
嵌入式技术在工业机器人分拣技术中的应用研究
2021-03-02 08:21广东工业大学机电工程学院广东汇兴精工智造股份有限公司周友良
电子世界 2021年24期
广东工业大学机电工程学院 广东汇兴精工智造股份有限公司 周友良
广东工业大学机电工程学院 管贻生
为了使得工业机器人分拣更具有适应性,提出一种基于嵌入式技术改进的程序设计方法,利用相机采用信息后,通过嵌入式技术进行位置识别与抓取,同时通过硬件、软件方面的设置,提高检测与抓取的精度。这一过程中,通过智能摄像头读取工件信息,调整工件参数,然后通过主控单元调试优化工业机器人工件识别与分拣。研究结果表明,通过改进程序设计方法,即利用嵌入式技术能够提高工业机器人分拣的精度。
随着人工劳动成本逐步上涨,高性价比的机器人需求量进一步增加,大幅推动了这一领域的发展。机械工件分拣作业是工业生产流程中极为常见的工作任务,旨在将归属于一类的物品进行挑拣进行划分,或者分拣有质量缺陷的机械工件。就现实而言,工业机器人分拣作用需要克服诸多困境,如智能化水平较低等。为实现分拣操作作业的顺利进行,工业机器人需要明确待分拣的工件类型,以及这些工件产品在传送带运动时的位置信息,因此需要设计人员为工业机器人进行一定程序的设计,通过安装图像传感器设备,让其了解外部图像信息能力,从而满足分拣种类繁多的机械零部件要求。
1 工业机器人分拣识别系统硬件构造及运作原理
在实际应用中,工业机器人分拣识别系统的硬件构成部分是通过以太网连接而成。这之中,硬件构成部分既涉及视觉通用相机系统,也包括机械人装置、PLC控制单元,以及智能运料小车等设施。不仅如此,这一设备采用智能摄像机为工业机器人的视觉识别系统,主要型号为SV4-30ML。同时,可编程控制器系统采用S7-1200型号的1215C。工业机器人分拣识别系统主要通过智能识别摄像机这一设备,以TCP通信协议与两个PLC之间进行通信。详细而言,工业机器人分拣识别系统运作过程如下所述,如图1所示。在工件装配线上打造较为准确的智能视觉系统,这一系统主要由三部分构成,光源、控制支重轮、透镜及相关配件。在这些系统中,光源采用背面光模式。另外,在进行具体单元检测过程中,机械工件中的视觉系统会通过装配线识别工件的具体形状及相应类型,而后将这一信息输送给主控系统,而后通过主控PLC系统来控制6轴工业机器人进行对应工作。
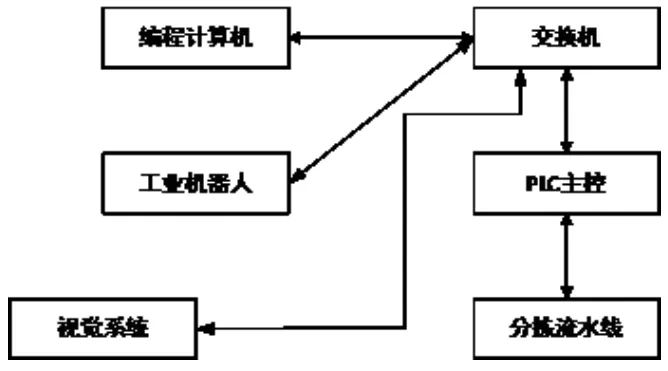
图1 工业机器人分拣系统硬件设计
2 基于嵌入式技术的软件平台搭建及应用
以嵌入式技术为核心的工业机器人的工件分拣流程如下所述。每一托盘均可以放置任一工件,抑或是空托盘。首先,托盘装配线接到命令,将托盘运输到嵌入式技术的视觉监测站,通过智能相机的定位识别系统,在将设备相关信息读取之后传送到对应的主控单元系统。在此环境之下,主控单元完成数据读取工作之后,再将托盘置于相关位置进行存储。
2.1 控制系统对软件系统要求
第一,可靠性良好。可靠性对于工业控制系统而言是首位目标,且是分拣作业的关键内容。较低故障率及良好的可靠性会大幅提升任务执行效率。此时,工业机器人如要执行分拣工作,需要软件系统的良好运作提高整体分拣效率。第二,实时性较好。工业机器人控制系统的实时性,不仅表现在响应用户操作较好方面,还体现在控制系统的指令作出响应,完成既定工作规范要求。如此一来,机器人可在同一时间达成多项任务时,需要及时在不同软件之间进行切换,甚至采取部分任务中断来执行相关操作。第三,正确性要高。在精密分拣领域,机器人分拣的内容需要准确率高,而且需要执行大量相应指令,这就对工业机器人提出更高要求。第四,抗干扰要求较高。多数情况下,工业机器人在执行高强度的重复性分拣工作,这不仅需要可靠的硬件支持,还需要有相关软件的适应性。
2.2 嵌入式操作系统选择
一般情况下,嵌入式操作系统主要选取Linux,理由如下。第一,成本较低。Linux采用GPL许可证,且在商业环境下应用无需购买许可证,这大幅降低企业系统购买成本。另外Linux为大量软件资源开发者提供了更多样的免费资源。凭借这一优势,开发者通过GPL协议发布免费资源,能够进一步降低自身的开发成本。第二,稳定性高。Linux内核在服务器行业的广泛应用极为稳定。第三,硬件支持性较好。Linux系统支持硬件极为广泛。Linux很好支持ARM920T核心的S3C2440芯片,且移植到开发板较为容易。
2.3 基于嵌入式技术的工业机器人分拣系统总方案设计
在设计工业机器人分拣控制系统进程中,为保障整个分拣系统有序、实时性,本文选用Linux操作系统进一步完成底层硬件管理工作及系统调度任务。随后,以嵌入式技术设计了完整工业机器人分拣控制系统。
在运行工业机器人分拣操作系统时,首先需要进行上电自检、硬件复位等流程,从而确定系统的硬件是否符合系统要求。同时,这一过程还需将操作系统或其他代码拷贝到系统盘中。此时,工业机器人分拣的嵌入式操作系统一般不具有BIOS功能,所以需要通过BootLoader完成。这一过程中,鉴于BootLoader是由一段代码构成,因而笔者在使用新硬件时,需要按照硬件情况及需要的操作系统进行移植。当BootLoader引导操作系统运行后,此时还需要对文件系统进行修饰,从而方便对硬件的操作。此外,文章还会利用以太网实现对驱动器与控制系统的通信。这一过程主要利用Linux的网络芯片编写进行驱动,从而完成玩了个协议的收发操作。
2.4 系统调试方法
此时构建的嵌入式机器人控制系统分别由BootLoader、Linux内核、人机界面、网络芯片驱动等部分构成。每一部分需要修改对应的代码。为进一步完善系统,文章将对系统调试环境进行优化。针对机器人分拣系统调试来说,应采用主机+目标机的方式完成。一般情况下,程序在主机编写,从而编译成为目标机识别的代码,并利用其他方式将代码下载到目标机。随后在操作过程中,文章对目标机进行在线调试,调试环境如图2所示。
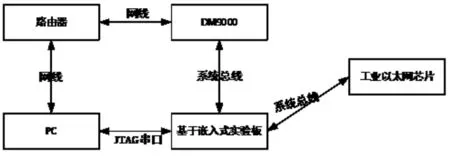
图2 系统调试环境
在调试BootLoader的过程中,需要验证工业机器人嵌入式系统的调试程序。考虑到实验板尚未建立任何可用程序,因而事先需要借助JTAG接口下载相关应用程度。另外,还需利用串口打印调试信息,评判整体程序运作过程是否执行了指定功能。在进行调试过程中,如若工业机器人通过BootLoader测试后,说明就可以利用这一程序价值相关程序,从而实现分拣工作。接下来,系统会通过USB加载接口程序,下载Zmodem协议、文件系统等诸多内容。如此一来,本次调试过程需通过打印调试完成。待系统进一步运作之后,文章可以通过NFS驱动方式,下载相关应用及网络芯片驱动。
3 研究结论
综上,对嵌入式技术的工业机器人分拣系统进行设计及调试,并利用示教记录工件信息,发现机器人能够正确分拣和装配工件,也可将空托盘放置收集处。此时,工业机器人能够重复新一轮任务要求,及时对工件的分拣。换言之,工业机器人即通过“识别工件、定位位置、抓取工件、释放工件”一系列操作,完成不同工件抓取与分拣任务,并将安装任务要求放置到对应存储区。研究实验表明,以嵌入式技术的工业机器人分拣系统实现分拣和识别的正确率较高,取得预期效果。
猜你喜欢
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年12期)2018-08-01
铁道通信信号(2018年2期)2018-04-18
现代机械(2018年1期)2018-04-17
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年19期)2017-02-02
电镀与环保(2016年3期)2017-01-20
当代化工研究(2016年6期)2016-03-20
焊接(2015年9期)2015-07-18
单片机与嵌入式系统应用(2014年9期)2014-03-11
