
基于传感器技术的新型泵站水闸实时信息采集管理系统
2021-03-03 04:03王辉
水利科学与寒区工程 2021年1期
王 辉
(东莞市水利勘测设计院有限公司,广东 东莞 523115)
1 基于传感器的新型泵站水闸实时信息采集管理系统
泵站水闸是水利工程中的重要组成设备之一,通过启停、升降水闸,实现拦洪、挡潮、抬高水位、泄洪、排涝、冲沙、取水等水资源调动和调控活动,从而实现水闸的有效控制和管理[1]。
随着计算机信息技术、通信技术、控制技术的发展,新型泵站水闸逐渐取代了传统泵站水闸,使得水资源度调控更加自动化,提高泵站水闸工作效率,但是也由于新型泵站水闸的应用,传统的应用在泵站水闸管理中的实时信息采集管理系统无法满足新型泵站水闸控制的需要,信息采集和管理出现严重的滞后性[2]。本文为满足新型泵站水闸控制的需要,在传统实时信息采集管理系统的基础上,进行改进,研究集检测、监视、管理、控制、维护等为一体的综合性实时信息采集管理系统,全面提高系统的整体性能,以便更好地为新型泵站水闸服务。
1.1 系统整体框架设计
基于传感器技术的新型泵站水闸实时信息采集管理系统整体框架设计大体分为三个单元,即现场控制单元、远程控制单元和中间通信传输单元[3]。
(1)现场控制单元
现场控制单元负责对现场泵站水闸信息进行采集、处理、发送等操作,以及接收上位机发送过来的控制指令,并执行指令。该单元具体包括两种功能:①由布设在现场的各类传感器、视频设备采集泵站水闸水位、液压、闸高、开度、油泵电流等运行参数和状态信号,然后对这些信息进行处理,最后将其发送给上位机,为指令生成提供可靠依据[4]。②上位机根据传输过来的信息生成指令并发送给现场控制设备,控制闸门工作,包括启停、开度等,完成水资源调度。
(2)远程控制单元
操作人员在远控室实时查看水闸的运行状态,同时上位机根据现场设备采集到的信息进行分析,并得出闸门的具体控制方案[5]。该单元具体包括三种功能:①接收现场信息,并进行存储和在线显示。②生成控制命令并发送,完成对闸门的提升、下降、停止和同步纠偏等控制。③建立数据库,对实时和历史信息进行备录,并可随时查看,兼有报警等功能。
(3)中间通信传输单元
现场控制单元和远程控制单元之间需要中间通信传输单元作为桥梁,进行连接,完成信息传输和指令传输[6]。
1.2 系统关键硬件设计
1.2.1 传感器
(1)液位传感器
水位直接关系到闸门控制方案,因此液位传感器是整个系统中最关键的硬件设备之一。本系统中采用的液位传感器为MPM426W投入式变送器,用于闸门上下游水位计算[7]。该设备具体性能参数如表1所示。
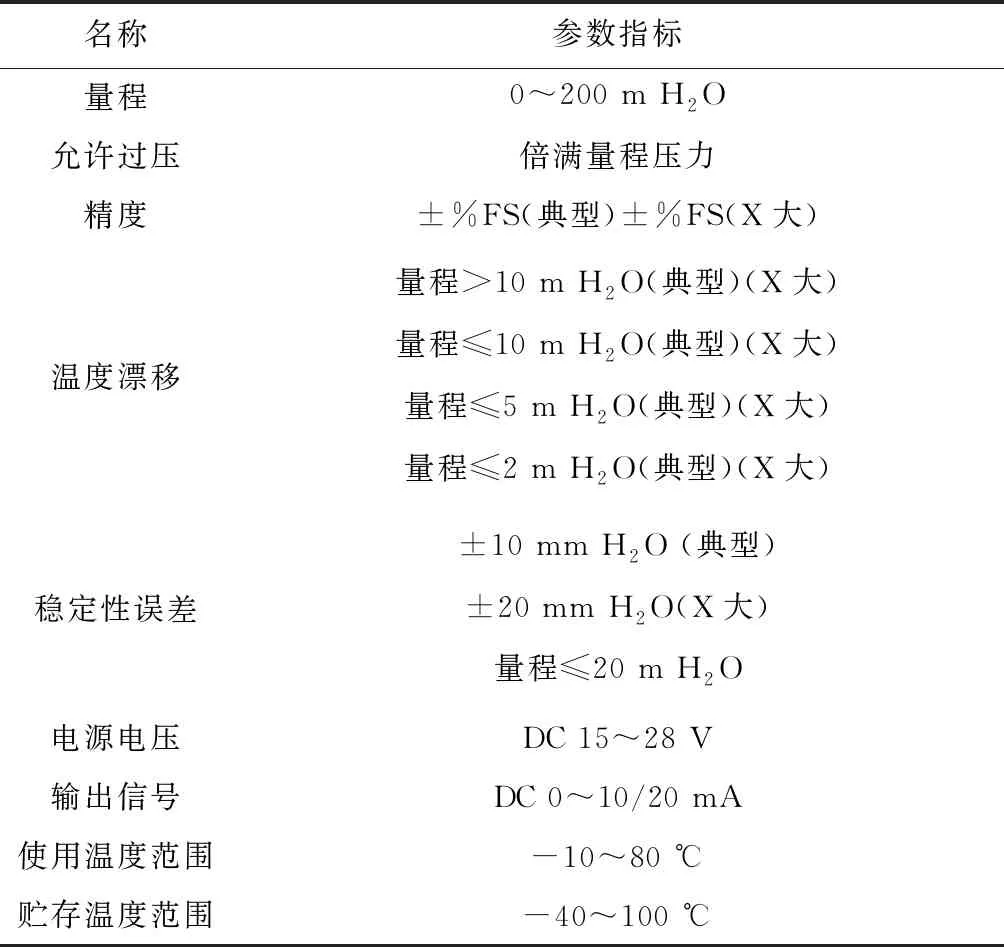
表1 MPM426W投入式变送器主要性能参数指标
(2)压力传感器
压力传感器主要作用是采集液压启闭机中的油液压力信息,油液压力是以压力油液作为介质来工作的,继而控制闸门提升、降落等行为[8]。本系统当中的压力传感器为德鲁克PTX 1400,主要性能参数如表2所示。
(3)闸门传感器
闸门传感器主要作用是检测水闸的状态信息,以便及时进行调整。本系统当中的闸门传感器为一种ZKC-3型闸门开度传感器。该传感器安装方便,适应性强,稳定可靠[9]。ZKC-3型闸门开度传感器主要技术指标如表3所示。
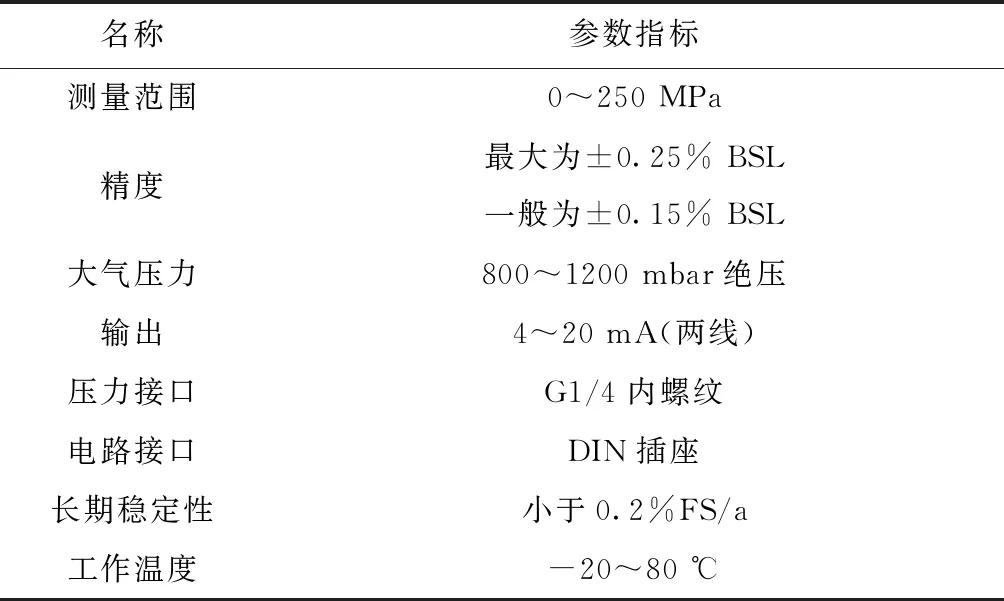
表2 德鲁克PTX 1400压力传感器主要性能参数
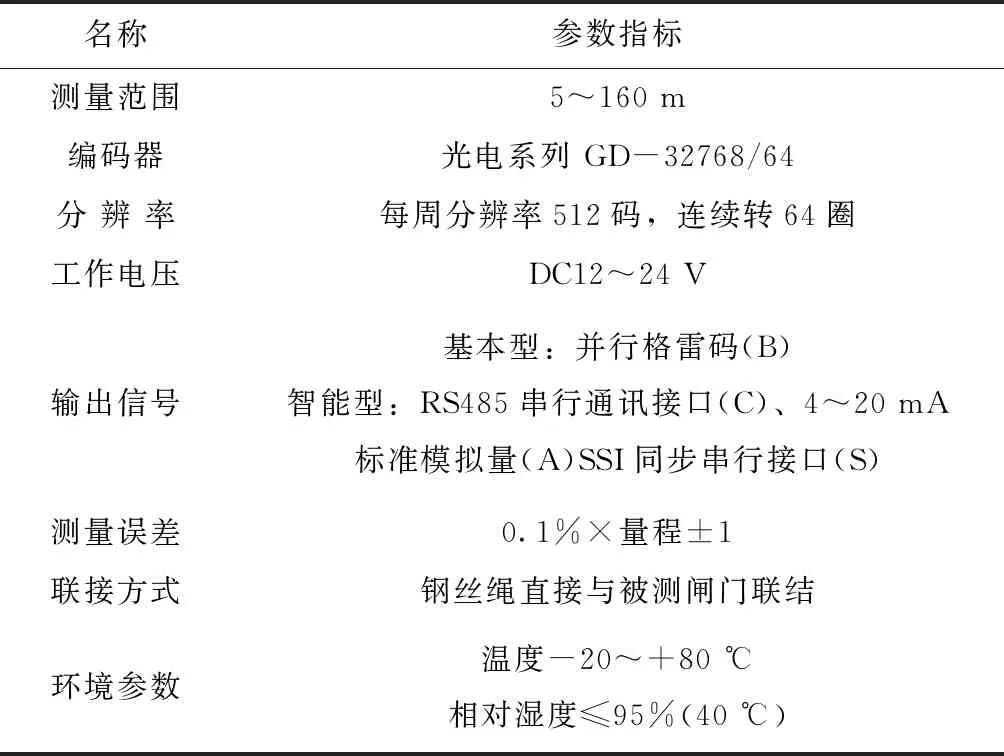
表3 ZKC-3型闸门开度传感器主要技术指标
(4)视觉传感器
视觉传感器的作用是对整个现场设备的工作环境进行监测,主要采集视觉图像信息,以便通过画面及时发现异常。 本系统当中的视觉传感器利用集成工业相机镜头拍摄的图像来确定目标物体的存在、大小、形状、方向和图案等。采用LED照明,相机和镜头的集成设计使用户可以更轻松地设置和管理设备。像机采用全景快门方式捕获精确图像,传感器具有13种基本检测功能,适用于各种应用。捕获的图像也可以直接保存到FTP服务器,以便单独管理和分析检测数据。
1.2.2 可编程控制器(PLC)
PLC是现场控制单元的核心,现场所有设备都通过I/O接口与之相连,实现现场设备的分布式控制。本系统当中的PLC为施耐德TWDL-CAC220DRF。该PLC主要性能特征有以下三点:
(1)10种本体,分别为10点、16点、24点或40点四种类型,其中6种本体分别可扩展4~7个数字量或模拟量模块,还可以添加显示界面、实时时钟卡或储卡等。
(2)内置模拟量I/O、可作为高速计数的快速输入、脉冲输出和以太网通讯等多种功能,帮助控制器满足OEM客户的设备控制要求。
(3)通讯协议:Modbus,CANopen,CAN J1939全部内部集成。
总而言之,TWDL-CAC220DRF具有灵活的配置,紧凑的结构,强大的功能,丰富的通信方式,CPU的Firmware可不断升级。
1.2.3 多处理器芯片Neuron
Neuron是远程控制单元的核心,起到主控作用。Neuron是一块大规模集成电路,主要集成了CPU、存储器、接口等部件,如图1所示。
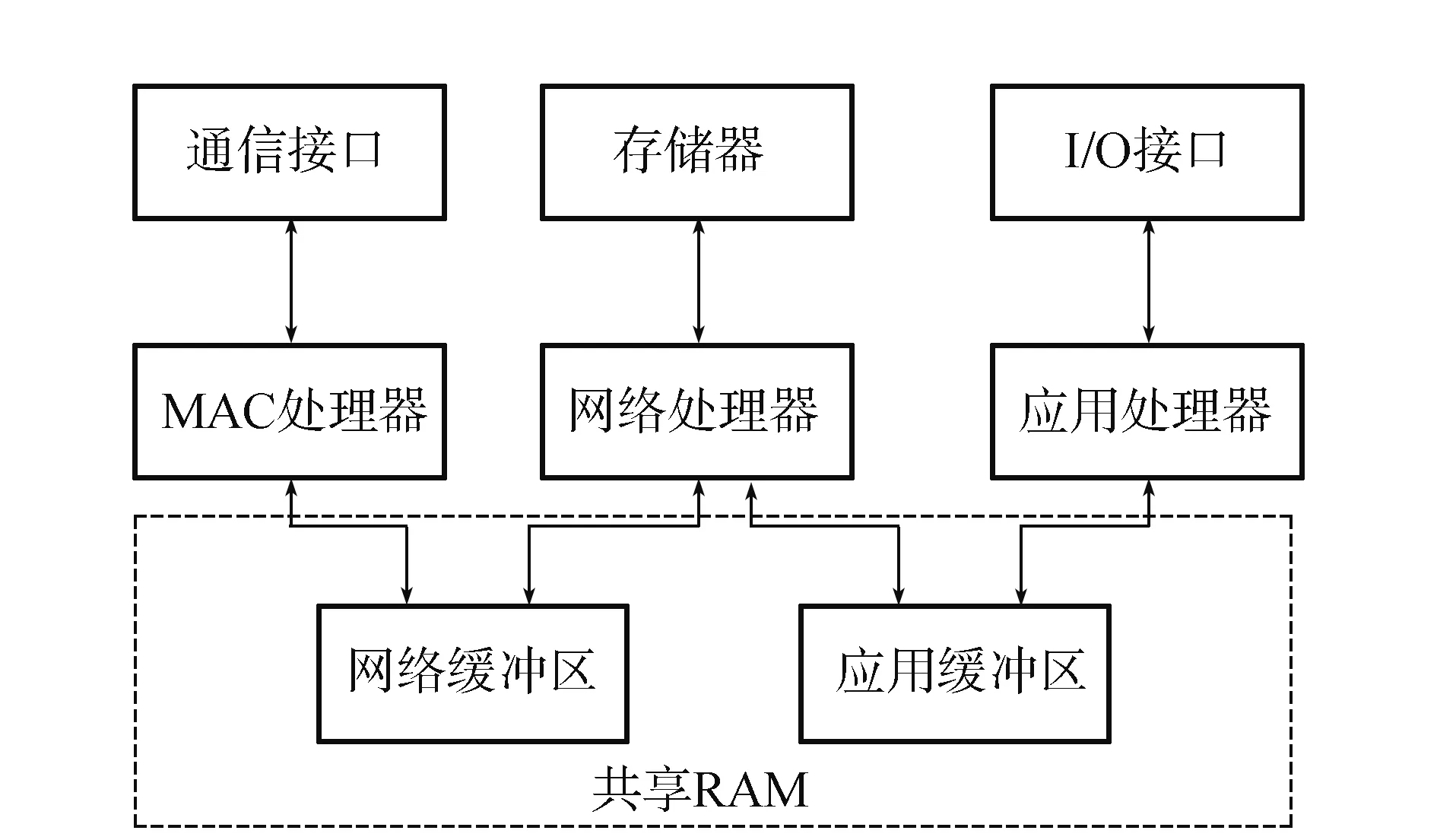
图1 Neuron多处理器芯片结构
Neuron由于集成了三种CPU,工作效率高、配置也更为灵活,同时也支持多种传输介质,能够实现泵站水闸群的同时控制[10]。
1.3 系统主要软件程序设计
本系统软件程序主要包括传感器信息采集程序、水闸控制程序、监控报警程序。下面进行具体分析。
1.3.1 传感器信息采集程序
本系统的关键是利用各种传感器进行新型泵站水闸实时信息采集,通过采集到的信息进行水闸控制,因此传感器信息采集程序是本系统中最关键的程序[11]。虽然有四种传感器类型,但是基础采集流程是大致相同的,具体如图2所示。
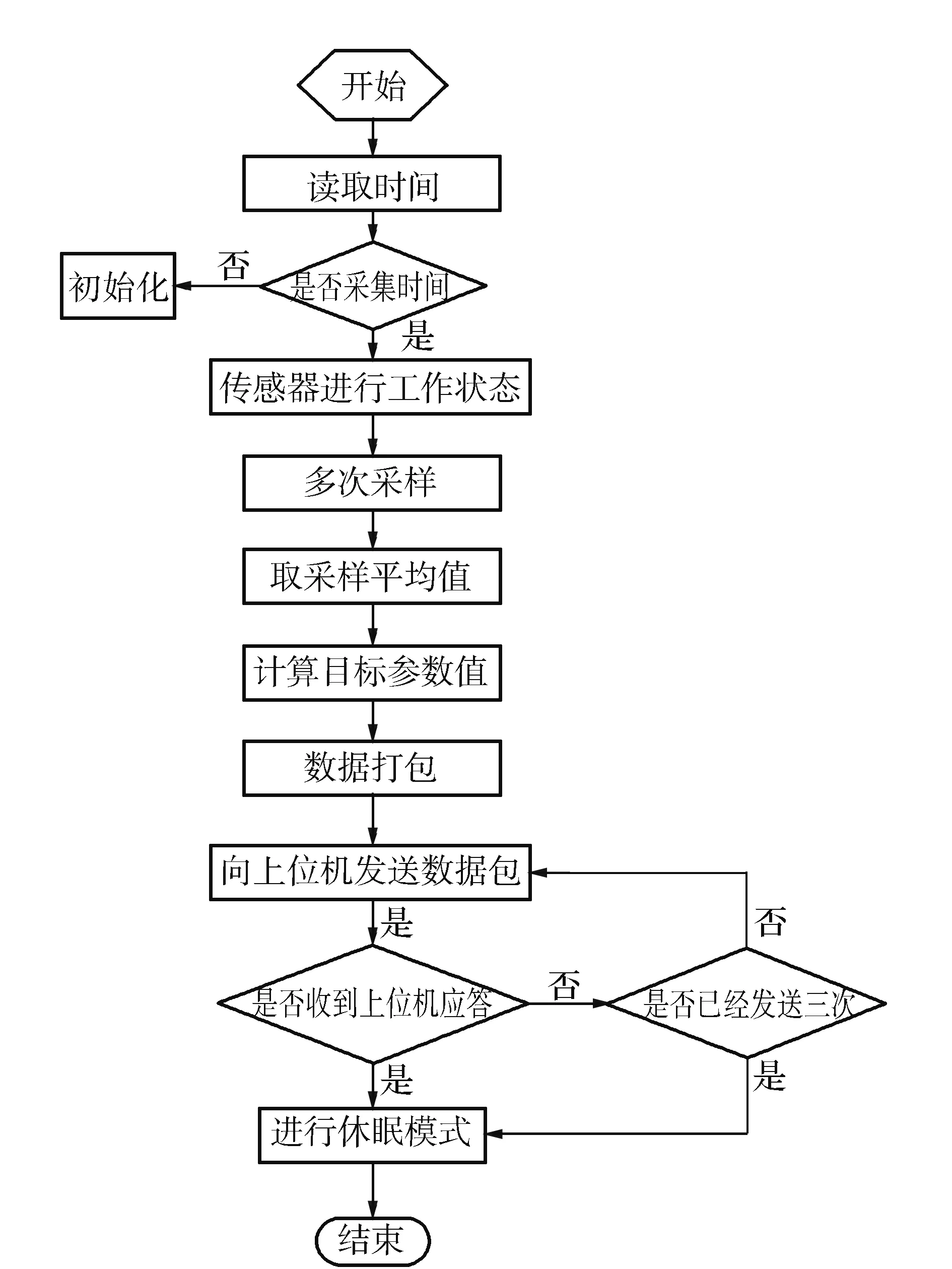
图2 传感器信息采集程序
1.3.2 泵站水闸控制程序
本系统研究的目的是通过采集到的信息更好的为泵站水闸控制服务,因此泵站水闸控制程序是本系统中另一关键程序[12]。根据水闸状态,分为水闸上升/下降子程序以及水闸左/右纠偏子程序,具体如图3所示。
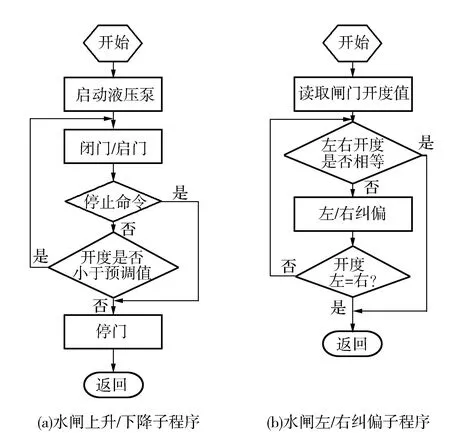
图3 泵站水闸控制程序
1.3.3 监控报警程序
为及时发现现场环境中的异常,监控报警程序至关重要。
(1)视觉传感器定时采样警情图像。
(2)对图像进行处理,消除干扰。
(3)判断是否存在异常?若不存在异常,则回到步骤1,若存在异常,则进行异常定位和登记。
(4)现场高分贝尖叫报警。
(5)向远程操作人员发送报警信息,并给出警情位置和类型。
(6)工作人员采取相应措施处理[13]。
2 系统测试与分析
系统理论设计完成后,还需要进行测试与分析,发现设计中存在的问题,以便及时进行改进。
2.1 系统测试环境
系统测试环境对系统测试与分析尤为重要,具体配置见表4。
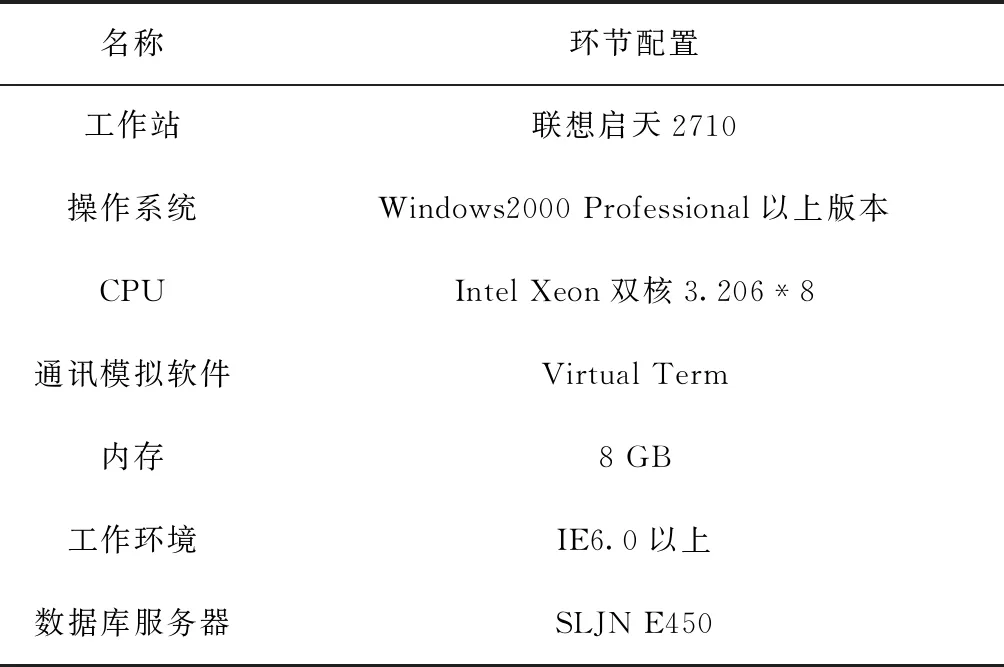
表4 系统测试环境
2.2 测试结果分析
系统测试方法一般分为白盒测试和黑盒测试两种,分别用于系统性能和功能。
2.2.1 白盒测试结果
在上系统环境设置的基础上,进行白盒测试,得到结果如表5所示。
2.2.2 黑盒测试结果
在上述系统环境设置基础上,进行信息采集测试以满足测试要求范围,得到结果如表6,水闸控制功能测试结果如表7。
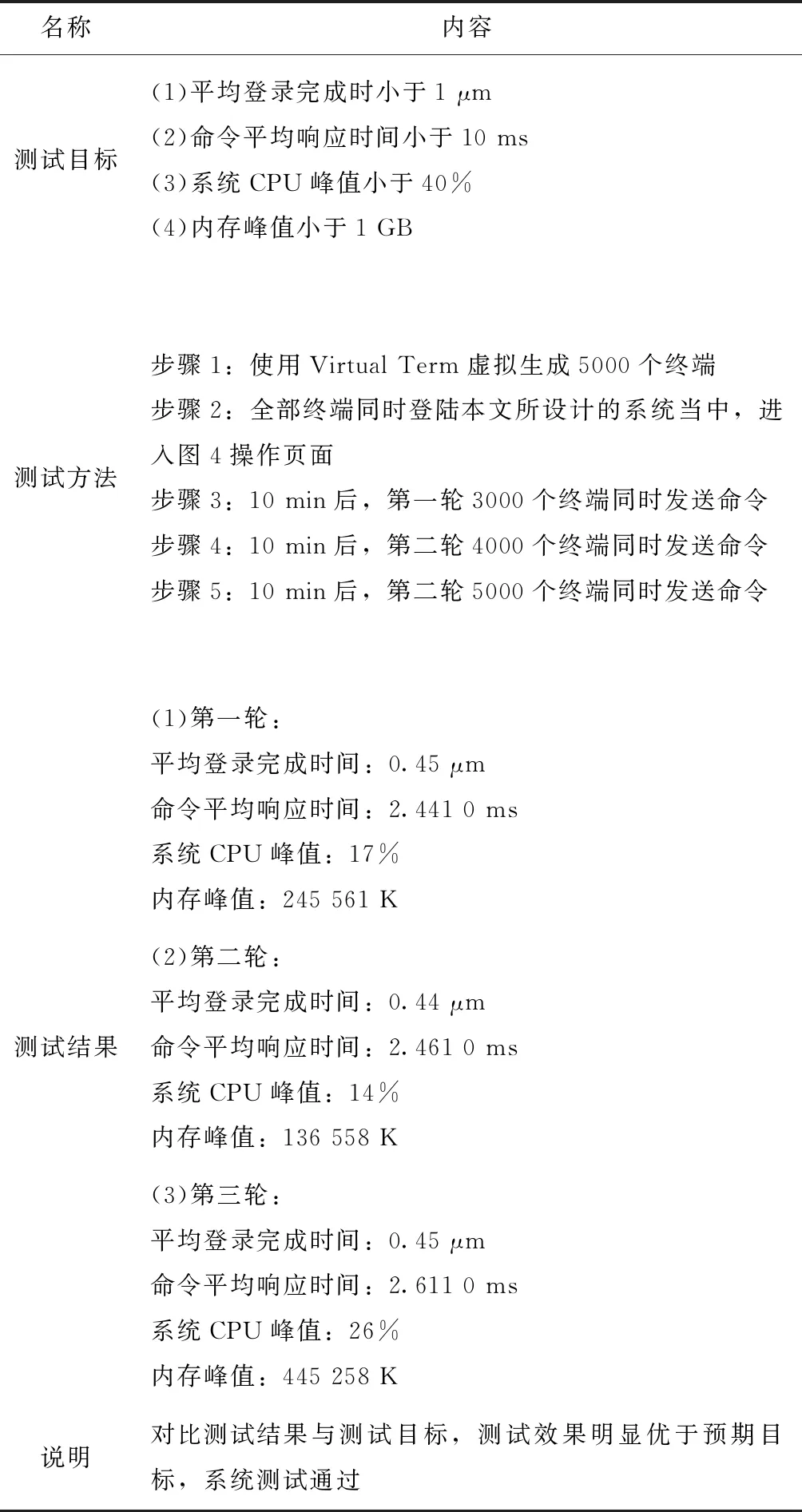
表5 白盒测试结果
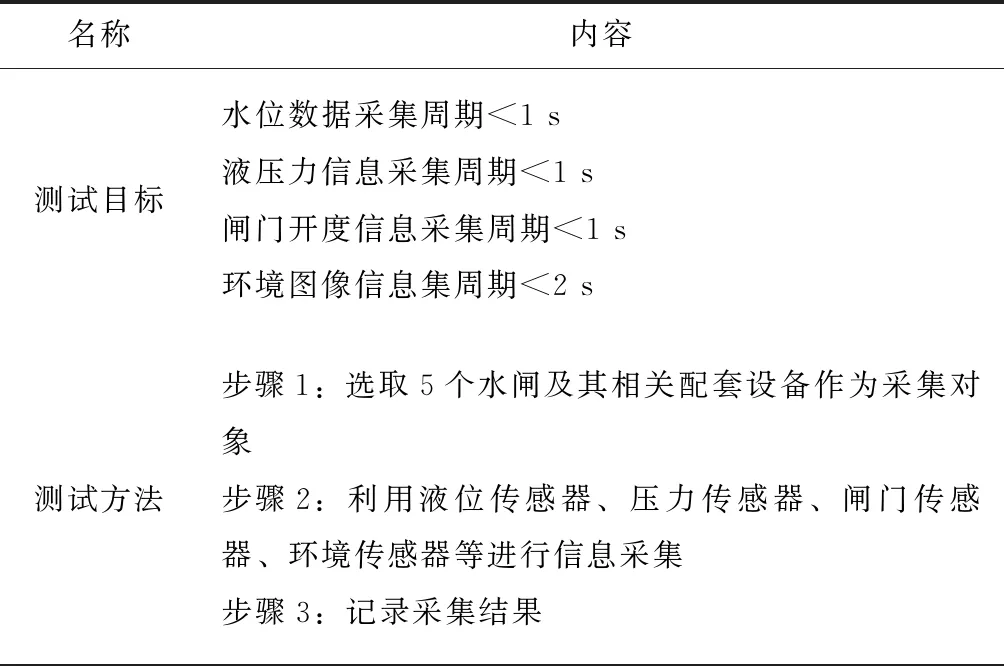
表6 信息采集功能测试结果
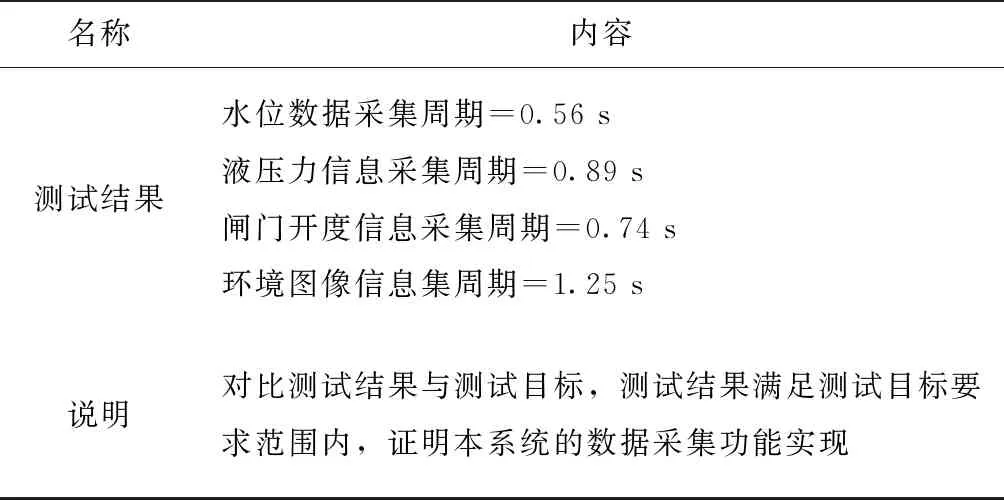
续表6
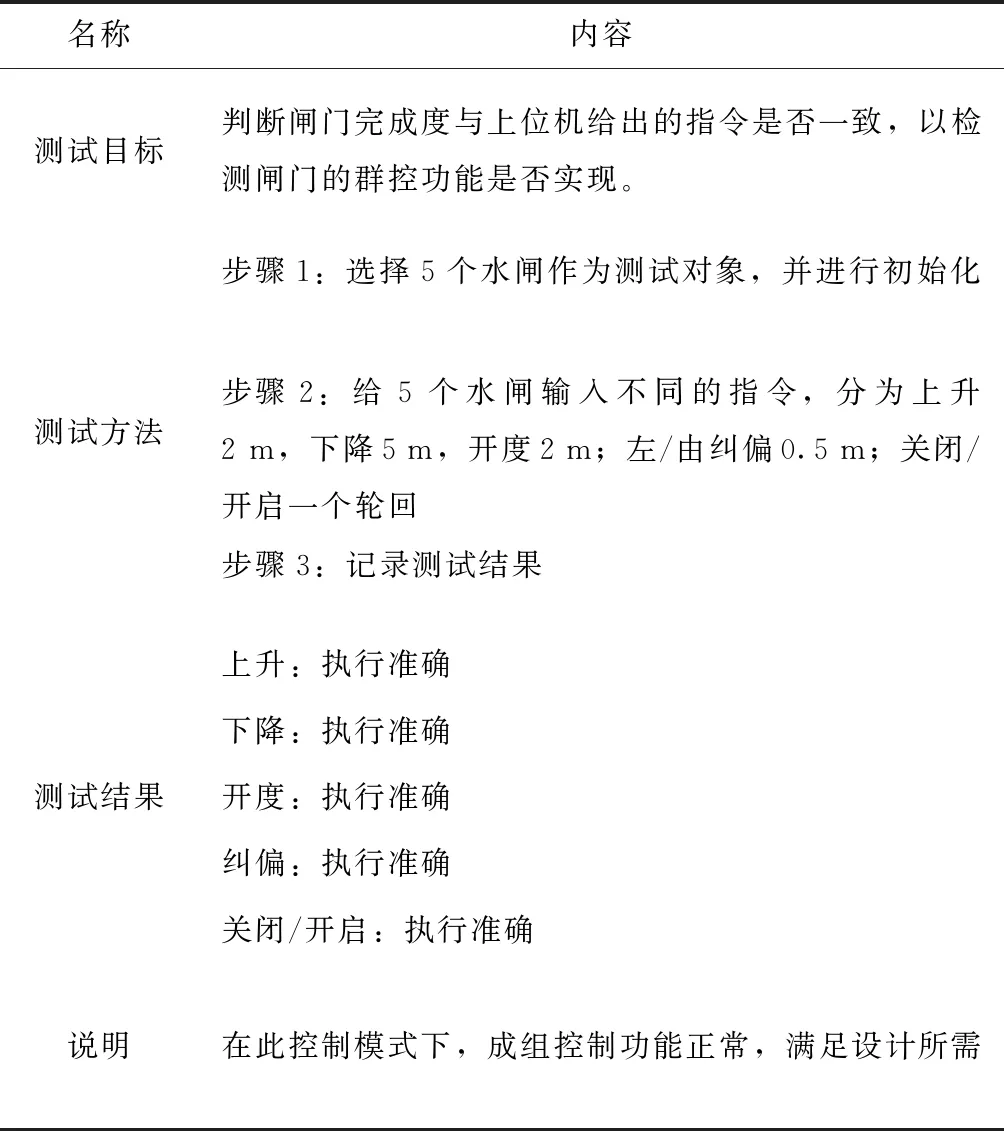
表7 水闸控制功能测试结果
3 结 语
本系统经黑盒和白盒测试,证明了其性能和功能均达到了预期要求,但是本系统设计还存在一些不足,如系统需要在实际环境中进行进一步测试,以保证系统能够在实际工作中得以应用,这也是未来研究的重点。
猜你喜欢
价值工程(2022年27期)2022-10-10
水泵技术(2022年3期)2022-08-26
湖南水利水电(2021年6期)2022-01-18
水电站机电技术(2021年12期)2021-12-21
湖南水利水电(2021年5期)2021-11-26
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年10期)2021-07-16
黑龙江水利科技(2020年8期)2021-01-21
水电站机电技术(2020年11期)2020-01-05
