无像控点仿地飞行在低空摄影中的应用
2021-03-08 04:53王站杨铭伟
工程建设与设计 2021年2期
王站,杨铭伟
(1.山西冶金岩土工程勘察有限公司,太原 030000;2.山西华冶勘测工程技术有限公司,太原 030000)
1 项目概况
本研究以某测绘项目为例,该项目整体测区狭长,最大高差约为160m,现场踏勘测区内沟壑纵横,灌木丛生,交通不便,属于山地类型,测区面积约为2.45km2,为保证工期及测绘成果的准确性,选择无像控点仿地飞行模式,采用无人机对该区域进行低空摄影,根据航测结果进行汇总,与之前的实测的带状地形图特征点进行对比,分析数据精度的准确性。
2 无像控点仿地飞行在低空摄影中的应用
2.1 无人机设备的机型选择
低空无人机航空摄影测量是在超低空对地面进行影像拍摄,通过对传统航拍模式进行优化,并且添加遥感功能,这样可以快速将地面情况反馈到地面站中,对数据信息进行转化,形成全新的勘测成果,这种方式具有摄像分辨率较高且作业执行顺畅等优势,而且可以有效降低成本,通常只需要根据实际情况选择合适的无人机型。具有以下优势:一方面是飞行高度低,影像分辨率高,提高内业判读准确性,由于无人机自身质量较轻,作业灵活,易于在特殊环境飞行;另一方面,采用布点方案,将整体航拍区域划分为具体区域,通过对每个区域内部的地域信息进行低空拍摄,最后进行汇总成像,这样可以有效提升匹配精准度,保证仿地飞行航拍的效率。
本次低空摄影工作选择飞马智能航测遥感系统D2000,可以应对项目区域地势狭长且高低落差的情况。为进一步促进结果精准度与稳定性,还要对坐标获取技术进行革新,加强坐标信号传输与基站之间的联系效率。无人机相关运行参数如下:飞马智能航测遥感系统D2000 的续航能力:最长航时74min;对称电机轴距:598mm;空机质量:2.6kg;抗风能力:6 级;定位技术:网络RTK、PPK 及融合解算。D-CAM2000 的相机型号:SONY A6000;传感器尺寸:23.5mm×15.6mm(aps-c);有效像素:约2 430 万;镜头参数:25mm 定焦。
2.2 低空摄影作业流程
在围绕项目区域展开低空摄像时,仿地飞行无人机的无像控点模式在与传统拍摄模式进行对比时,其应用优势主要体现在航线规划设计以及航拍能力等方面,地面站可以根据无人机传输的数据信息对地形地貌数据不断进行规划,也就是航空拍摄始终处于数据调整状态中,这样可以减少后期汇总分析工作的难度[1]。此外,本项目还采用空三建模软件进行辅助成图。因此,最终将低空摄影作业流程确定为数据准备、航线规划、无人机航拍、外业实测以及数据处理等阶段。
3 无像控点仿地飞行在低空摄影中的实施流程
3.1 低空摄影目标
对原有的地形图进行检测,结合实际航测情况做出调整,从而对低空摄影工作的开展制订相应的计划方案,可以在一定程度上提升航测作业的稳定性与准确程度。项目测试由无人机进行仿地飞行,保证3cm 地面分辨率的倾斜模型平面,这样可以使高程拍摄精度满足1∶500 地形图的要求。此外,在围绕无人机的航拍工作开展像控布点时,需要注意:(1)仿地飞行模式以低空飞行航拍为基础,其产生的数据源需要与整体布控方案相契合,这样可以使最终的勘测成果更具准确性,通过对无人机的飞行状态与航拍频率进行调整,可以规避天气造成的不良影响,获取质量较好的原始影像资料。(2)在针对作业区块进行划分时,为进一步提升勘测工作的精准度,不同飞行架次的首航带与尾航带必须保证一定的重叠性,进而提升前后摄像头获取数据的一致性,必要时要根据情况添加像控点,保证不同作业区域具有完善的构网。
3.2 飞行作业准备工作
在开展无人机航测工作前,还要完善前期准备工作,具体内容如下:(1)结合已有的地形图与高程地形图,找出2 张图之间的差异,并且构建5cm 分辨率的DEM 模型,将两端的外部延伸距离调整为30cm,同时还要结合高程系统对全新的地形图进行换算,以此明确航拍工作的行进路线。(2)结合岩土工程勘察要求进行航线规划,还是将DEM 分区作为基础,围绕飞马智能航测遥感系统D2000 的运行特点进行分析,由于该设备为单镜头平台,因此,为保证倾斜角与正射角度的准确性,需要进行多次采集,保证每次采集工作的航线与勘察流程符合相关要求[2]。
3.3 无人机航拍
本次航拍项目为无像控点模式,因此,不需要对航测区域中的像控点位提出要求,要结合无人机航拍的流程步骤进行规划。为提升地面勘察工作效率,本次仿地飞行低空摄像采用2套飞马智能航测遥感系统D2000 无人机进行协同作业,总共耗时11h 完成任务。具体方案为:采用2 台无人机分别对待勘察区域展开航拍,最终2 台无人机共同对区域中间区域进行航拍,并且将所有数据进行汇总分析,保证数据的完整性。
3.4 数据处理与模型生产
在对影像数据进行处理时,将无人机的航拍影像数据导入检测软件中,并且提交空三模型进行综合计算,空三结果合格,则说明无人机低空摄像结果具有较高的准确性。此外,还要对后期提供EPS 平台成图,结合外业调绘数据与原有的地形图进行调整优化,保证最终成图的准确性。
3.5 数据结果精度分析
本次低空摄影主要针对平面位置误差展开分析,例如,中误差、最大误差以及平地限差与山地限差等,地面站根据航空无人机反馈的数据信息进行实时记录,最后与空三图像进行结合,结果显示,空三质量合格,满足项目生产需求,本次无人机仿地飞行低空摄像的勘察结果可以为岩土工程项目提供准确的数据支持,精度分析结果如表1 所示。
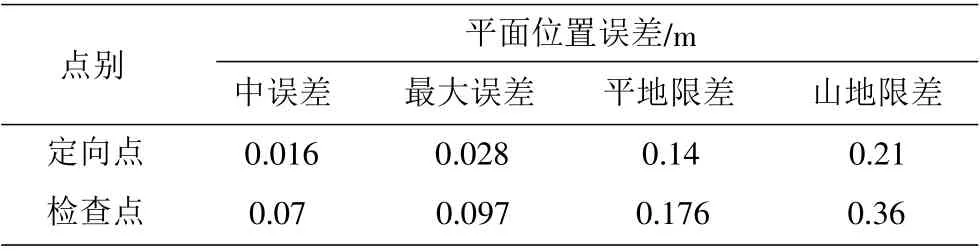
表1 测绘结果精度分析
4 结语
综上所述,采用无像控点仿地飞行对低空目标进行摄影,需要对航测流程、无人机型号以及数据处理等方面进行优化,这样才能保证测绘项目结果的准确性。本研究以实际工程为例,对仿地飞行航测方案展开分析,根据勘察结果可知,这种低空摄影可以为大比例尺地形图数据采集提供更多的选择路线,不仅更具灵活性,而且在作业成本、作业效率以及成果精度等方面均得到了大幅度的提升,可以对测绘工作的顺利开展提供稳固动力。
猜你喜欢
建材发展导向(2021年10期)2021-07-16
时代邮刊·下半月(2020年9期)2020-09-23
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
北京航空航天大学学报(2017年9期)2017-12-18
作文通讯·高中版(2017年6期)2017-07-10
南方文学(2016年3期)2016-06-12
电子制作(2016年21期)2016-05-17
中国房地产业(2016年8期)2016-03-01
兵器知识(2016年2期)2016-01-29