一种基于二维码识别的无人机搬运设计
2021-03-04 22:22杨一帆雷晶晶潘晓云董德武
科学与财富 2021年26期
关键词:二维码
杨一帆 雷晶晶 潘晓云 董德武




摘 要:伴随着近年来物流仓储行业逐渐的发展,智能科技技术的进步,搬运无人机在应用科技上有了很大提升,也逐渐得到物流行业的认可。搬运无人机的创新优势在于可以利用在线编程以及识别二维码来完成各种预期的运输任务。在自身结构和性能上具有机器的独特优势,尤其体现了机器的智能性和适应性。搬运作业是指用设备握持物品,从一个初始位置移动到另一个指定位置,无人机可以安装不同的末端执行器和传感器,以完成各种环境下的物品搬运工作,大大减轻了繁重的体力劳动。
关键词:物流仓储;二维码;货物搬运
引言
当前,城市化不断推进,居民对于互联网需求逐渐提高,网购以及外卖需求量暴增,然而,货物分类以及运输作业有着极大需求量。本文设计的搬运无人机具有以下几大创新点:搬运机器人可以有条不紊的运输物品;利用中央远程控制平台进行远程控制以及航线规划。运输总系统可以高效地进行任意站点的运输航线设计,减少人力劳动浪费;同时搬运无人机可以在作业人员身体不适应或者在有安全隐患的环境下工作;使用搬运无人机可以合理的利用有限的空间面积,获取更多投资商的目光,确保作业环境的整洁,实现无人化流水线。
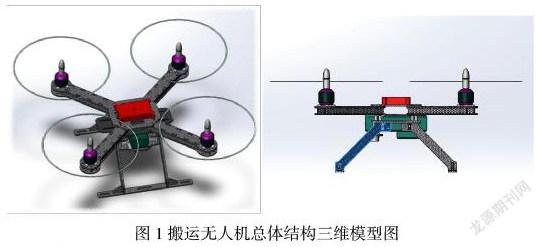
1 搬运无人机总体结构设计
无人机的结构主要部分有;低噪桨叶,无刷电机,云台相机,航模电池,激光定高,人工智能核心,飞控核心,电调,光流,碳纤机架,减震泡沫。利用无人机的快捷将货物绑定在无人机支架上,通过无人机的上升动力将货物带入空中,然后再通过提前是设定好的地点,让无人机到达指定位置。
2 搬运无人机的机械结构设计
搬运无人机由碳纤机架、航模电池、激光定高以及云台相机和减震泡棉等基本结构构成其基本框架,碳纤机架、云台相机与激光定高之间均采用高强度螺栓连接起来,无人机底盘与机翼也通过特殊材质的螺栓与地基稳固的连接。无人机在其首端可增加一个夹具装置,既最大化利用了空间,又保证了无人机搬运货物高效性。在无人机重要承载部位采用钢碳纤混合材料,形成承重骨架,包括碳纤机架、无刷电机固定端,以及夹具装置的自身重量,其在搬运无人机在安全方面具有重要研究意义。无人机采用的是无刷电机,其内转子一般极数少,转速高,转矩小,外转子一般极数多,转速低,转矩大,结构紧凑通过给线圈绕组高速的换向供电让磁钢持续的转动,换向采用电子器件,一般常用的MOS 管。一般的三相无刷电机[1]具有三相定子,为了防止转子被定子锁住,同一时刻必须以特定的方式按顺序为其中的两相通电,以产生旋转磁场。依照特定的通电顺序一般按照转子所处的空间位置不同,分为六步。
3 无人机控制系统介绍、数据交换以及避障原理
3.1编程控制系统设计
无人机采用的是语法简单的Python,其中List[2]是 Python 中使用最頻繁的数据类型。列表可以完成大多数集合类的数据结构实现。它支持字符,数字,字符串甚至可以包含列表。
3.2无人机数据交换原理
在多旋翼飞行器飞行过程中,为了便于对飞控状态的监测和控制,需要建立一个远程的多旋翼飞行器地面站,通信链路如图3。在飞控和工作站的通信链路中,硬件层采用 2.4G 无线透传模块。通过协议可以保证飞控和工作站的通信速率和高可靠性,将数据按帧传输,每一帧数据都表示特殊的含义。利用激光测距[3]的原理是利用光速的传播遇到物体后返回的时间来测量,当距离比较近,则从发射激光到接收到激光这段时间非常的短,测量设备的数据处理不及时,就出现了设备测量的最小距离极限,一般称之为测量盲区,高度数据在低于某一个高度之后,高度数据不再变化采用类似原理的超声传感器也有同样的问题,只是超声传感器的盲区会相对较小。
3.3无人机自主避障功能原理
无人机飞控姿态的解算需要用到3个传感器,陀螺仪[4],加速度计,磁力计[5]。一般情况下,通过陀螺仪数据积分就可以得到多旋翼飞行器的姿态,也可以通 过加速度传感器正交分解得到多旋翼飞行器的姿态,而两者结合互补则数据更加稳定多旋翼本身传感器具有一个坐标系,而多旋翼是处于地理坐标系中,所以需要将多旋翼的坐标系同地理坐标系联系统一起来。虽然我们肉眼能立即发现多旋翼的运动方位,但多旋翼自己并不知道自己相对于地理坐标系的运动关系陀螺仪和加速度计各有优缺点,而且恰好优缺点互补,所以当单一传感器不满足要求时,我们将多种传感器的数据融合,从而保证数据尽可能的更加准确。
4 无人机基本原理及流程
4.1无人机工作原理及流程图
使用者通过网络预定,在网上平台进行下单,在接受所需运输物品的大小及物品运输地点后,通过后台处理调配相应大小的无人机进行物品的运输。使用者只需要下订单,在预定位置接受货物即可。无人机通过对地形的扫描,与后台记录的地图数据相比较,这样,使得无人机能够精准的将货物送至客户手中。无人机后台通过对用户与商家的沟通以及对无人机的地图存储的扩展来达到物品的运输。无人机的动力大小影响着无人机可运输物品的大小,动力充足的无人机有着更高的效率。对于天气因素影响无人机的运输,在恶劣天气的情况下无人机服务会暂停,从而保证客户物品的安全。
4.2无人机一键起飞、降落原理
一键起飞分为全速上升,减速上升,高度保持三个阶段。在起飞的第一阶段,必须要快速上升的否则可能导致飞机起飞失败严重可能会炸机,第二阶段当起飞后接近目标高低需要减速上升,第三阶段是在目标高度附近维持悬停。一键起飞需要在定点模式下使用,如果没有在定点模式则需要飞手有较高的实践飞行经验,否则可能会导致起飞后飞机四处飘飞,从而使飞机炸鸡,严重可能导致事故。
5 降落原理
针对搬运物件重复工作量大、繁琐的问题,本文研究了一款可扫描二维码的无人机搬运,其主要由气压、激光传感器进行环境感知,配备有专门APP进行实时信息反馈,实现了人机互动的目的,确保货物准确达到目的地。无人机通过对地形的扫描,与后台记录的地图数据相比较,这样,使得无人机能够精准的将货物送至客户手中。无人机后台通过对用户与商家的沟通以及对无人机的地图存储的扩展来达到物品的运输。高效有序,本设计可以进行多无人机配合作业,减少了人工重复劳动力。
参考文献:
[1]梁伟健.一种高效三相直流无刷电机驱动方法探讨[J].2020年中国家用电器技术大会论文集《电器》杂志社会议论文集;2020(10)
[2]李俊铭.基于机器学习的数控自动编程技术研究与系统开发[J].广州大学 广东省
[3]樊里略,阮清,强陈佳.卷积神经网络的脉冲激光测距回波估计方法.激光杂志. 2021,42(07)
[4]吕骞,丁徐锴,陈鹤,贾佳,李宏生. 微半球谐振陀螺仪的模态主轴方位角测算方法[D].传感器与微系统. 2021,40(09)
[5] 陈海峰,冯春霖,应国德,高群,曹杰,崔粲. 基于无线输电的小型无人机位置控制研究[J]. 环境科学, 控制工程. 2021,28(07)
作者简介:
杨一帆,男,武汉商学院机器人工程专业学生,研究方向:智能机器人设计。
潘晓云,女,武汉商学院机器人工程专业学生,研究方向:工业机器人系统集成;
董德武,男,武汉商学院机器人工程专业学生,研究方向:机器人控制,智能机器人设计。
通讯作者: 雷晶晶(1990-),女,湖北武汉人,硕士,武汉商学院教师,工程师;主要研究方向:大学生创新创业教育。
基金项目: 大学生创新创业项目,项目号202111654003, 名称:病菌灭霸—新型智能消毒机器人。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
中国交通信息化(2022年6期)2022-08-30
数学大王·趣味逻辑(2022年10期)2022-05-30
童话世界(2020年32期)2020-12-18
心声歌刊(2020年5期)2020-11-27
小学科学(学生版)(2019年5期)2019-05-21
少儿美术(快乐历史地理)(2019年11期)2019-04-20
现代营销(创富信息版)(2018年10期)2018-02-21
学生天地(2017年10期)2017-05-17
人大建设(2017年5期)2017-04-18