
SDBD等离子体增强双股矩形射流掺混性能实验研究
2021-03-01 09:49车学科李修乾李金龙宁永建陈庆亚王皓田
气体物理 2021年2期
车学科, 李修乾, 李金龙, 宁永建, 陈庆亚, 陈 川, 王皓田
(1. 航天工程大学, 北京 101416; 2. 太原卫星发射中心, 山西太原 030000)
引 言
姿轨控液体火箭发动机的燃烧效率是决定卫星、 空间站、 深空探测器等各类航天器寿命的关键因素. 但姿轨控液体火箭发动机头部喷注器单元数量一般较少, 燃烧室容积也很受限, 导致推进剂雾化、 掺混性能相对较低, 尤其是发动机处于脉冲工况、 变推力工况下, 雾化、 混合性能更是受到显著影响. 提高喷注过程中射流掺混特性, 将有效增强燃烧效果[1].
喷嘴是发动机中将推进剂喷注到燃烧室的重要部件, 直接影响喷注射流掺混性能, 进而影响发动机点火与燃烧效率. 国内外对喷嘴特性已经开展了大量实验与仿真研究[2-10], 主要集中于雾化特性, 或者燃烧不稳定问题, 对推进剂喷注射流、 掺混性能的关注较少[11]. 喷嘴结构一定时, 对喷注状态进行调节相对困难, 发动机深空复杂条件下点火与燃烧效率降低[12]. 对喷注射流进行控制, 增强射流掺混特性, 使姿轨控液体火箭发动机能够适应复杂环境, 具有现实需求.
射流控制技术分为主动控制技术和被动控制技术. 被动控制是指使用预先加工的机械结构或者控制装置对射流进行恒稳强度的控制, 成本较低, 容易实现; 缺点是控制带宽窄, 附加结构较大[13].
主动流动控制是流动控制领域的热点方向, 对射流边界层、 剪切层施加扰动, 使射流掺混特性发生改变[14], 能改善被动流动控制中适应工况窄等缺点[13], 控制手段相对灵活, 具有执行稳态与非稳态控制能力[15]. 主动流动控制技术激励器产生的扰动能够与主流直接耦合, 实现复杂系统精确控制, 增强射流掺混性能, 从而提高发动机燃烧效率[16]. 表面介质阻挡放电(surface dielectric barrier discharge, SDBD)等离子体流动控制是一种新型主动控制技术, 具有尺寸小、 质量小、 可靠性高等优势, 在飞行器机翼增升减阻、 激波控制、 螺旋桨/旋翼/风力发电机桨叶流动控制、 细长锥体大迎角前体涡控制、 涡轮压气机扩稳、 防冰/除冰等领域具有广泛应用前景[17-23].
使用SDBD等离子体控制射流的研究相对少得多. Samimy等[24]提出一种用于控制亚声速和超声速射流的局部电弧等离子体激励器, 实验表明在最佳激励强度下, 射流核心区长度较无激励时缩短了6~8个当量直径, 中心线速度由于核心区外大尺度涡结构的作用迅速衰减. Benard等[25]采用SDBD激励器增强圆形射流与环境空气之间的掺混, 发现每个激励器上造成了两对反向旋转涡, 将更高速度的核心流体带到环境空气中, 缩短了射流核心区长度. Li等[26]发明了一种基于SDBD激励器的旋流式喷嘴, 实验结果表明等离子体降低了射流速度, 使得燃料在更短距离内进行燃烧. 李亮等[27]实验分析了SDBD等离子体激励器对单股矩形空气射流掺混特性的影响, 讨论了激励电压、 脉冲频率、 占空比等参数对射流的影响, 获得了有价值的研究成果.
近年来, 采用液氧/煤油、 液氧/甲烷等绿色无毒推进剂逐渐成为姿轨控液体火箭发动机的主流趋势, 推进剂喷注方案关系到点火、 燃烧组织等关键过程, 其中同轴式喷嘴受到越来越多的关注[28-31]. 面对这一需求, 本文将在李亮等单股矩形射流等离子体流动控制研究基础上, 针对同轴式喷嘴双股射流特点, 对其进行简化后构建双股矩形射流发生器, 开展等离子体流动控制实验, 分析双股矩形射流的特征及等离子体控制效果.
1 实验设备与条件
1.1 实验系统
实验系统如图1所示, 主要包含低压舱、 射流发生系统、 等离子体发生与控制系统、 激光粒子测速 (particle image velocimetry, PIV) 系统4部分. 低压舱一方面用于产生一个不受外界气流干扰的实验环境, 另一方面利用其与外界大气之间的压力差产生实验射流. 低压舱为圆柱型, 内部直径为600 mm, 长度为800 mm, 采用真空硅管控制舱内压力, 精度约100 Pa. 低压舱顶部与侧面有直径为200 mm石英观测窗, 顶部观测窗用来透过PIV激光, 侧面观测窗用于CCD相机进行拍摄. 射流发生系统包括2个半封闭发烟罐、 矩形射流发生器、 限流孔板、 以及管路、 阀门等. 发烟罐与外部大气相通, 在内外压差作用下自然形成喷入低压舱的射流, 同时挟带罐内的PIV示踪粒子进行拍摄. 限流孔板用于调节射流速度, 共有1.5, 2.0, 2.5 mm这3种孔径. 等离子体发生与控制系统包含SDBD激励器、 激励电源、 皮尔森线圈6595、 安捷伦N2771B高压探头与安捷伦DSO3024A示波器. SDBD等离子体激励器采用铜箔与Kapton胶带制作. 激励电源采用中科院电工所研制的HFHV30-1高频高压交流电源[32], 输出电压±15 kV, 输出频率1~50 kHz, 通过两个高压接线柱引入低压舱.
PIV系统包括Nd:YAG双脉冲式激光器、 同步控制器、 CCD相机、 计算机和图像处理软件. 激光波长为532 nm, 单脉冲能量350 mJ, 脉冲宽度6~8 ns, 重复频率为5 Hz. CCD相机为Kodak 科研级芯片相机, 分辨率2 048×2 048. 实验过程中采用烟饼燃烧烟雾作为示踪粒子, 待粒子稳定后激励器开始工作.
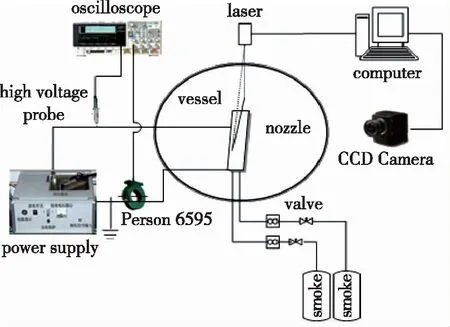
图1 实验系统Fig. 1 Experiment system
1.2 矩形射流发生器
矩形射流发生器是形成实验射流的关键部件,其横截面为矩形, 如图2所示, 共包括上下两个通道. 两个通道的出口宽度均为27.0 mm, 高度均为3.0 mm, 管壁厚度为1.5 mm. PIV所测平面即入射激光平面为xy平面,z为宽度方向.
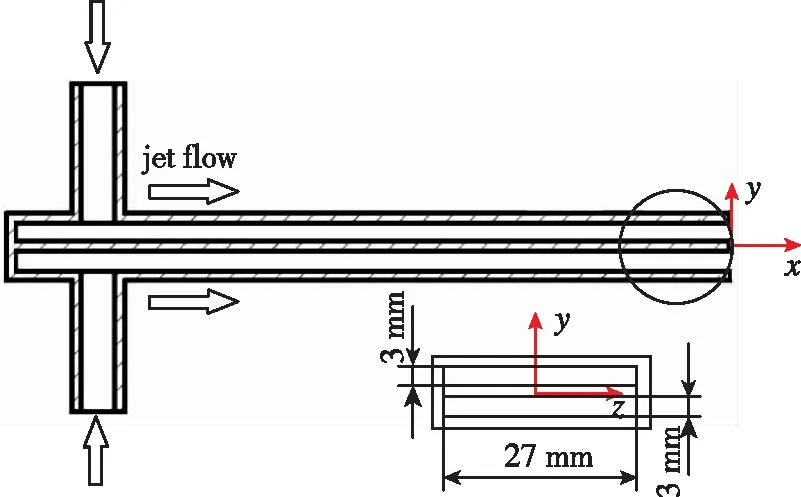
(a) Schematic diagram

(b) Material object图2 射流发生器Fig. 2 Jet generator
射流发生器采用石英玻璃制作, 出口处布置SDBD等离子体激励器, 如图3所示. SDBD等离子体激励器电极采用铜箔制作, 暴露电极宽5.0 mm, 植入电极宽9.0 mm, 电极间隙为0.0 mm, 两电极厚度均为20.0 μm, 电极外缘距出口距离为0.0 mm. 介质层采用Kapton胶带制作, 总厚度约80.0 μm.

图3 SDBD等离子体激励器及其布置位置Fig. 3 SDBD actuator and its location
1.3 实验流程
首先, 将低压舱内气压调至80.0 kPa, 舱内外压差约为21.0 kPa, 测得舱内温度为26.1℃. 通过安装不同孔径的流量限制孔板对射流流速进行调节, 此时1.5, 2.0, 2.5 mm这3种孔径对应理论出口流速分别约为5.97, 10.63, 16.6 m/s. 共进行了1.5∶1.5, 1.5∶2.0, 1.5∶2.5这3种射流速度下的实验, 为方便起见采用孔板面积的平方即1∶1, 9∶16, 9∶25 表示这3种实验. 其次, 点燃烟饼以产生足够示踪粒子, 开启射流管道阀门, 使挟带示踪粒子的空气进入到射流发生器中. 第3步, 射流稳定一段时间后开启PIV进行测量记录, 由于低压舱容积有限, 每次实验共记录24对图片. 最后, 开启SDBD等离子体激励器, 同时采用PIV拍摄24对图片. 实验中固定激励电压为8.0 kV, 脉冲频率为50 Hz, 占空比为50%.
实验结束时舱内气压约为80.6 kPa, 温度为26.6 ℃, 实验环境变化对射流影响较小, 可以忽略. 由于实验为人工手动操作, 实验条件参数有一定误差, 但不影响对规律、 趋势的分析.
2 实验结果与分析
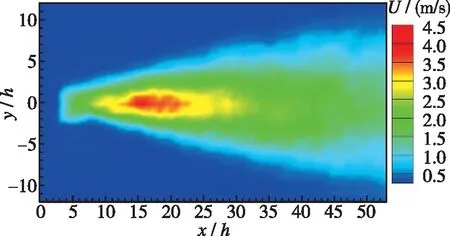
图4所示为不同速度比下射流速度分布,U为流场速度. 从图中可以看到, 射流发生器出口附近区域射流速度与理论流速差别较大, 主要原因有两方面, 一是射流发生器出口处示踪粒子浓度过高, PIV计算软件无法进行准确解析, 得不到正确显示的射流初始段核心区速度; 二是每次实验PIV的跨帧时间为固定值, 导致测速范围有限, 超出范围的速度无法准确测量, 所以实验中以确保观测到射流核心区为主要原则. 为保证实验结果真实可靠, 本文后续的分析采用x/h=10.0以后的部分. 总体而言, 施加等离子体控制后, 射流核心区长度缩短, 宽度增大, 这与单股射流控制实验结论相同[25,27].
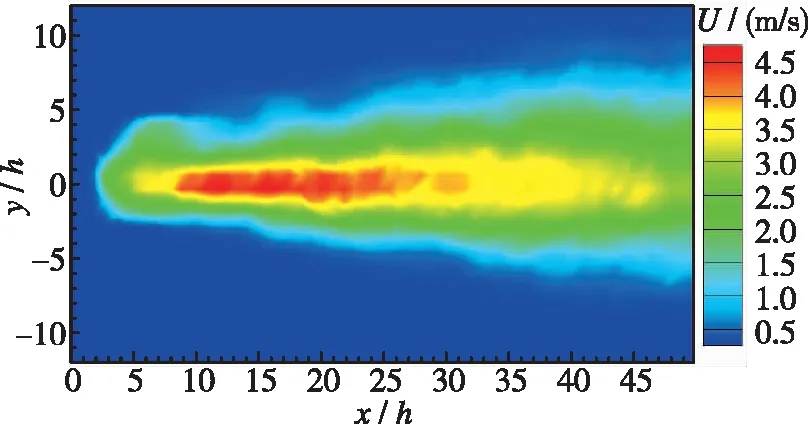
(a) Plasma off (1∶1)
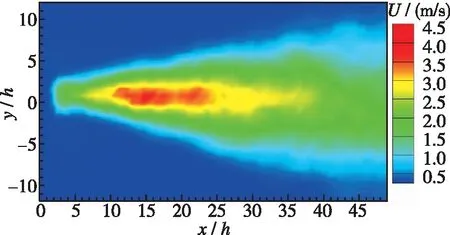
(b) Plasma on (1∶1)
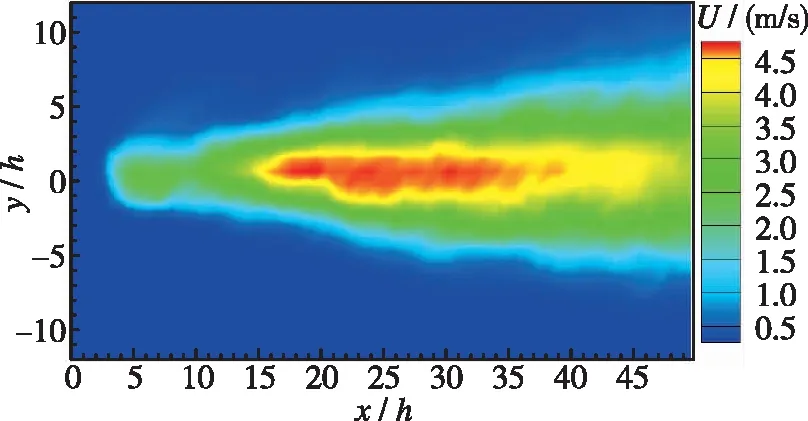
(c) Plasma off (9∶16)
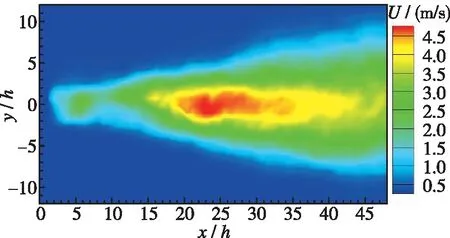
(d) Actuator setted in low-speed jet(9∶16)
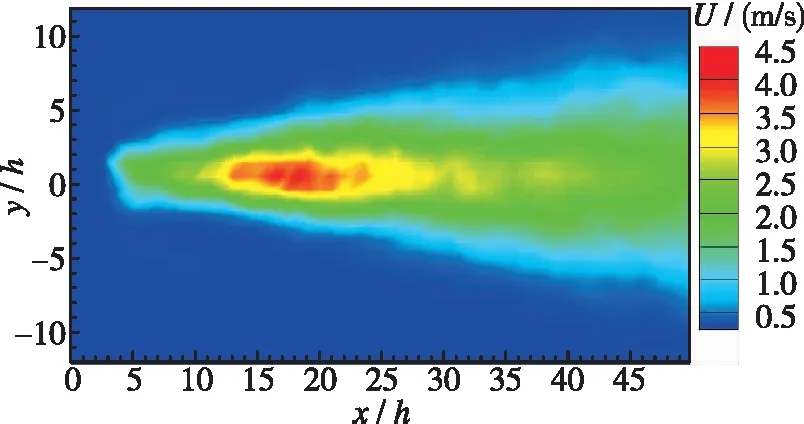
(e) Actuator setted in high-speed jet(9∶16)
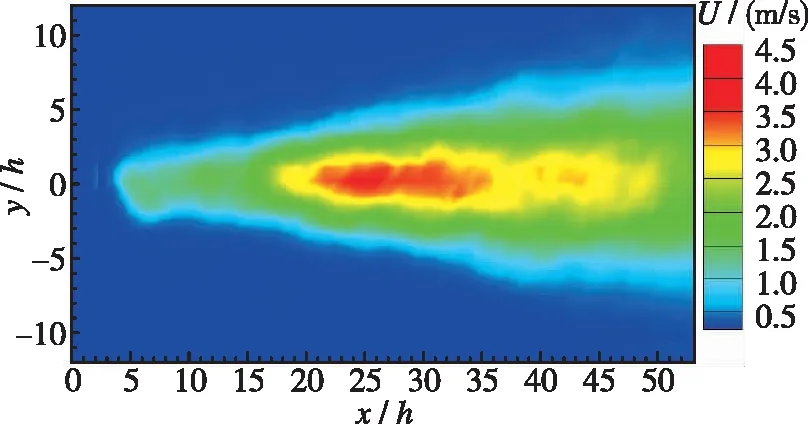
(f) Plasma off (9∶25)
(g) Actuator setted in low-speed jet(9∶25)
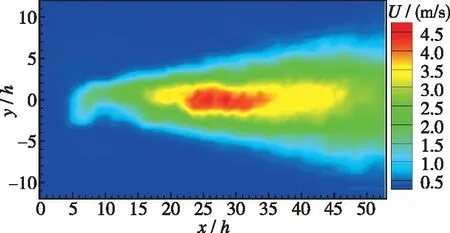
(h) Actuator setted in high-speed jet(9∶25)图4 不同速度比下射流流场 Fig. 4 Jet flowfields for different velocity ratios
射流宽度特性是射流基本特性之一, 能够直观反映出射流形态变化. 采用射流中心线速度一半处总宽度 (full width at half maximum, FWHM) 对不同参数下射流宽度特性进行表征. 图5所示为3种实验条件下, 等离子体激励器分别安装在低速、 高速射流通道中时射流宽度的增幅. 首先, 宽度增幅整体呈先持续增大, 到某个点 (x/h=35.0或40.0)时突然减小, 然后再次持续增大的变化趋势, 这应该是一个共性问题, 初步推测可能是周围气体的阻挡压缩作用造成的, 还有待于进一步分析.
其次, 在x/h=10.0处, 宽度增幅出现两个量级, 即对于1∶1的情况达到0.5 mm, 其他情况相对较小, 约0.1~0.2 mm, 这是因为1∶1时射流速度最小, 等离子体的控制效果达到最强. 在其他位置处, 1∶1的射流宽度增幅均为最大, 9∶16和9∶25两种情况下等离子体作用于低速射流时比高速射流时的宽度增幅更大, 这两个现象同样是由上述原因导致的, 说明等离子体激励器安装在低速射流中控制效果更好.
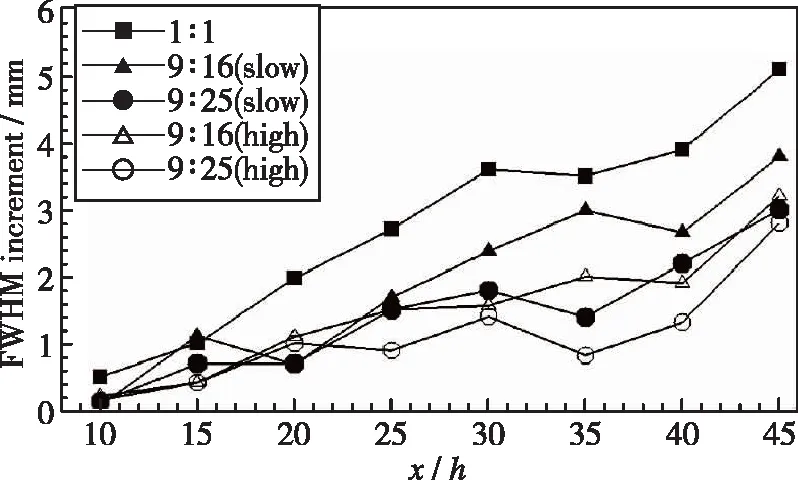
图5 不同激励器安装位置下射流宽度增量Fig. 5 Increment of jet FWHM with different actuator installation locations
2.1 双股矩形射流相似性
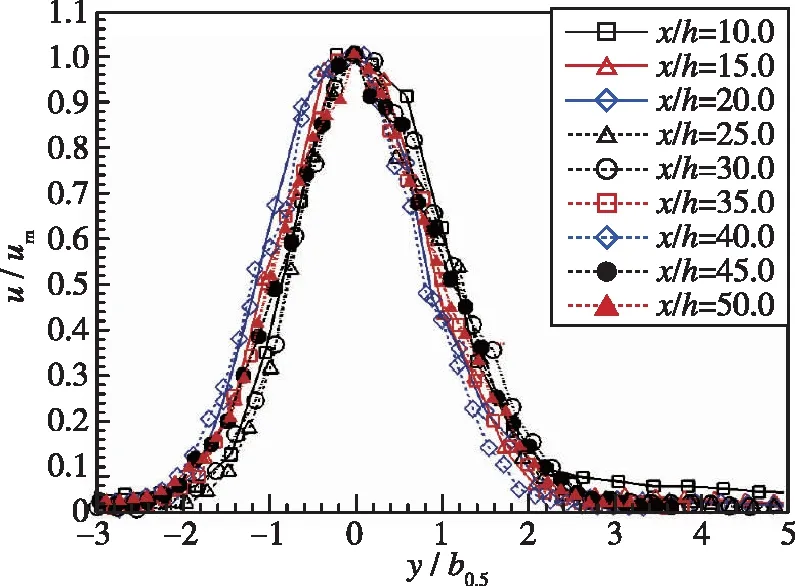
单股矩形射流的纵向流速分布沿高度方向存在相似性, 即自保性[33]. 这里针对双股矩形射流进行分析, 以某一纵向截面的最大射流速度um、 流速等于0.5um处的y坐标值b0.5分别对射流速度和y进行无量纲化处理, 为方便起见, 以最大速度um所处位置为y=0, 结果如图6所示.
从图6(a)、 (b)中可以看到, 双股矩形射流不同截面上的速度剖面重合良好, 表现出了良好的相似性. 射流速度相差越大, 相似性越强. 当速度比为1∶1时, 速度剖面呈现出3条重合线,x/h=10.0, 25.0, 30.0, 45.0为第1条,x/h=15.0, 35.0, 50.0为第2条,x/h=20.0, 40.0为第3条, 因此沿着横轴方向剖面曲线逐渐向外膨胀, 表现出一种波动性, 从x/h=10.0 开始先向外膨胀,x/h=20.0 达到最大, 然后从x/h=25.0, 45.0处分别出现第2、 3轮膨胀.
(a) Plasma off (1∶1)
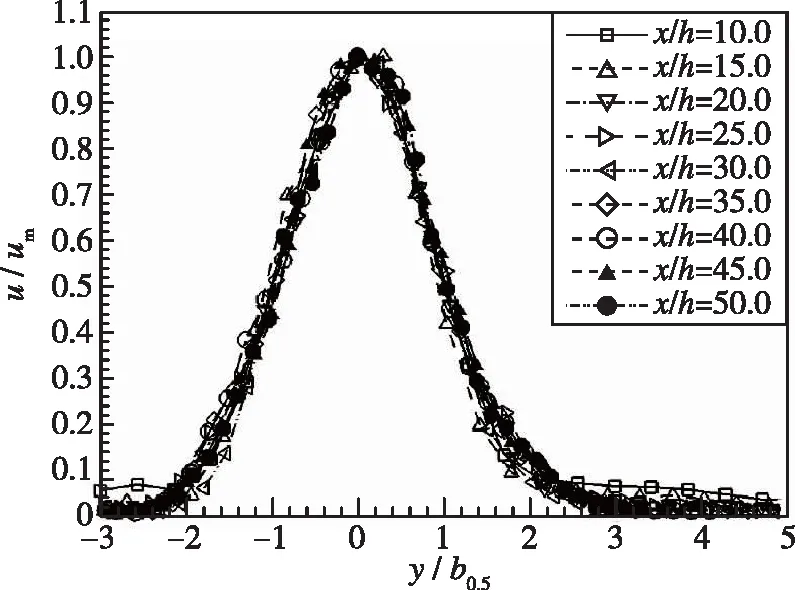
(b) Plasma off (9∶25)
(c) Plasma on (9∶25)
(d) x/h=30.0图6 不同双股矩形射流的截面速度分布Fig. 6 Velocity profiles of cross section for different two-rectangle jets
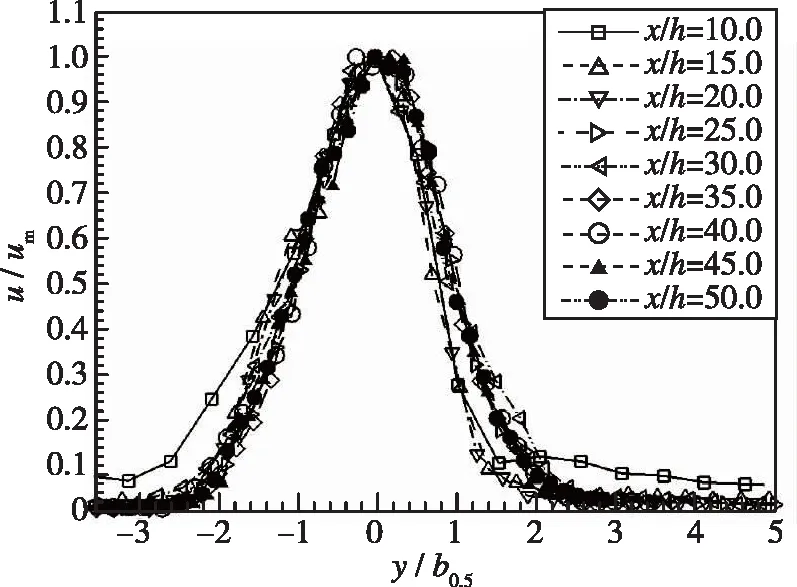
当速度比为9∶25时, 不同截面处的速度剖面重合得非常好, 表明其相似性很好, 几乎和单股矩形射流没有区别. 实际上, 当速度比为9∶16时, 双股射流的相似性也非常好. 需要注意的是, 当射流速度不同时, 在|y/b0.5|>2.0时,x/h=10.0处的速度增大, 且随着速度差的增大而更加明显.
上述结果表明随着速度差的增大, 双股矩形射流更加接近单股矩形射流, 原因可能在于当两股射流速度相差较大时, 其中速度较大射流为主射流, 表现出较强的引射能力, 导致另一股射流很快被融合而成为单股射流, 这一点可以从PIV拍摄的原始粒子图片中看到, 低速射流迹线向高速射流明显倾斜, 这一存在轻微撞击角度的射流交汇过程会增大射流湍流度, 进而使得x/h=10.0处射流外缘速度增大; 这里使用中心线Reynolds数表征湍流强度, Reynolds数越大湍流发展越充分, 图7所示为不同射流速度比下, 开启等离子体控制前后射流中心线Reynolds数及增量变化情况. 从图7(a)可以看到, 当关闭等离子体时, 随着射流速度差增大,x/h=10.0处的Reynolds数逐渐增大, 证明前面湍流度增大的结论.
而当两股射流速度相差较小时, 二者能量水平相近, 不能通过主射流的引射作用将二者快速融合, 同样从PIV原始粒子图片中看到两股射流的迹线基本平行, 主要依赖射流产生的涡街进行融合, 但这种融合方式还不能解释速度剖面的波动性, 因为速度比9∶25时也存在涡街. 为此, 如果将图6(a)中的红色、 蓝色曲线向右适当平移会发现所有剖面的重合度仍不如图6(b), 但已经有了明显改善, 说明不同截面上最大速度点围绕中心线波动, 这可能与两股射流各自产生的涡街之间的相干作用有关, 因为单股射流涡旋存在间歇现象, 即湍流-层流交替出现, 并且在射流边界附近更加明显[33], 那么对于 1∶1 的双股射流而言, 其两股射流的涡旋各自独立发展, 并不能保持同步, 但相互之间存在诱导作用, 由此可能导致最大速度点在两股射流中轮流出现, 即围绕中心线上下波动, 在一定程度上说明了前面速度剖面出现波动性的原因.
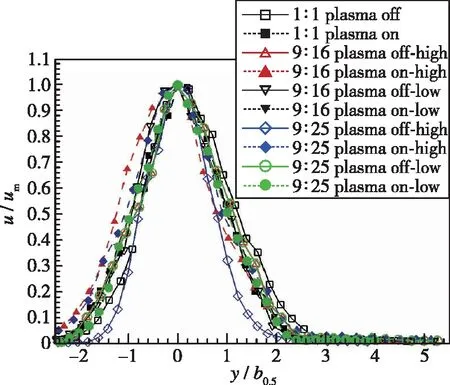
图6(c)所示为速度比9∶25的矩形射流施加等离子体控制后不同截面上的无量纲速度剖面, 等离子体主要改变了x/h=10.0处的速度分布, 增大了射流外缘速度, 这可能是由于等离子体扰动增大了射流湍流度, 能量交换更加充分, 使得速度剖面更加饱满; 当x/h>10.0后其他各截面则重合较好, 且外缘速度降低, 更接近于等离子体情况 (见图6(b)). 等离子体的作用之一是诱发扰动, 增大射流湍流度, 从图7(b)中可以看到, 等离子体均增大了射流Reynolds数, 说明湍流度增大, 尤其是初始阶段最为明显, 不过增幅快速减小, 这表明等离子体的控制效果主要体现在出口附近, 可以说等离子体主要改变了射流发生器的出口条件, 从Reynolds数相等的角度看它相当于加速了射流发展过程, 缩短了发展距离, 这对于缩短姿轨控火箭发动机燃烧室长度是有利的. 同时需要注意一点, 随着射流速度差的增大, 等离子体增大Reynolds数、 增强湍流的效果减弱, 原因在于此时原始湍流度就比较强, 等离子体诱导的干扰强度则是一定的, 从而导致控制效果减弱.

(a) Reynolds number

(b) Reynolds number increment图7 射流Reynolds数及其增量Fig. 7 Reynolds number of jet and its increment
2.2 双股矩形射流掺混性能
对于双组元姿轨控液体火箭发动机而言, 希望燃料与氧化剂在喷入燃烧室后能够尽快掺混, 两股射流的碰撞混合点、 混合角对掺混效率有重要影响.
定义混合点为两股射流开始交汇的位置. 射流流动过程中, 由于射流本身流动状态受射流湍动性影响, 混合点位置随时间稍有变化, 为减小混合点位置误差, 需要采用PIV技术测量计算后得平均实验流场进行混合点位置确定. 在流场稳定的假设条件下, 实验时首先在射流发生器上通道射流中加入示踪粒子进行显示测量, 而后在发生器下通道中加入示踪粒子进行显示测量[11], 对两张流动显示图片进行叠加, 两流场显示流动区域开始相交处即为混合点位置. 混合点距离射流发生器出口较远时, 双股射流保持自身流动状态较长时间后才能进行混合并形成新的射流. 混合点距离射流发生器出口较近时, 两股射流从出口流出短暂距离后开始混合. 混合点与射流发生器之间距离越小, 射流混合开始时间越早, 完成混合用时越短.
图8所示为不同射流速度比下混合点位置变化. 关闭等离子体激励器, 射流速度为1∶1时, 混合点位置距离射流发生器出口最远, 随着射流速度差的增大, 混合点位置前移, 接近射流发生器出口, 最大前移幅度达到34.7%, 如前所述, 这是因为速度差越大, 高速射流的引射作用导致低速射流向高速射流方向倾斜, 从而使得混合点位置前移. 开启等离子体激励器后, 射流速度比为1∶1时, 混合点位置变化最大, 前移幅度达到30%, 并随着射流速度比增大, 混合点位置变化量持续减少. 同时可以看到, 等离子体激励器安装在低速射流中比高速射流中混合点前移量更大. 总的来说, 两股射流的速度差较小时, 且等离子体激励器安装在低速射流中时, 其控制效果最好.
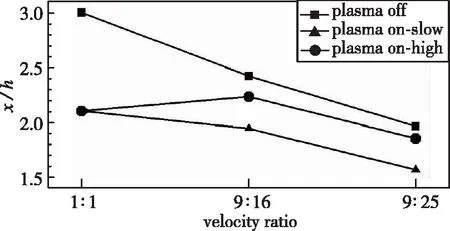
图8 混合点位置变化Fig. 8 Mixing point locations of two jets
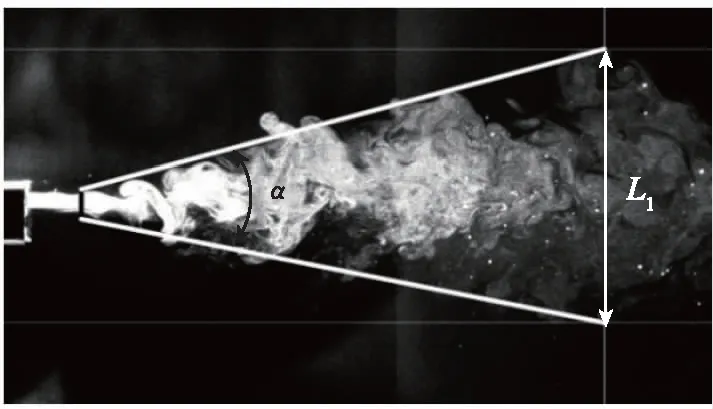
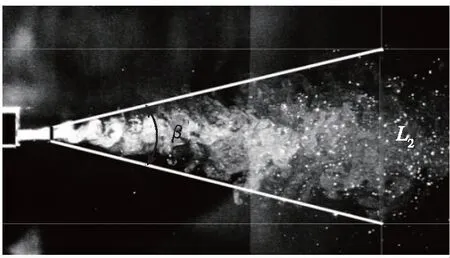
受实验设备限制, 无法对双股射流的掺混效果进行直接测量, 为能够直观显示等离子体对双股射流掺混效果的影响, 分别对双股射流形成角度进行测量. 定义双股射流重合角度为混合角; 沿射流中线位置处两股射流重合宽度与射流总宽度之比为混合率. 通过混合角以及混合率对双股射流的掺混效果进行量化.
对射流角度进行提取时, 首先分别确定两股射流流动中的最大射流宽度, 定义射流最大宽度的边界点与射流混合点连线所成夹角为射流角度, 两连线之间的距离为射流宽度, 如图9所示,α和L1为上通道射流角度与宽度,β和L2为下方射流角度与宽度,θ和L3为射流混合角与重叠宽度. 利用提取到的射流宽度, 即可得到沿中心线射流混合率η为
式中,xm为射流混合点位置.
(a) Jet from upper flow path
(b) Jet from lower flow path
前面的论述表明, 等离子体激励器应安装在低速射流中, 为此混合角和混合率的实验均针对此情况. 图10所示为混合角与混合率随射流速度比变化情况. 从图10(a)可以看到, 关闭等离子体激励器时, 混合角随速度差增加而增大, 说明速度差有力增强了两股射流之间的掺混, 与前面的分析一致. 开启等离子体激励器后, 混合角显著增大, 但是随速度差增加混合角增加量反而下降, 使得整体上混合角随速度差呈下降趋势, 增幅分别为10.5°, 7.0°, 4.4°. 同时从图10(b)可以看到, 随着射流的发展, 混合率逐渐增大, 说明掺混效果越来越好, 且没有施加等离子体控制时射流速度差越大, 混合率越高. 但是, 开启等离子体激励器后, 3种情况下的混合率非常接近, 经过比较, 发现混合角的影响居于主导地位, 混合点的影响比较微弱, 因此控制重点在于增大混合角.
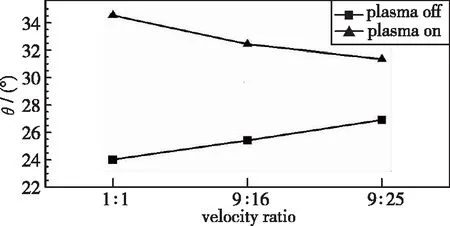
(a) Mixing angle
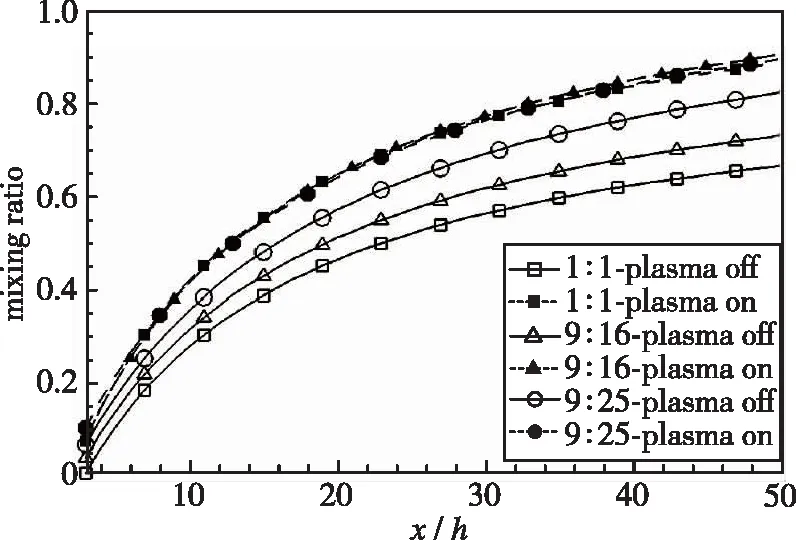
(b) Mixing ratio图10 等离子体对混合角和混合率的影响Fig. 10 Effect of plasma on mixing angle and ratio
2.3 双股矩形射流涡量变化
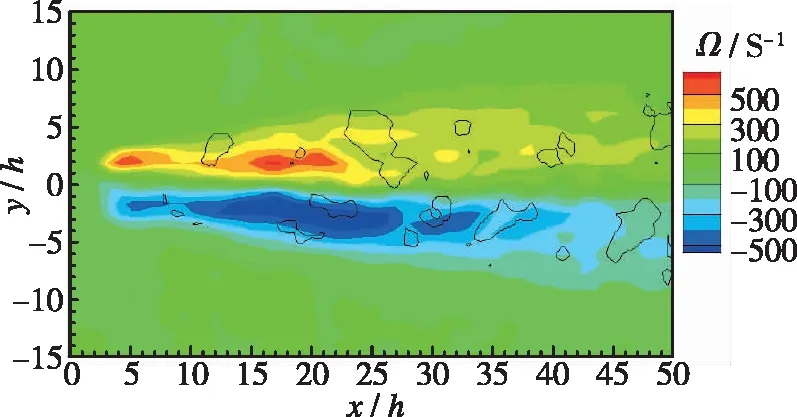
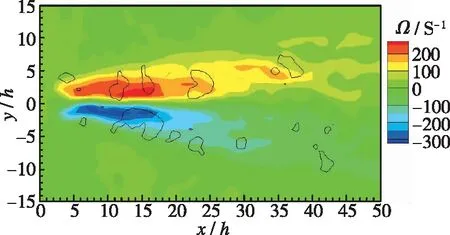
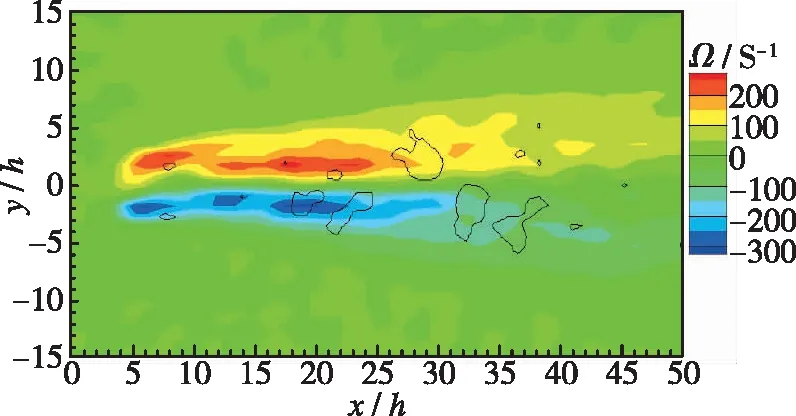
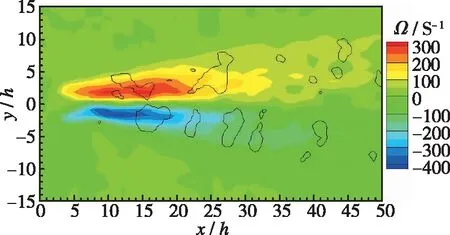
等离子体在射流发生器通道内产生一个扰动, 该扰动形成一个虚拟凸起, 改变了通道的实际截面积, 可能诱导出涡, 进而对射流湍流度造成影响, 图11所示为不同射流速度比下涡量(Ω)与Q准则分布图, 其中云图为涡量, 曲线为Q准则等值线. 为更精准判断射流中旋涡运动状态, 并与涡量场结合分析, 本文采用0.005为Q准则的阈值, 将旋涡运动较剧烈区域叠加显示在涡量场变化中[34].
(a) Plasma off (1∶1)
(b) Plasma on (1∶1)

(c) Plasma off (9∶16)

(d) Plasma on (9∶16)
(e) Plasma off (9∶25)
(f) Plasma on (9∶25)图11 不同射流速度比下涡量与Q准则示意图Fig. 11 Vorticity and Q criterion for different two-rectangle jets
没有施加等离子体控制时, 随着速度差增大, 涡量最大值呈现明显减小趋势, 如果以发生器中心线为界, 分别对上、 下两个区域的所有数据点进行简单求和, 可以发现正值涡量和(上区)分别降低 48.9% 和 62.1%, 负值涡量和(下区)分别降低50.2% 和61.2%, 由于存在实验误差, 上述值并非完全准确, 这里仅给出与图11相对应的结果. 涡量的大小反映了流体微团的旋转速度, 表明了剪切应力的作用效果, 可以说涡量越小, 流体内部速度差越小, 剪切应力越小, 也就说明速度分布更加均匀, 这正如前所述, 增大速度差可以增大混合率(见图10).
施加等离子体激励后, 1∶1射流的涡量最大值、 涡量和均出现大幅下降, 而对于其他两种射流则出现略微增大, 其中涡量和增幅约2%~17%. 前者说明等离子体增强了掺混效果, 后者则可能是实验误差造成的. 将3种射流施加控制后的涡量和进行统一比较, 发现涡量和的正、 负值均比较接近, 差距分别约8%, 12%, 说明此时3种射流的速度均匀度比较接近, 也即混合率比较接近, 这与上文图10的结果类似. 等离子体主要影响高涡量值区域, 使之范围扩大, 一定程度上更加靠近出口位置.
Q准则主要用于识别流场中旋涡主导运动区域. 射流速度比为1∶1时, 等离子体使得旋涡区向上、 下外围扩展, 同时更加靠近出口区; 射流速度比为9∶16时, 等离子体使得多个小面积旋涡区合并成为一个较大面积旋涡区; 射流速度比为9∶25时, 等离子体作用下, 旋涡区面积增大, 数量增多. 总体来讲, 等离子体对旋涡区的影响还不够清晰, 需要进一步探索.
3 结论
采用等离子体流动控制技术来增强姿轨控液体火箭发动机推进剂的掺混性能, 提高发动机燃烧性能, 针对这一目标, 设计了双股矩形射流发生器来模拟同轴式双组元喷嘴, 研究等离子体对射流流动的影响, 主要结论如下:
(1)双股矩形射流具有良好的相似性. 射流速度相差越大, 相似性越强, 表明随着速度差的增大, 双股矩形射流更加接近单股矩形射流, 原因可能是高速射流的引射导致低速射流被快速融合. 同时, 低速射流向高速射流倾斜并撞击, 增大了总射流的Reynolds数和湍流度, 导致总射流外缘速度增大. 等离子体对射流相似性的影响较弱, 主要增大了发生器出口附近的速度, 缩短了射流发展距离, 并且随着射流速度差的增大, 等离子体控制效果降低. 等离子体缩短了射流核心区长度, 增大了射流宽度, 且随着距离出口越远, 增幅越大.
(2)给出了混合点、 混合角和混合率的定义, 定量研究了等离子体对上述3个参数的影响. 没有施加等离子体控制时, 随着射流速度差的增大, 混合点逐渐靠近射流发生器出口, 混合角增大. 施加等离子体控制后, 混合点位置移向发生器出口, 混合角增大, 且两股射流的速度差越小, 或者等离子体激励器安装在低速射流中时其控制效果增强. 总的来说, 混合角比混合点对混合率的影响更大, 应更侧重于增大混合角.
(3)涡量在一定程度上反映了射流速度分布的均匀性和混合水平. 没有施加等离子体控制时, 随着速度差的增大, 涡量最大值减小, 表明混合率增大. 施加等离子体激励后, 涡量出现增大、 减小两种趋势, 但3种射流涡量和的正、 负值均比较接近, 表明混合率比较接近. 等离子体主要影响高涡量值区域, 使之范围扩大, 一定程度上更加靠近出口位置. 等离子体对射流中旋涡区的影响还不够清晰, 需要进一步研究.
致谢本项研究工作得到了国家自然科学基金(51777214)的支持.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
兵器装备工程学报(2021年10期)2021-11-08
空间科学学报(2021年6期)2021-03-09
中国农村水利水电(2021年2期)2021-03-05
南水北调与水利科技(2018年2期)2018-07-05
能源研究与信息(2018年1期)2018-05-08
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年2期)2017-11-24
