
基于高精度导航地图的自动驾驶辅助决策方法
2021-03-08 02:16黄志向煜
城市勘测 2021年1期
黄志,向煜
(1.重庆数字城市科技有限公司,重庆 401121; 2.重庆市移动测量工程技术研究中心,重庆 401121)
1 引 言
自动驾驶技术是在人工智能、视觉计算、模式识别等技术的基础上快速发展起来的一项前沿技术,受到社会广泛关注。目前自动驾驶主流的技术路线是在车上安装激光雷达、相机、惯导等传感器,通过实时感知外部环境,规划决策并控制和执行车辆自动化操作[1]。随着自动驾驶层级逐渐演进,车辆上的传感器会越来越多,Lv5级别的自动驾驶传感器甚至会达到32个[2]。与此同时,随着传感器的数量增加,AI电脑需要实时处理的数据将会越来越多,这将对电脑的处理能力、算法的优劣提出挑战。同时外部环境瞬息万变,只依赖于传感器进行环境感知,自动驾驶感知识别可靠性不高[3]。
国际自动机工程师学会(SAE)的J3016标准将自动驾驶级别划分为6级,其中要实现Lv3(有条件自动化)及以上级别,高精度导航地图必不可少[4,5]。相比于传统地图,高精度导航地图精度要求优于 1 m,相对精度达到 10 cm~20 cm,地图内容将达到车道级别[6],同时高精度导航地图也会采集道路标识标牌,建立道路和车道拓扑关联,能表达更加详尽的交通要素信息[7,8]。目前高精度导航地图运用于自动驾驶方面的研究有很多,其中文献[9]提出使用路径跟踪算法来保持车辆沿规划的路径行驶,该方法的实现基于已规划的线路,但预先规划路径只适用于测试场地,在环境不断变化的开发道路该方法有局限性,同时该方法未考虑车辆在车道级别的精确控制。文献[10]提出使用边缘计算技术采用众包方式实时构建高精度地图并进行车辆定位,该方法依赖于AI芯片的研发,实现大量矢量数据的自动融合和要素的拓扑自动建构难度较大。
针对以上问题,本文提出了使用移动测量系统预先构建高精度导航地图,基于车辆上的惯导及实时差分定位数据计算车辆范围。使用空间查询,按照一定频率实时查询车辆范围内的地图要素。根据查询到的标识标牌信息辅助车辆传感器决策,根据查询到的车道标线精确控制车辆的行驶线路,以此来提高自动驾驶可靠性。
2 高精度导航地图的构建
高精度导航地图包含车道级别的道路网,交通标识标牌,信号灯,桥梁隧道等众多交通要素,车道与车道之间,道路与道路之间构建了拓扑关系,要素众多且要素之间关系复杂。移动测量系统集成了激光雷达、全景相机、惯性测量单元、GNSS等传感器,能够快速采集道路上及周边详尽的高精度点云及影像数据,对高精度导航地图的数据来源提供了高效的解决方案[11]。其生产流程如图1所示。

图1 高精度导航地图生产流程
3 辅助决策方法
3.1 车辆范围计算
车辆上安装的GNSS用于采集车辆位置数据,惯性测量单元用于测量车辆的姿态(航向角、俯仰角、侧滚角),设任意时刻实时差分位置为P(x,y,z),车辆的航向角为θ,GNSS相对车辆前后左右四边界标定距离分别为a、b、c、d。则四角的坐标为:
(1)
其中(xi,yi)|i∈{1,2,3,}分别为左前角,右前角,左后角,右后角坐标,θ∈[0,2π]。通过计算车辆四角点坐标,即求得了车辆在高精度导航地图中的绝对位置范围,如图2所示。

图2 车辆四角坐标示意图
3.2 要素空间查询
高精度导航地图数据精度高,其表达的与交通相关的要素多,数据量大;同时因自动驾驶实时性要求,因此必须提高要素查询效率。本文采用改进的四叉树查询方法,查询流程如图3所示。

图3 要素查询流程图
首先获取车辆实时位置,通过查询客户端查询缓冲区范围内的交通要素,然后将查询结果返回给客户端,最后客户端将返回结果进行分类,包括交通标线、交通标识标牌等交通要素。
3.3 空间分析辅助决策
道路外部环境错综复杂,使用高精度导航地图辅助查询能有效减小计算机计算压力,将更多计算资源用于除道路情况外的动态环境感知,如车辆、行人、障碍物等,提高传感器识别准确率和增加决策可靠度。辅助决策流程如图4所示。

图4 辅助决策流程
车辆范围与交通标线进行碰撞检测,将检测结果返回给决策系统,决策系统根据标线类型(虚线、实线等)、车辆动态环境感知结果综合分析决策,决定车辆是进行变道还是纠正方向。其伪代码如图5所示。

图5 线路纠偏伪代码

图6 标识标牌辅助识别伪代码
根据查询到的标志标牌等要素位置,使用传感器有目的地进行识别分析提取,进而进行决策。其伪代码如图6所示。
4 实验与结果分析
本实验在中国汽车工程研究院有限公司(重庆礼嘉)测试场地进行,实验场高精度导航地图数据采用重庆数字城市科技有限公司与重庆市勘测院联合研制的吉信移动测量系统(DCQ-MMS-X3)采集制作而成,部分数据如图7所示。数据查询频率 100 Hz。
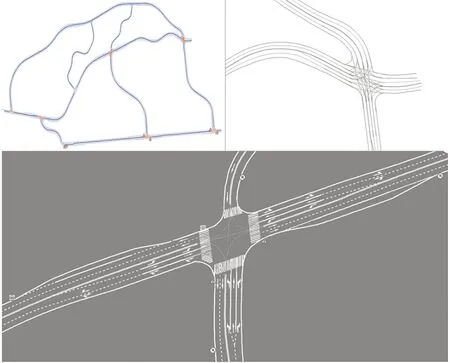
图7 高精度导航地图数据
车辆在左侧道路开始行驶,实验过程中,在实验场地中人工设置障碍物模拟真实道路环境,通过对比无高精度导航地图的环境下与有高精度导航地图环境下自动驾驶车的行为来说明可靠性。结果如表1所示。
由表1可知,使用高精度导航地图辅助决策能够提高动态环境下自动驾驶车的适应性、可靠度。
车辆在不同的车道上行驶,使用同一套训练集,对车道上标识、标牌的识别速度和准确率(包括类型和语义)进行统计,如表2所示:
由表2可看出,使用高精度导航地图能精确提供标识标牌位置,减少检索范围,对标识、标牌的识别效率和准确率更高。
5 结 语
本文提出一种基于高精度导航地图的自动驾驶辅助决策方法。利用移动测量系统采集道路网数据,制作高精度导航地图;使用测试车惯导和实时差分定位数据计算车辆范围;使用空间查询,实时查询车辆缓冲区范围内的地图要素;利用碰撞检测及时纠正车辆行驶方向以及提供辅助分析决策信息。实验结果表明该方法能够有效减小计算机计算压力,提高传感器识别准确率和效率以及增加决策可靠度。
猜你喜欢
卫星应用(2021年11期)2022-01-19
小读者(2021年20期)2021-11-24
小读者·爱读写(2021年10期)2021-11-05
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
现代企业文化·综合版(2016年11期)2016-12-21
光学精密工程(2016年3期)2016-11-07
