
半主动空气悬架的非线性特性及控制算法研究
2021-03-05 10:00:42元艳玲樊祺超秦维新
机械设计与制造 2021年2期
元艳玲,樊祺超,范 英,秦维新
(太原科技大学交通与物流学院,山西 太原 030024)
1 引言
半主动空气悬架相比传统悬架,其固有频率低,频域变化范围小,车辆行驶过程中车身高度保持不变,其刚度变化呈“S”型,非线性特性表现明显,可以有效的降低车轮动载荷[1-3]。传统空气悬架,减震器阻尼不可调,使得车辆平顺性和操稳性提升有限,使用阻尼可调减震器可以改善这一困境。空气悬架刚度呈非线性,采用更有效合理的控制算法成为广大学者研究的重点[4-5]。2005年陈燕虹设计了模糊与神经网络控制器,期望改善重载车辆对路面的破坏。2014 年张一飞等设计了分数阶滑膜控制器,取得了良好的效果。2015 年郑明军等设计了滑膜切换面函数和滑膜控制器,明显改善空气悬架系统的隔振性能[6]。2016 年康耀东等设计多级可调阻尼天棚控制器,改善了道路友好性。传统滑膜控制器以理想天棚为参考模型,跟踪结果使得轮胎动载荷变差,操纵稳定性也达不到期望[7]。
为此,拟在分析膜式空气弹簧刚度特性的基础上,建立阻尼可调式空气悬架的动力学模型,并以混合天地棚控制器为参考模型设计滑膜控制器,以期进一步改善车辆平顺性和操纵稳定性。
2 半主动空气悬架系统动力学模型
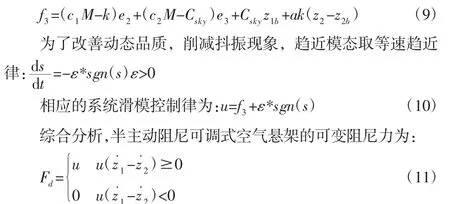
2.1 空气弹簧垂直刚度特性
膜式空气弹簧的弹力来源于气囊内的气体对膜壁的压力[8]。任意时刻气囊内的绝对气压P,有效受力面积A 和标准大气压Pa决定此时空气弹簧的弹力。模型受力示意图,如图1 所示。
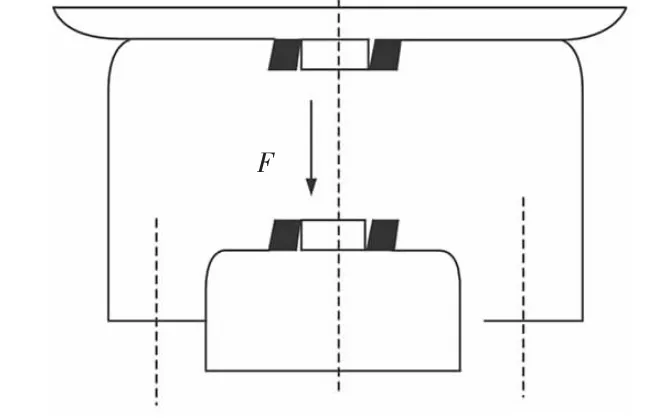
图1 膜式空气弹簧受力模型Fig.1 The Force Model of Diaphragm Type Air Spring
此时由压强计算公式可得:

式中:Pe—空气弹簧有效气压(Pe=P-Pa);A—有效受力面积。
假定瞬态为等温过程则:

式中:Pe0—空气弹簧初始有效气压;Pe—空气弹簧有效气压;Pa—标准大气压;V0—空气弹簧初始体积;Vn—空气弹簧任一时刻体积;n—热力学系数。
又知V=V0-Axh,
式中:A—有效受力面积;xh—空气弹簧形变量。
可得空气弹簧的弹力:

对式(3)求导可以得到空气弹簧垂直刚度(膜式空气弹簧有效受力面积几乎无变化):

悬架系统中理想弹簧需要呈反“S”形,在弹簧拉伸与压缩时刚度随之增大[9]。空气弹簧刚度随气囊内气压变化而变化,可以将其特性曲线设计成反“S”形,如图2 所示。当弹簧形变量较大时,空气弹簧刚度增长明显,这种非线性刚度满足车辆正常行驶时转弯、加速和制动等行驶工况要求,有利于改善行驶安全性。

图2 金属弹簧与空气弹簧动特性比较Fig.2 Comparison of the Dynamic Characteristics of Metal Spring and Air Suspension
2.2 半主动空气悬架数学模型
传统空气悬架减震器阻尼不可调,对车辆平顺性性能提升有限[10],建立阻尼可调[11]的半主动空气悬架,如图3 所示。由牛顿第二定律知,阻尼可调半主动空气悬架的运动微分方程为:

式中:M—簧载质量;m—非簧载质量;k—空气弹簧垂直刚度;kt—轮胎刚度;f—可变阻尼力;q—随机路面激励;z1,z2—车身垂直位移,轮胎垂直位移。
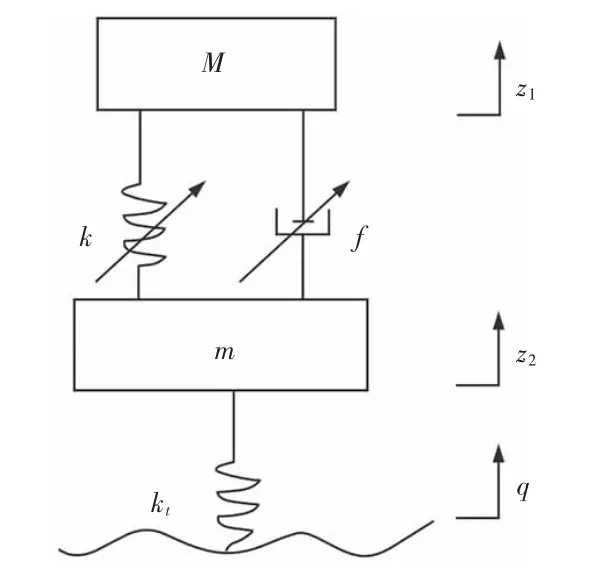
图3 阻尼可调半主动空气悬架1/4 车模型Fig.3 1/4 Damped Adjustable Semi-Active Air Suspension Model

3 半主动空气悬架滑膜控制器设计
传统控制算法针对的是线性系统或者非线性较弱的系统,而空气弹簧的刚度具有较强的非线性特性,传统控制理论控制算法业已不能满足需求[12]。对于具有较强非线性的被控系统,模糊PID 控制有较好的控制效果,但效果不够理想,稳定性差。滑模变结构控制具有较强的鲁棒性,对非线性系统有很强的适应性。
3.1 参考模型
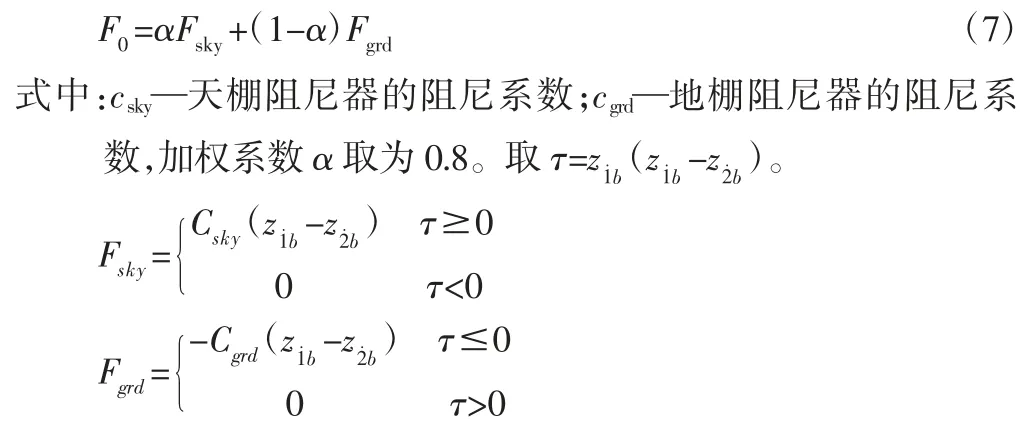
理想天棚控制由于车轮没有阻尼力,轮胎动载荷变大,其贴地性变差,车辆的操稳性也会变差。而理想的地棚控制悬架模型则是以牺牲舒适性为代价来降低轮胎动载荷,改善其接地性,提高车辆操纵稳定性[12]。理想的混合天地棚阻尼控制系统能兼顾舒适性和行驶稳定性,在此选取其为参考模型,设计滑模控制器,运用广义误差方程控制滑动模态,确定切换面的参数,选择等速趋近律削减抖振现象并推导等效控制力有效跟踪参考模型,如图4所示。

图4 混合天棚地棚参考控制模型Fig.4 Reference Mixed Sky-Hook Model
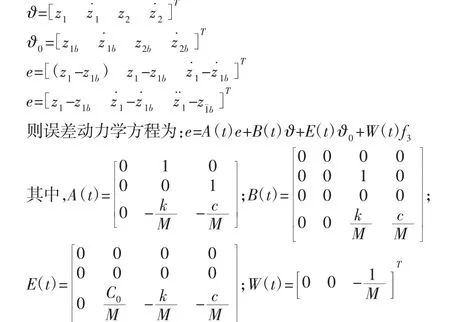
混合天地棚参考模型的动力学方程为:

式中:M0—簧载质量;m0—非簧载质量;k0—减振弹簧刚度;kt0—轮胎刚度;q—随机路面激励;z1b,z2b—车身垂直位移,轮胎垂直位移;F0—混合阻尼力。
混合阻尼力:
3.2 误差动力学模型
基于理想的天地棚混合参考模型的滑模变结构控制器设计的主要问题是以理想的阻尼控制系统作为参考模型,在实际被控悬架与参考模型系统之间建立误差动力学系统,并设计相应的切换函数和变结构控制律,使系统状态轨迹在有限时间内到达所设计的切换面,实现系统滑动模态运动和渐近稳定性。
定义实际悬架与参考悬架的位移误差积分、位移误差以及速度误差为广义跟踪误差矢量e。取变量:
3.3 切换面的设计
控制对象为单输入系统的可变阻尼力,故其切换面可表示为:s=ce=c1e1+c2e2+c3e3
滑动模态决定系统的动态品质,运动微分方程:

由上式的特征多项式D(λ)=λ2+c2λ+c1,可求得c2、c1的值。系统稳定运行时处于欠阻尼状态(0<ξ<1),取σ≤15%,tp≤0.7,故阻尼系数ξ=0.52,wn=5.255,则c=[27.6146 5.4652 1]T。
当s=c1e1+c2e2+c3e3=0,s˙=c1e˙1+c2e˙2+c3e˙3=0 时,系统等效控制力为:
4 仿真计算与分析
为验证滑膜控半主动空气悬架的实际作用效果,选取某商用车为研究对象,悬架参数,如表1 所示。

表1 1/4 阻尼可调半主动空气悬架结构参数Tab.1 Structural Parameters of 1/4 Damped Adjustable Semi-Active Air Suspension
参照《GB/T4970-2009 汽车平顺性试验方法》,选取B 级路面作为随机路面输入。选取参数:参考空间频率n0=0.1m-1,路面不平度系数为Gq(t)(n0)=64×10-6m2/m-1,f0=0.06Hz,车辆以60km/h 的速度行驶。利用Matlab/Simulink 模块建模生成上述条件下的路面输入信号,如图5 所示。并连接已建立的滑膜控制1/4 半主动模型进行仿真计算。
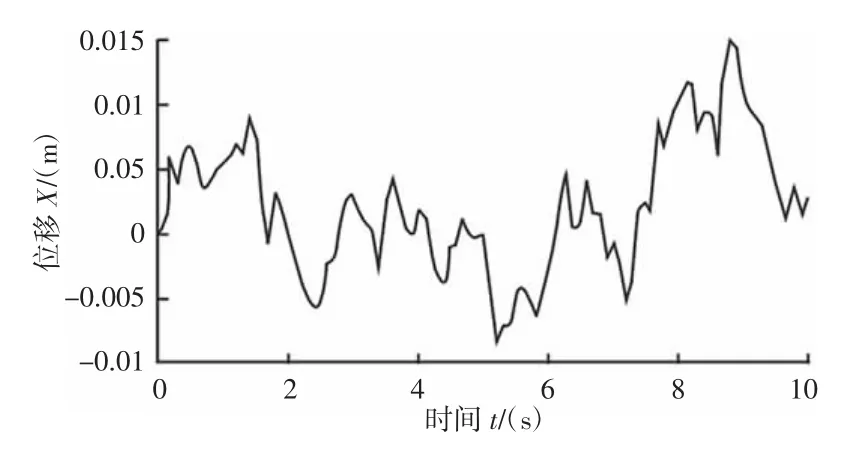
图5 随机白噪声(B 级)路面输入Fig.5 White Noise(B Level)Road Input
4.1 时域分析
基于半主动1/4 阻尼可调空气悬架的数学模型,设计滑膜控制器,对车辆进行平顺性仿真,选取常用的三个平顺性评价指标(车身垂向加速度、悬架动挠度、轮胎动载荷)进行时域分析,如图6 所示。由图6 看,滑膜控制器和理想的天地棚混合控制器作用下响应曲线趋势基本一致,且数值偏差不大,说明所设计的控制器对参考控制器跟踪良好且稳定。滑膜控半主动空气悬架的车身垂向加速度峰值较被动悬架均有显著改善,峰值和均方根值下降幅度明显,如表2 所示。
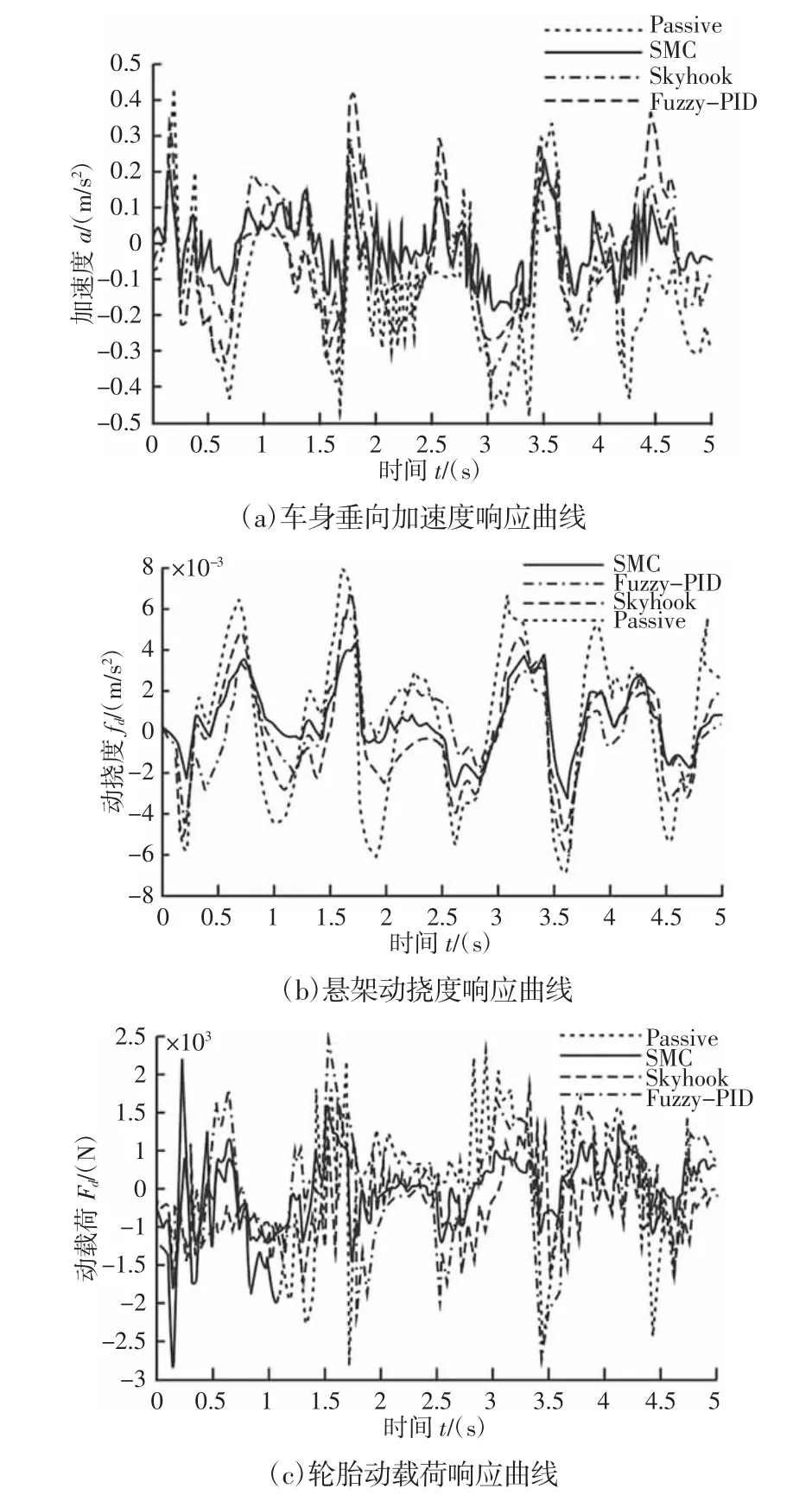
图6 平顺性仿真实验对比分析Fig.6 Comparison and Analysis of Ride Comfort Simulation Experiment
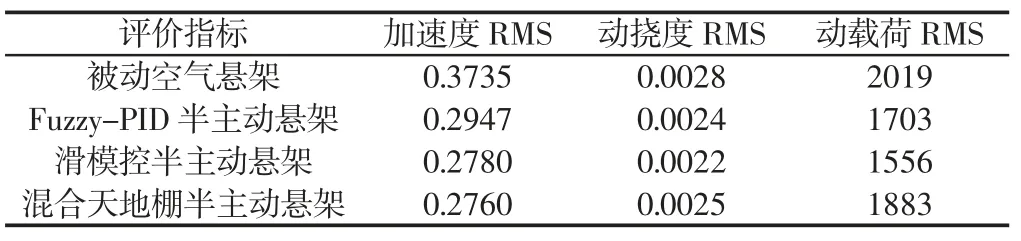
表2 仿真结果统计Tab.2 The Results of Statistical Simulation
由表2 可知,在滤波白噪声随机路面激励输入时,对比被动悬架,混合天地棚、Fuzzy-PID 和滑模控半主动空气悬架垂直加速度均方根值分别下降26.1%、21.1%和25.5%,滑模控制算法跟踪参考模型效果显著,改善了汽车平顺性。综合悬架动挠度和轮胎动载荷考虑,混合天地棚、Fuzzy-PID 和滑模控制算法均方根值分别下降了10.7%、14.2%、15.6%和6.7%、21.4%、22.9%,滑膜控制算法使车辆在行驶过程中悬架撞击限位块的几率降低,提高了路面友好性和行驶安全性。通过对几种阻尼可调式空气悬架控制策略数据的比较,所设计研究的滑模控制器作用效果明显,可以有效抑制车身垂向振动,改善乘坐舒适性,同时提高行驶安全性。
5 结论
(1)以膜式空气弹簧为研究对象,分析空气弹簧的垂直刚度非线性特性,推导出其垂直刚度模型。(2)建立阻尼连续可调的1/4 空气悬架的数学模型。针对此模型非线性较强的特点,遵循切换面滑动在模态区、所有相轨迹迅速到达切换面、运动姿态稳定三个条件设计出滑膜控制器。(3)选取理想的天棚地棚混合控制模型为参考模型,选取误差跟踪矢量建立误差动力学方程,依据系统单输入的特点设计切换面,采用等速趋近律抑制抖振,并求取满足动态品质的控制力。仿真结果表明,所设计的滑模控制器能有效跟踪参考模型且稳定性良好,该控制器作用下,被动悬架垂向加速度均方根值下降25.5%,动挠度均方根值下降21.4%,动载荷均方根值下降22.9%。说明本控制器性能优良,适用于复杂非线性悬架系统,且稳定有效。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:26:42
建材发展导向(2021年14期)2021-08-23 00:57:20
装备制造技术(2020年11期)2021-01-26 00:38:58
军事运筹与系统工程(2016年3期)2016-09-26 11:41:04
电脑知识与技术(2016年10期)2016-06-16 19:27:57
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
西南医科大学学报(2014年6期)2014-03-20 15:43:47
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
江苏大学学报(自然科学版)(2014年6期)2014-02-28 01:32:32
