
三维惯性陀螺定位技术在非开挖地下管线高精度探测中的应用研究
2021-03-08 02:16程铭宇陈友良
城市勘测 2021年1期
程铭宇,陈友良
(广州市城市规划勘测设计研究院,广东 广州 510060)
1 引 言
随着城市建设的飞速发展,主要道路下的管网已是十分密布、趋于饱和,对地下管线探测技术提出了极大挑战。传统的管线探测技术大多是基于地球物理勘探的原理,通过一套完整的发射-接收系统,分析地下管线和周围介质的物性差异,以此推断其空间位置和埋设深度。由于地下管线的复杂性和地下介质的多样性,探测精度受到很大的影响,对于一些重要管线的建设和维护带来很大的安全隐患。近年来,三维惯性陀螺定位技术日趋成熟,在地下管线高精度探测中得到了越来广泛的应用。本文将结合比利时REDUCT公司生产的陀螺仪管道定位系统在广东的应用实例,简要介绍三维惯性陀螺定位技术的原理和工作方法,并探讨该技术的应用优势。
2 三维惯性陀螺定位技术的原理
陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,陀螺仪在角动量守恒原则下,具有两大特性——定轴性和进动性,在航天航空的惯性导航系统中有广泛的应用。
受惯性导航和示踪探头法探测地下管线的启发,综合运用陀螺仪和惯性定位技术,三维惯性陀螺定位仪应运而生,并在管线探测中得到了有效的应用。三维惯性陀螺定位仪主要有陀螺仪组件和加速度计组件组成,如图1所示,分别测量定位仪的相对惯性空间的3个转角速度和3个线加速度沿定位仪坐标系的分量,经过坐标变换,把加速度信息转化为沿导航坐标系的加速度,并运算出定位仪的位置、速度、航向和水平姿态,如图2所示。
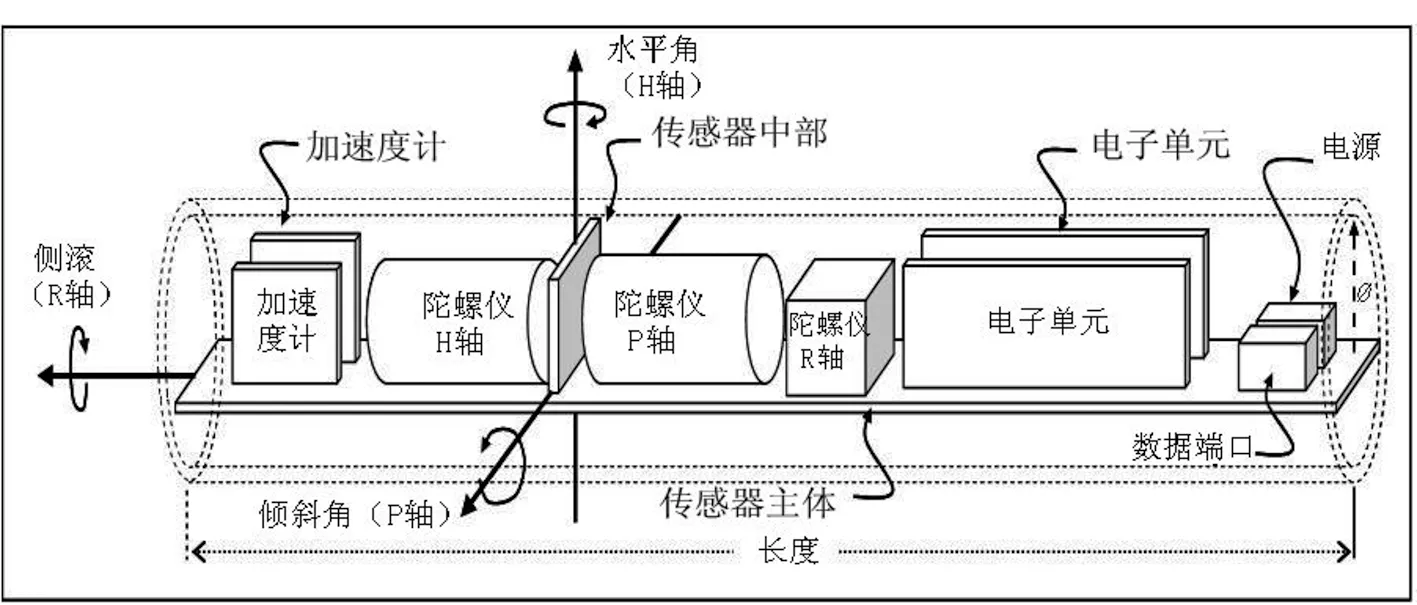
图1 惯性陀螺定位仪结构图
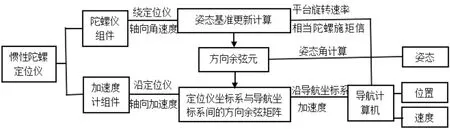
图2 惯性陀螺定位仪工作原理示意图
3 REDUCT陀螺仪管道定位系统简介
国内学者和科研机构在2005年左右开始三维惯性陀螺定位技术的研究,在产品化和商业应用方面有了一定的进展。目前,在地下管线探测领域常用的是比利时REDUCT公司生产的陀螺仪管道定位系统,它由惯性定位仪(OMU)和轮组系统组成,如图3所示,并配备专用的计算机和数据处理软件。
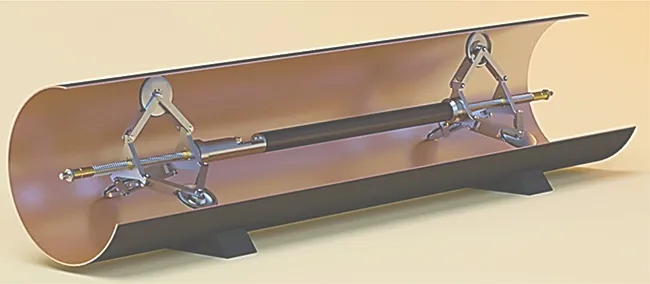
图3 REDUCT陀螺仪管道定位测绘系统
REDUCT管道定位测绘系统操作简便,具体工作步骤如下:
(1)起讫点测量:打开管线工作井,测量管段起讫点的坐标,量取管道内外径;
(2)管道疏通:使用穿管器将牵引绳施放在管道内,将管道牛连接在牵引绳上,在管道内来回拖动,以确定仪器可以在管道内正常行走;
(3)陀螺定位测量:将陀螺仪连接牵引绳上在管道内拖动;
(4)坐标解算:将测量数据导入专用计算机,输入管道起讫点坐标等测量参数进行坐标解算。
4 精度实验验证
为了验证REDUCT陀螺仪管道定位系统的测量精度,搭建专用的测试管道,管道采用内径 90 mm的PVC管道,长度 66 m,如图4所示。

图4 精度实验测试场地
采用全站仪取轴线方向均匀取点测量,与REDUCT管道定位测绘系统测得的数据进行拟合对比,对比结果如图5、图6所示。经分析精度,最大水平偏差 0.06 m,最大垂直偏差 0.04 m,精度符合要求。

图5 管线三维形态图

图6 管道平面图
5 应用实例
为获取佛山市110 kV东牵线、平林线等输电线路定向钻施工管线的准确空间位置坐标,采用REDUCT陀螺仪管道定位系统,共测量管线20段,总计长度约 3 686 m,经4次重复测量、部分检测点的钎探、开挖、综合物探验证,探测精度优良,最终形成综合探测报告、地下管线平面图、纵断面图、三维效果图、管线点成果表等一系列完整的管线高精度定位资料,为管线的建设和维护提供了保障。
以丹桂路口(金沙邮局旁)电力管线段为例,该段管线为管径 200 mm的塑料管,全长约 170 m,横跨丹桂路和立交桥。采用REDUCT陀螺仪管道定位系统进行测量,最终生成三维效果图、平面位置关系图、纵断面图,并以 1 m为间隔生成管线点成果表,如图7、图8所示。

图7 现场作业照片

图8 丹桂路口(金沙邮局旁)管线测量三维效果图、平面图、断面图及部分成果表
根据测量结果,本段管线埋深最大为 10.17 m,用常规的管线探测仪很难准确探测出管线的平面位置和埋深。为了验证惯性陀螺仪定位的精度,选取6个埋深在 4 m内的管线点用常规的RD8000管线探测仪进行了对比分析(表4),结果显示平面位置偏差最大为 0.25 m,埋深最大偏差在 0.54 m。
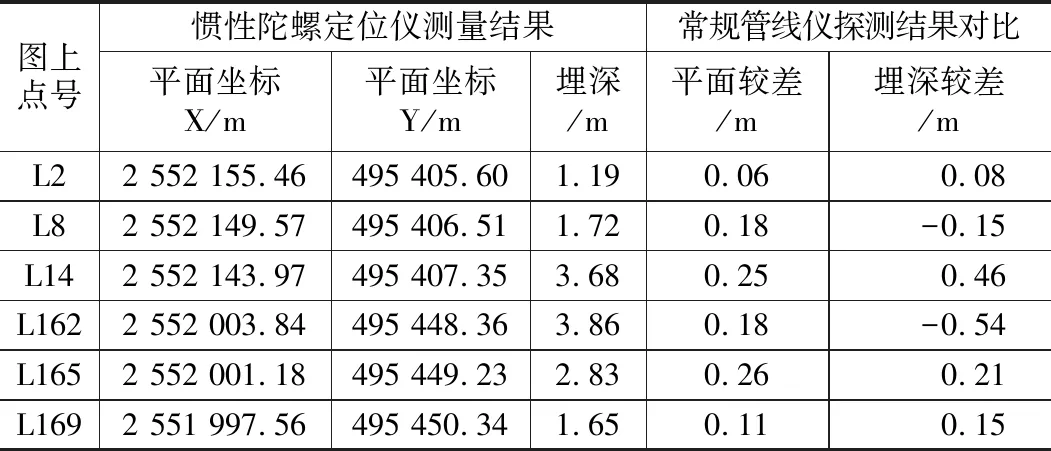
惯性陀螺定位仪与常规管线仪探测结果对比分析 表1
6 结 论
三维惯性陀螺定位技术在非开挖地下管线高精度探测中取得了良好的效果,结合实际操作,得出如下结论:
三维惯性陀螺定位技术摒弃了传统探测技术依赖于目标体物性差异的限制,具有精度高、性能稳定、受地下介质和外界条件干扰较小的特点,为地下管线精确定位提供了有效的解决方案。
由于陀螺定位仪需要在管道内拖动,要确保管道畅通,较适宜新建管线的高精度探测,对于已投入使用的管线必须要有预留的空管。
目前常见的轮组以 90 mm~ 500 mm为主,对于较大管径的管线探测需要定制专用的轮组。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
北京航空航天大学学报(2021年9期)2021-11-02
价值工程(2018年28期)2018-09-20
百科探秘·航空航天(2017年9期)2017-12-31
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
消费导刊(2017年21期)2017-01-28
山东工业技术(2016年15期)2016-12-01
艺术科技(2016年9期)2016-11-18
系统工程与电子技术(2016年7期)2016-08-21
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
