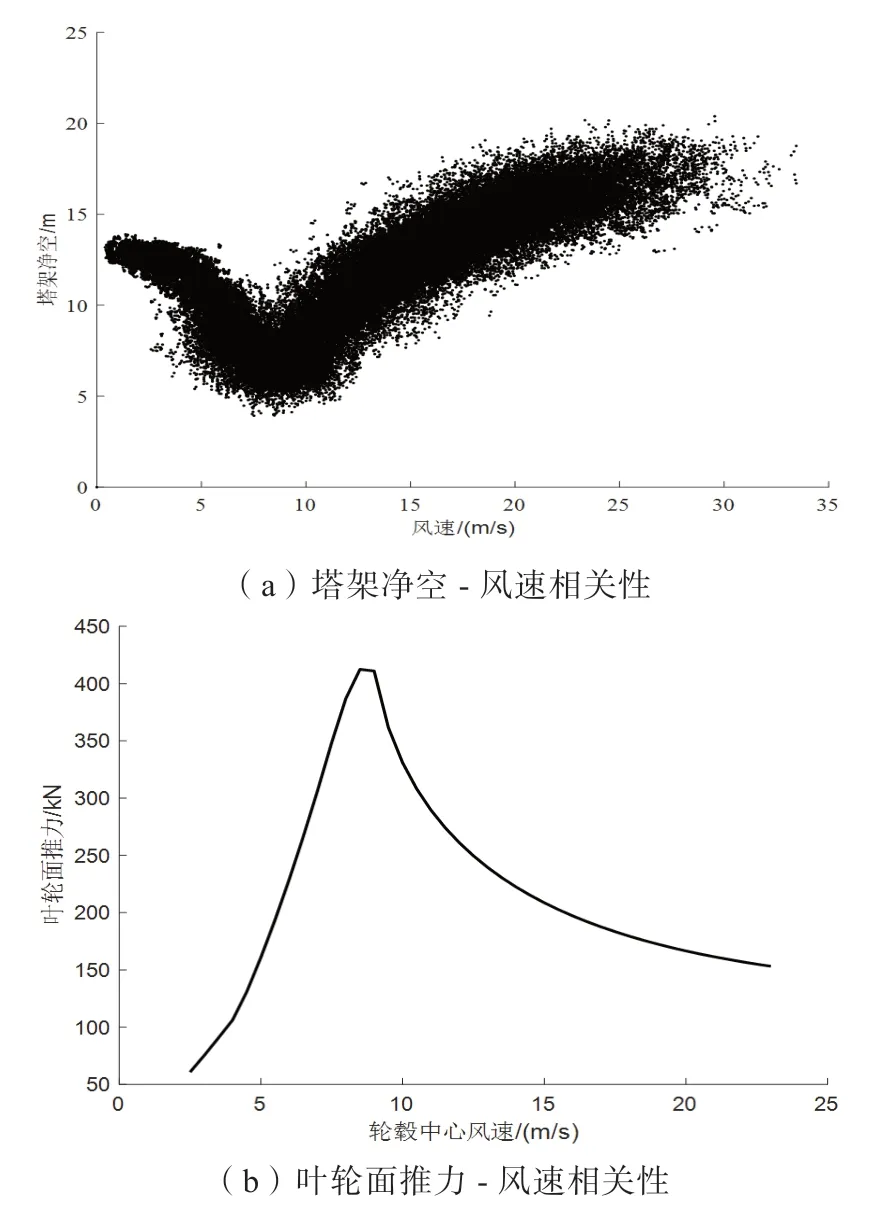
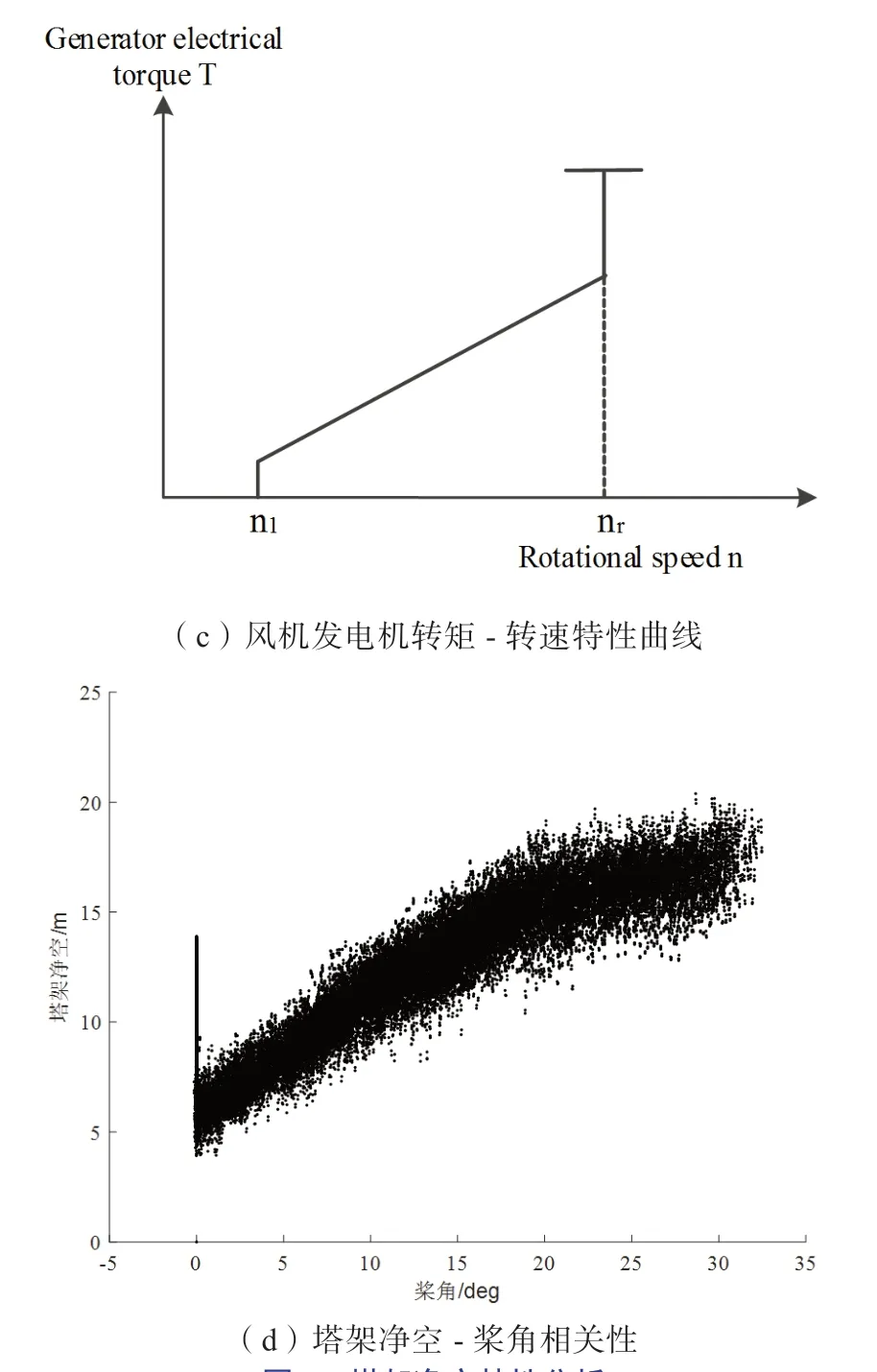
图1 塔架净空特性分析
1.2 基于测量净空的变桨控制器设计
如图2是风力发电机组塔架净空系统拓扑图,其中101是塔架净空监测采集装置,部署于合适的位置,可以选择机舱下方。当叶片旋转至最低点时,该采集装置实时检测并计算塔架净空值。102是风力发电机组控制系统,计算的塔架净空数值实时传入控制系统,实施变桨控制保护。
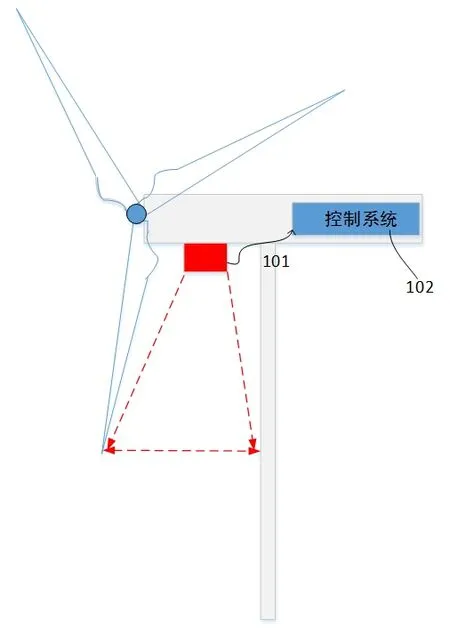
图2 塔架净空系统拓扑图
变桨控制是风力发电机闭环控制的主要部分,经典变桨控制内容可以参考文献[6]。考虑净空优化的变桨控制器如图3所示,其中,基于测量净空的桨角补偿器逻辑如图4所示。
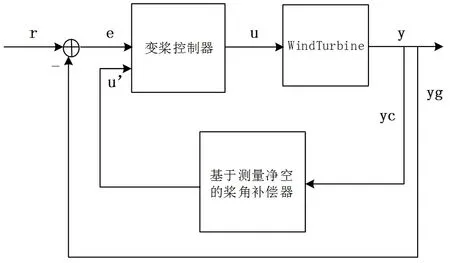
图3 净空优化变桨控制器
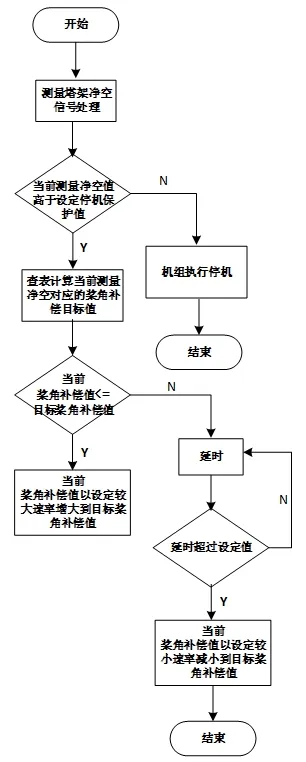
图 4 基于测量净空的桨角补偿器
图3中,yg是风力发电机组转速信号,yc是测量塔架净空信号,r是目标转速信号,e是转速偏差信号,u’是基于测量净空计算的桨角补偿量,u是变桨控制器最终输出的桨角给定值,在稳定转速的同时,改善塔架净空。
图4中,首先对测量的塔架净空信号进行处理,获取测量净空有效值,如果测量净空低于机组停机保护值,立即执行停机保护;否则,基于当前测量净空查表计算得到桨角补偿量。基于测量净空的桨角补偿器输出动态桨角补偿值,从而在净空低的时候适当提升桨角,提升塔架净空。
2 仿真评估及载荷影响分析
2.1 仿真评估
本文以ETM(Extreme Turbulence Model)和EWS(Extreme Wind Shear)两种极端风况下的仿真结果为例说明第1章中描述的变桨控制器对净空的优化效果。ETM和EWS分别是文献[3]所述标准中定义的极端湍流风和极端风剪切工况。仿真控制器基于C++环境开发。
ETM风况的仿真结果如图5所示:5(a)是极端湍流风,风速的均值是9.41m/s,湍流是29%;5(b)是测量塔架净空信号;5(c)是桨角补偿器以测量的净空信号为输入计算的桨角补偿量;5(d)是开启桨角补偿器前后的桨角对比;5(e)是开启桨角补偿器前后的最小净空对比,开启以后,最小净空提升1.4m。
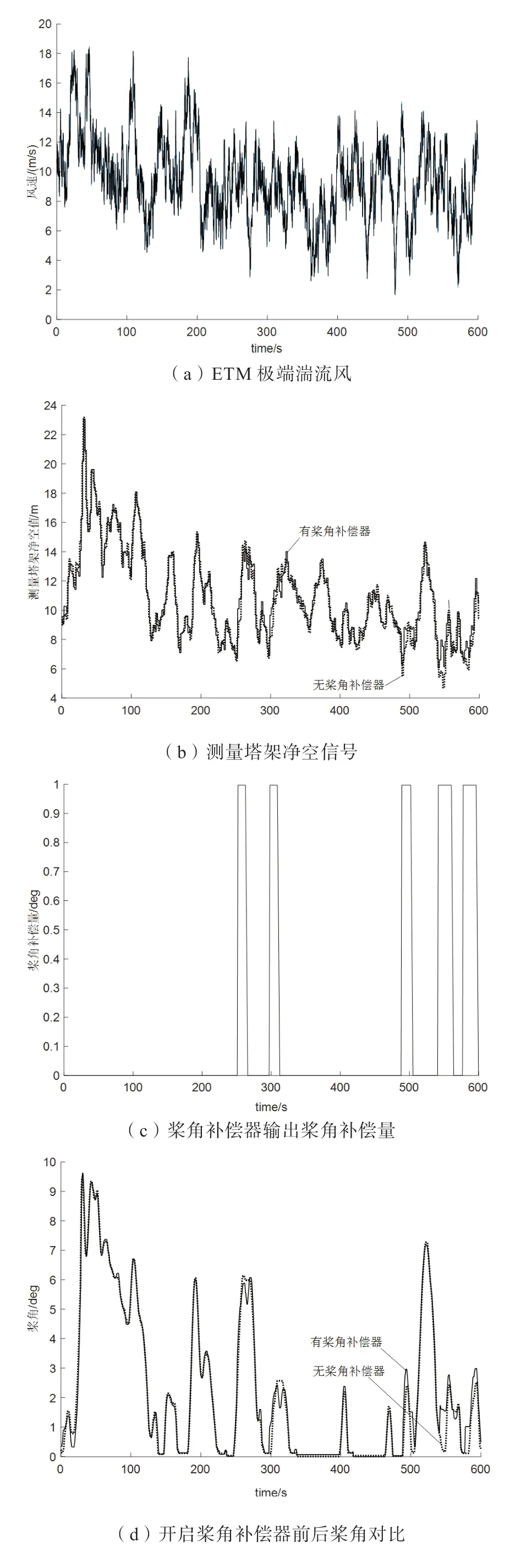
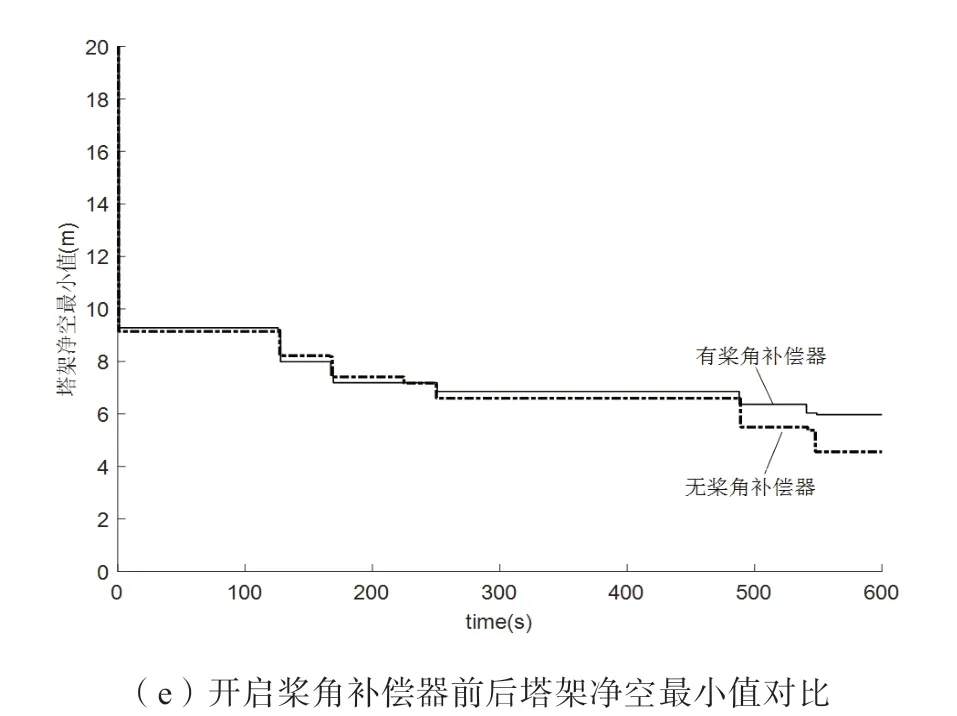
图5 ETM极端湍流风工况下仿真结果
EWS风况的仿真结果如图6所示:6(a)是EWS风况下叶轮面的风速变化时序,极端风剪切来临时刻,上叶轮面的风速快速减小,下叶轮面的风速快速增大,增大了叶片碰撞塔架的风险;6(b)是开启桨角补偿器前后的桨角对比,6(c) 开启桨角补偿器前后的最小净空对比,可以看出,通过桨角补偿,极端风剪切工况下的净空可以提升1m。
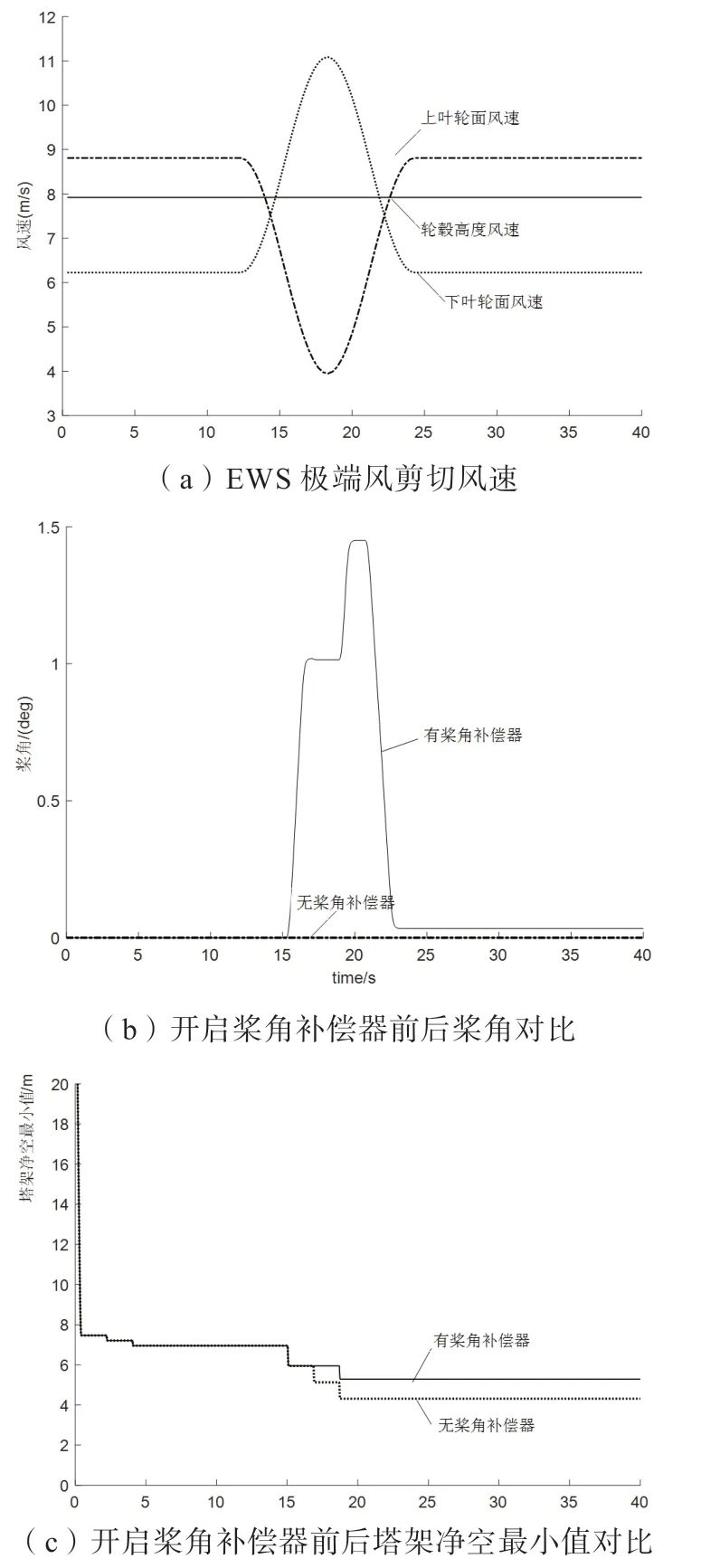
图6 EWS极端风剪切工况下仿真结果
2.2 载荷影响分析
部件疲劳载荷也是大叶轮机组设计中的关键制约因素,因此需要考虑净空优化的方案对机组关键部件疲劳载荷的影响。以上述仿真为例,采用文献[7]中描述的雨流计数算法计算机组20年等效疲劳载荷。图7是开启净空优化前后机组的关键部件叶根、塔底、变桨疲劳载荷对比,可以看出,净空优化方案对机组的疲劳载荷几乎没有影响。
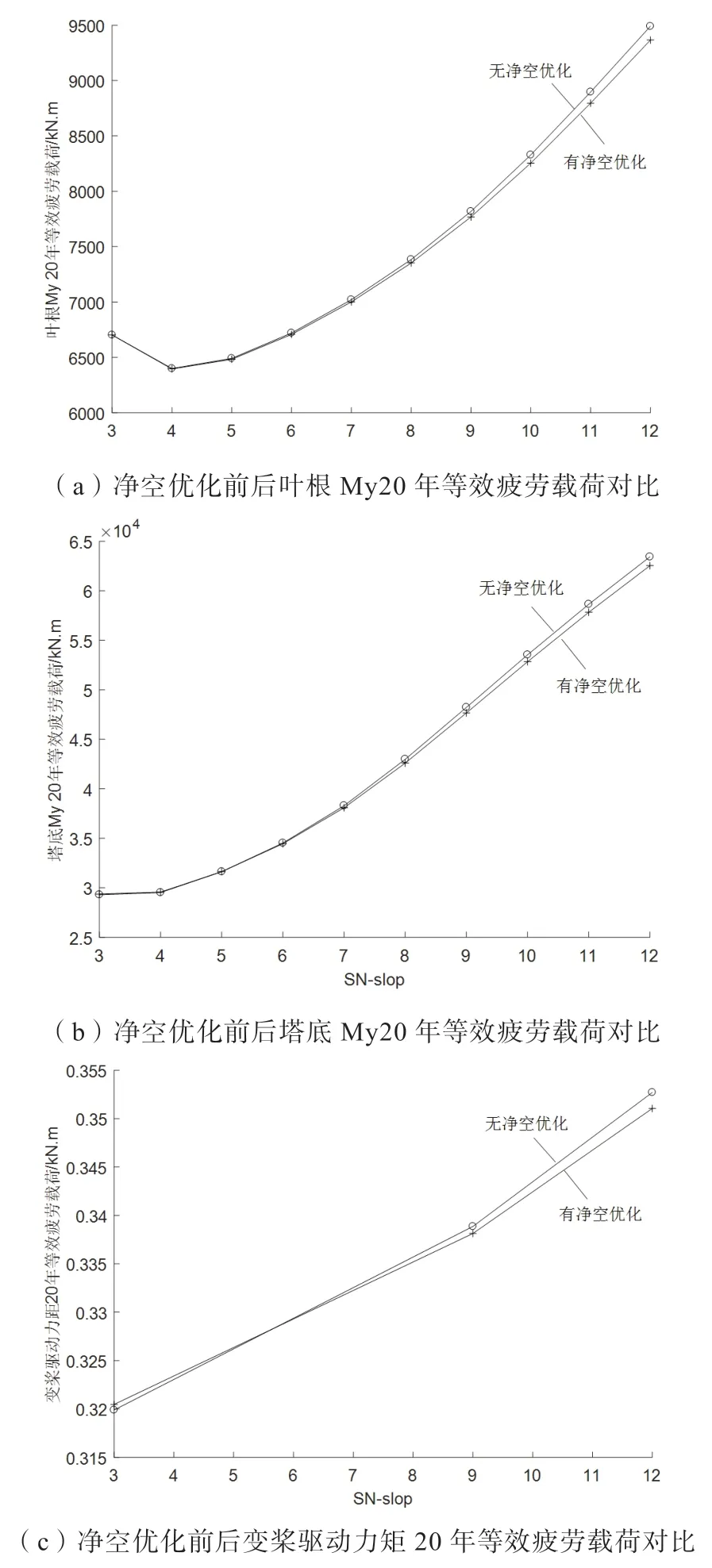
图7 开启净空优化前后机组关键部件疲劳载荷对比
3 样机测试结果
该方案已经在现场小批量应用,相关算法在PLC控制器中实现。图8是在一台MW机组上的测试结果,该机组所处山地地形,风况较复杂。8(a)是测试风速,风速均值7.3m/s,湍流23%;8(b)是测试转速,额定转速是14pm;8(c)是测试塔架净空信号,机组运行在额定转速附近且风速湍流较大,塔架净空波动较大。当塔架净空低于设定保护值时刻,给出桨角补偿量,如8(d);8(e)和8(f)分别是变桨角度和变桨速率,桨角补偿后,变桨角度增大,叶轮面的推力减小,使得在恶劣风况下,叶片形变减小,塔架净空有所提升,保证了机组的安全。
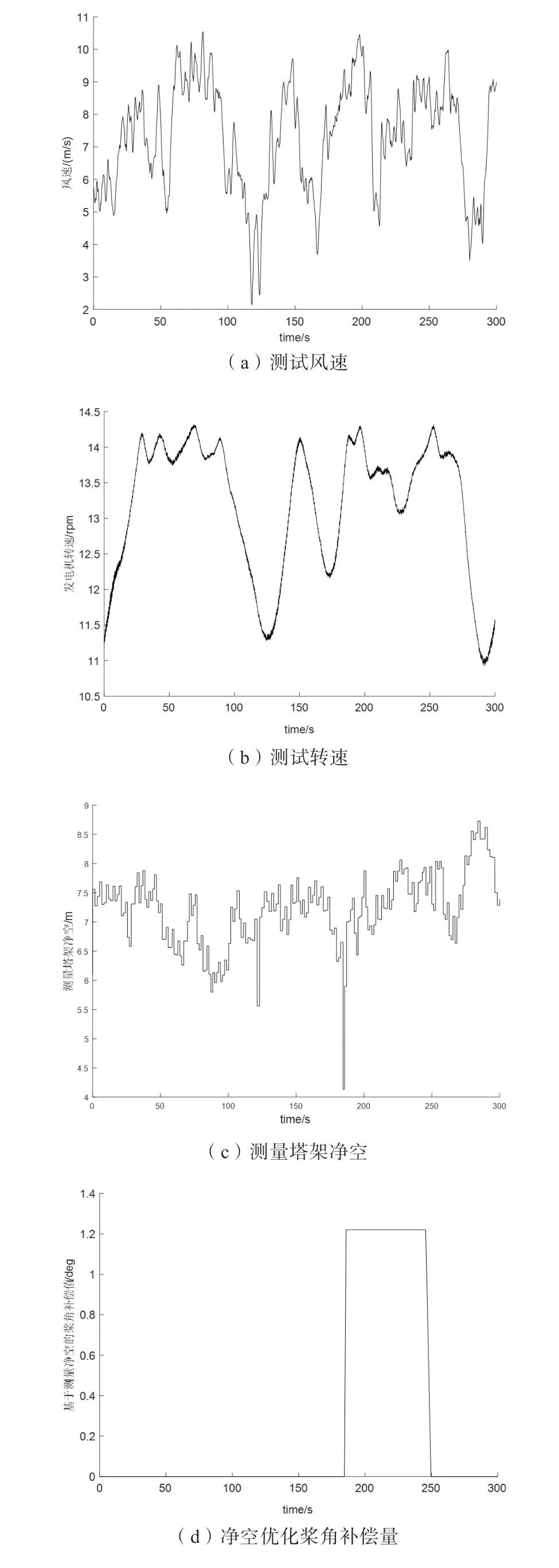
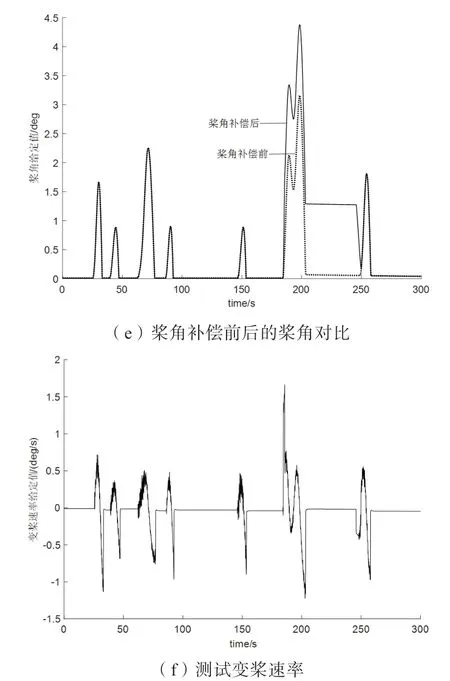
图8 样机测试结果
4 结论
文章介绍了一种风力发电机组净空优化的变桨控制方法,通过对塔架净空的特性分析,设计了基于测量净空的变桨优化控制器,并通过仿真分析和样机测试验证了算法的有效性。该算法可以有效提升塔架净空值,极大降低了极端风况下叶片塔架碰撞的概率,提高了机组的可靠性。同时,评估证明该项技术对机组关键部件的疲劳载荷无影响。该方法在风力发电机的设计优化中有非常重要的作用,通过对塔架净空的保护有助于长柔叶片的开发及应用,不仅可以实现叶片的减重降本,还可以捕获更多的风能,提升发电量,从而提升机组的竞争力。同时,该方法工程化简单,容易推广应用。
风力发电机组配置了塔架净空保护系统以后,叶片开发中净空约束的安全系数在一定程度上可以降低,从而对标准进行修订,这是未来要研究的概率设计方法。
猜你喜欢
上海航天(2022年5期)2022-12-05
交通科技与管理(2022年8期)2022-05-07
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
宝藏(2021年3期)2021-04-20
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
通信电源技术(2016年1期)2016-04-16
石油化工建设(2015年6期)2015-12-01
石油化工建设(2015年6期)2015-12-01