
UWB定位的带电作业安全监测器的分析与设计
2021-03-02 08:22云南电网有限责任公司红河供电局王继康赵梦达李俊宇
电子世界 2021年24期
云南电网有限责任公司红河供电局 王继康 赵梦达 李俊宇
本文针对一种用于架空线路带电作业的安全监测器进行分析与设计。该装置集成了UWB定位模块、声光报警模块、蓝牙通信模块、显示模块及MCU模块,实时监控带电作业人员与周围带电体及接地体的有效安全距离,能够有效提升作业人员的安全程度。
架空线路长期运行在雨雪、大风等恶劣环境中,为了保证电力系统可靠稳定的运行,需要经常在架空线路上进行高压带电作业。根据电力作业的相关规程,在高压带电作业的过程中,作业人员及作业工具需要与带电区域保持一定的安全距离,避免发生安全事故。实际操作过程中,作业人员往往会因为客观因素导致违规行为,例如作业任务重、精力不集中或作业空间不足等。这些违规行为不仅会破坏电力系统的稳定性,甚至会危害到作业人员的生命安全。随着电力系统的发展和人们对电力系统稳定性认识的提高,高压人工带电作业开始逐渐成为相关从业人员的研究热点。
为了实时监控带电作业人员与周围带电体及接地体的有效安全距离来提升带电作业人员的安全程度,本文提出一种基于UWB定位的带电作业安全监测器,并从UWB测距原理、安全监测器硬件电路结构、安全监测器软件模块设计、实验验证等部分进行详细论述。
1 UWB测距原理
为了减少时钟偏差对测距产生的影响,本文采用DS-TWR(Double-sided Two-way Ranging)双边双向测距方法,具体实现步骤如图1所示。

图1 DS-TWR双边双向测距原理图
(1)记录时间T1,即设备A转变为接收状态的时刻,也是设备A给设备B发送数据包的时刻;
(2)记录时间T2,设备B接收数据包,处理时间为Treplay1。T3时刻,设备A返回数据包并进入接收状态;
(3)记录时间T4,设备A收到返回数据包,处理时间为Treplay2,在T5时刻给设备B发送最终数据包;
(4)记录时间为T6,即设备B收到最终数据包。
将飞行时间和电磁波传输速率相乘即为设备A、B之间的距离。
通过计算,当节点A和B之间相距在20m之内,时钟引入的误差会导致误差为0.5mm,基本忽略不计。因此DS-TWR双边双向测距是最常采用的测距方式。
2 安全监测器总体方案
带电作业安全监测器包括软件系统和硬件系统两部分,其中硬件系统主要由UWB模块(标签和基站)、声光报警模块、蓝牙通信模块、显示模块及MCU模块组成,如图2所示。其中UWB定位模块选用D-DWM-PGPLUS版本,有基于DW1000定位芯片开发的评估板定位基站,测距精度在±5cm,二维定位精度在±10cm,搭配0.96in OLED显示屏;MCU模块采用STM32F103单片机构建,基于ARM的32位微控制器,主系统由四个驱动单元和四个被动单元组成,具有中断延迟短、调试成本低的特点;蓝牙无线传输可以实现人机互动。
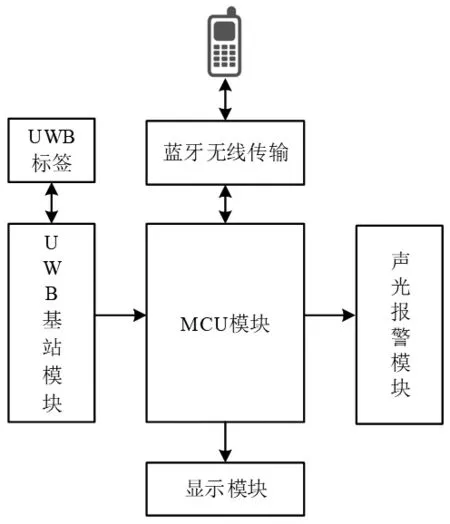
图2 硬件电路结构设计模块
软件系统将跟随硬件进行分模块设计,主要模块包括有安全距离监测和预警模块、声光报警控制模块、远程蓝牙传输模块。其中,UWB模块的设计包括基站软件设计和标签软件设计,分别如图3和图4所示。
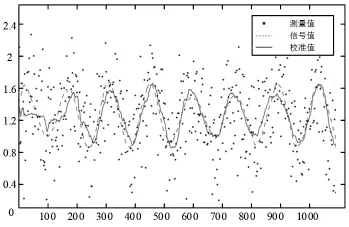
图4 基站与标签原始测距数据
图3为UWB基站软件流程图,首先初始化HAL函数库和GPIO口,然后开启计时模块,同时使能DW1000使其进入输入上拉工作模式,同时延时10ms开启Timer1的定时中断,最后进入while循环,每隔10ms进行一次DS-TWR双边双向测距。
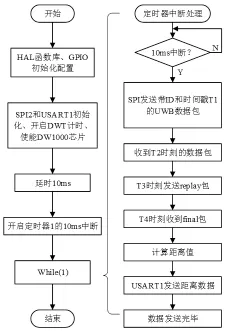
图3 UWB基站软件流程图
3 实验
为了得出符合电力规程要求的不同电压等级的安全距离,对UWB测距模块及声光报警模块进行实验室调试,直至符合要求。
根据电力规程要求,220v-380v架空及电力电缆的报警距离设置在0.8m-1.0m;10kv架空线路及电力电缆报警距离在1.2m-1.8m;35kv架空线路及电力电缆报警距离设置在1.5m-2.5m。图4的纵坐标单位为m,横坐标单位为ms,由此可知,在实验室测试和调试之后,误差在5cm内,达到了带电作业安全监测器的基本要求。
采用本文所述的基于UWB定位的带电作业安全监测器,可以实时监控带电作业人员与周围带电体及接地体的有效安全距离,能够有效提升作业人员的安全程度。
为了解决目前架空线路带电作业的困难,本文提出一种基于UWB定位的带电作业安全监测器,并从UWB测距原理、安全监测器硬件电路结构、安全监测器软件模块设计、实验验证等部分进行详细论述。
猜你喜欢
广西电业(2021年5期)2021-10-20
科学(2020年3期)2020-01-06
通信电源技术(2018年10期)2018-01-25
三联生活周刊(2017年32期)2017-08-11
电子制作(2017年7期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
现代工业经济和信息化(2016年4期)2016-05-17
IT时代周刊(2015年9期)2015-11-11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
