无人机倾斜摄影技术在公路勘察设计中的应用
2021-03-06 06:32李红梅
地理空间信息 2021年2期
李红梅,孙 炜,李 松
(1.中国公路工程咨询集团有限公司(武汉)勘察分公司,湖北 武汉 430000)
无人机遥感系统具有成本低、速度快、易操作等优势,已广泛应用于环境监测、生态农业、灾害应急与三维重建等领域中[1-3]。相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实地反映地物的实际情况,极大地弥补了基于正射影像应用的不足。三维模型具有真实、直观、可量测、精度高的优点,应用于公路的勘察设计中,可以高效、直观地参考周边的地形和地质情况,再结合外业测量人员的实际测量工作,进行勘察设计工作。
1 倾斜摄影技术
1.1 倾斜摄影技术简介
倾斜摄影是指相机主光轴与地面的垂轴存在一定的倾斜角时进行的航拍摄影[4],如图1 所示。
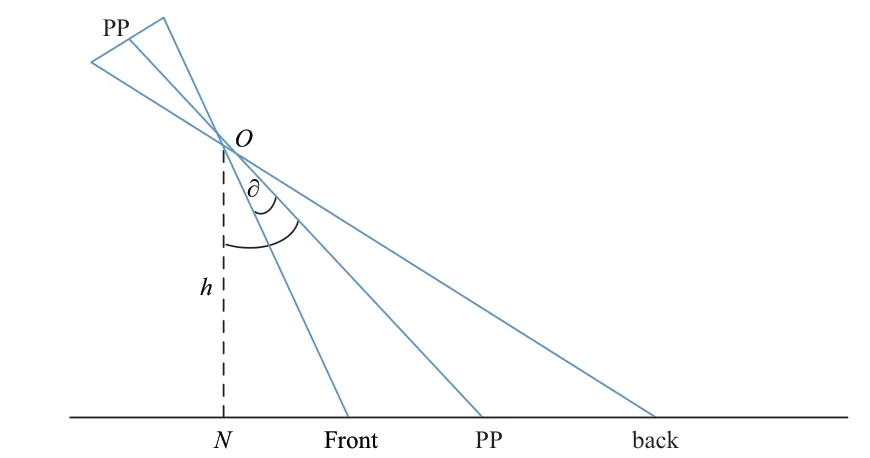
图1 无人机倾斜摄影摄影光线原理图
按照光轴倾斜的分类可以分为①垂直影像:t <5°;②轻度倾斜影像:5°<t <30°;③高度倾斜影像:t>30°;④水平摄影影像:t≈90°;
1.2 技术突破
传统摄影测量采用下视摄影,这种摄影方式可以很好地观测到地表和被摄物体顶部的特征,整幅影像采集时摄影比例尺大体相同,影像上各点分辨率相对平均,如图2 所示。
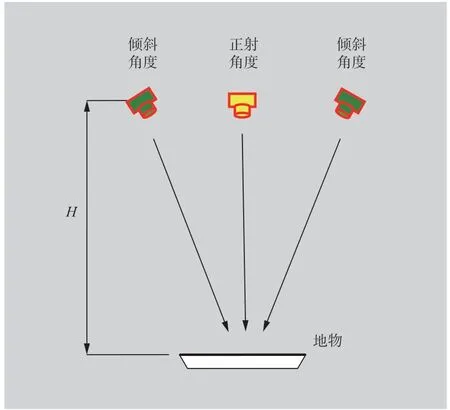
图2 无人机倾斜摄影摄影相机拍摄示意图
倾斜摄影测量由于采集时影像与地面存在一定的夹角,可以观测到更多的被测物的侧面信息,但是也会受到被摄物体更多的遮挡,影像像幅上不同点的象元分辨率也不相同。
因此我们必须采用多基线多视角的交相摄影方式进行数据采集,来满足三维建模时各个不同角度的构型需求。
1.3 倾斜摄影的特点
倾斜摄影技术相比与传统航测的优势:
1)反映地物周边真实情况:相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实地反映地物的实际情况,极大地弥补了基于正射影像应用的不足。
2)倾斜摄影测量可以便捷地对被测物进行几何量测。通过配套软件的应用,可直接基于成果模型进行量测,扩展了测量成果的应用纬度。
3)建筑物侧面纹理可采集。针对各种三维数字城市应用,利用航空摄影大规模成图的特点,加上从倾斜影像批量提取及贴纹理的方式,能够有效降低城市三维建模成本。
4)易于发布。倾斜影像的数据格式可采用成熟的技术快速进行网络发布,实现共享应用。
2 无人机三维建模关键技术
2.1 倾斜摄影影像的自动空三
倾斜摄影测量的自动空三方式大量利用了现在最先进的计算机视觉还原技术,将计算机视觉技术与传统航测技术进行结合,充分利用计算机视觉技术对于三维现实还原容易的特点,结合传统航测技术中高精度定向方法,使三维建模成果既美观也具有可量测应用性。其空三过程主要由:①匹配连接点;②构建自由网;③区域网平差,几个步骤组成[5],如图3所示。
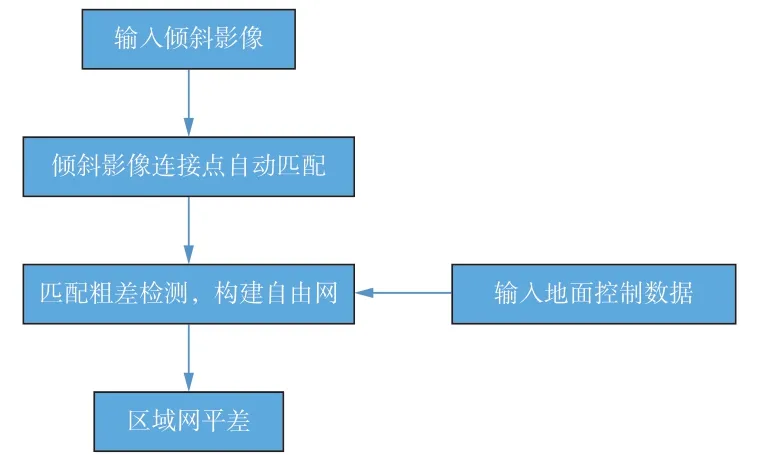
图3 无人机倾斜摄影摄影相机光线示意图
2.2 倾斜影像的密集匹配
基于SHIFT 算子的特征点匹配,将计算待匹配的两特征点间的欧氏距离作为匹配测度[6]。
构建尺度空间:①高斯卷积核,图像金字塔;②检测尺度空间极值点:在DOG 尺度空间本层以及上下两层的26 个邻域中是最大或最小值,并去除低对比度的关键点和不稳定的边缘响应点;③计算关键点主方向;④生成128 维的关键点描述。
2.3 密集点粗差检测与自由网的构建
1)采用RANSAC(随机采样一致性)方法,基于5 点法相对定向模型(5 点共面条件),进行粗差检测[7]。
2)基于双模型的粗差点检测,对于双模型的三度重叠点,采用空间前方交汇计算像点残差,剔除残差较大的粗差点。
3)基于双模型的相对定向可靠性检测,不断选择相互间具有足够连接点的三张影像,依次在影像间两两进行相对定向,计算相对定向的线元素和旋转矩阵。如果相对定向正确,3 个线元素向量应共面,3 个旋转矩阵依次相乘应为单位阵。
4)输出自由网结果。
其总体流程如图4 所示。
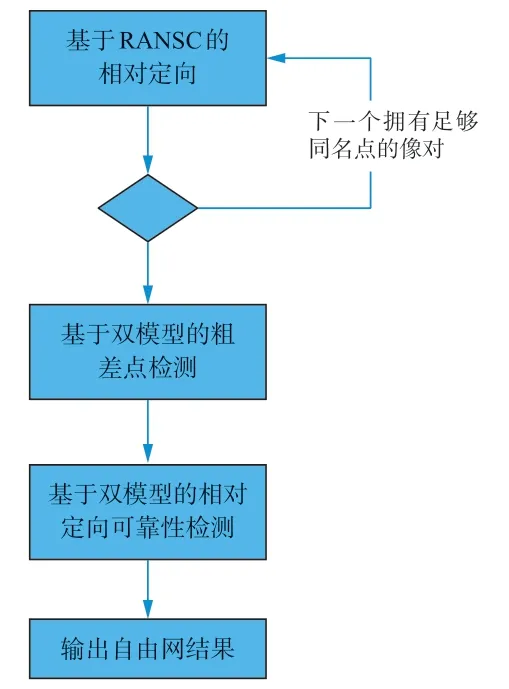
图4 无人机倾斜摄影自由网平差过程示意图
3 倾斜摄影无人机三维建模及修模作业流程
3.1 外业流程
1)确认飞行区域:获取被测区域的KML 文件或者测区的四角坐标,在谷歌地图上将需要测量的区域勾绘出来;
2)分析测区情况:通过谷歌地图或者奥维互动地图分析测区基本情况,满足1∶500 免象控要高差不可太大,高差/航高≤0.3,也就是说如果设计航高在250 m 那么的地形最高点与最低点高差应在75 m 以内。
3)飞行航线计划:①飞行航线规划应按照风向进行,为了在飞行中获得更好的飞行姿态,需按照顶风顺风方向设计航线。②假设飞行航线按照南北向飞行,航线飞行范围东西向应超出测区范围一条航线,南北向应超出测区范围大约三张影像的距离。
4)相机设置:①执行航拍任务时,相机应设置为S(快门优先)模式,快门速度设置应大于1/1 000 s,如果光照环境特别好的时候可以设置为1/1 250 s 或者1/1 600 s。②ISO 值应根据现场光照情况进行设置,在满足曝光的情况下ISO 值越小画面杂讯越低,一般晴天的正午建议设置ISO200,阴天的正午设置ISO400。夏季的17:00 后可以设置ISO1000,夏季阴天的15:30 后设置ISO800,晴天的早上9:30 左右设置ISO320。③检查&关闭相机内的AF 选项;关闭相机的HDR 打开DRO 功能;每次飞行前请格式化清空SD 卡确保相机拥有足够的空间。④飞前相机检查时,注意取下相机镜头盖。
5)像控点布设:①像控点靶标应采用方形靶标;②像控点靶标边长尺寸应≥1 m;③地物特征象控应选取在影像上可见的特征地物,地物选取时应选取地物明显的直角或者钝角测量,不宜选取锐角作为特征像控,地物点不可选用房角、电线杆等具有较大高差的地物进行测量,宜选用井盖、道路班线等地物特征。④像控点需以成果目标坐标系为基准进行测量,分布方式在测区内均布即可,勿靠近航飞区边缘。⑤像控点的数量无论何种测区均不可以少于5 个,取测区四角与中心进行分布,如有其他需求,视测区情况适当增加。⑥像控点量测应采用GPS 多点平滑采集,不得采用单点采集,且平滑采集精度δ小于等于0.006 m。
3.2 内业倾斜数据三维建模及修饰
采用三维建模软件半自动对测区进行三维建模工程,将得到的数据成果的OSGB 和OBJ 成果,以及畸变影像和空三成果导入模型修饰软件进行模型修饰工作。
内业模型修饰直接对照原始影像勾勒交互式建模,突破传统立体像对作业方法,无需佩戴立体眼镜,自动检索多角度影像,可在任意表面实现推入、拉出等布尔运算进行结构物的快速操作,并达到测图级精度成果,测图与建模同步完成,二、三维矢量完全对应便于后期分析应用。
整个倾斜摄影建模与测图和模型修饰按照上述流程:
1)航拍获取垂直和倾斜影像通过自由网平差和带控制点的绝对定向,进行航空影像的定位定姿。
2)通过航空影像对街景影像进行定向处理。
3)测图阶段主要利用双视或立体模式,在垂直航空影像上进行空间点的坐标获取,因为建模阶段可以以角点为依据,所以只需要进行部分关键角点的测量。
4)建模阶段,利用DP Modeler 软件在多视影像背景下,快速进行模型构建。
5)勾勒建筑体几何细节:空三成果与影像数据集成Dp-Modeler 平台,通过自动检索多角度影像,从多角度精细勾勒三维模型建筑细节,实现测图与建模同步完成,多个视口联动保证了平面和高程位置的高精度。
6)纹理自动映射:通过摄影测量算法,实现模型贴图自动从影像中采集,一键完成模型贴图,无需调整UV。
4 倾斜摄影无人机三维建模成果
倾斜摄影通过不同角度的拍摄,可以获取被摄物体的各个侧面的纹理信息,从而获得多种数据,数字正射影像,数字高程模型,数字表面模型,数字线化图,三维点云模型以及真三维模型,如图5、6 所示。

图5 倾斜摄影原始影像
图6 三维模型成果
5 结 语
本文针对无人机倾斜摄影技术进行了详细的介绍,包括无人机倾斜摄影的平差算法、匹配方式及可以生成的成果,为公路勘察设计提供参考。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中国铁道科学(2019年5期)2019-10-19
浙江工业大学学报(社会科学版)(2019年2期)2019-07-08
测绘通报(2018年10期)2018-11-02
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
石油化工建设(2017年5期)2018-01-26
照明工程学报(2017年6期)2018-01-10