共址干扰对机载卫星导航接收机影响的研究
2021-02-28 07:27:12西南电子技术研究所李禹柯
电子世界 2021年23期
西南电子技术研究所 李禹柯
由于在有限的尺寸下搭载了大量的射频发射机,飞行器平台上的全球卫星导航系统(GNSS)接收机极易受到本机航电设备的干扰。为了分析机载卫星导航系统的共址干扰情况,本文首先建立了卫星导航接收机的干扰模型,然后分析了本机干扰源对机载卫星导航接收机的干扰机理,并以此评估了卫星导航接收机受干扰后的性能。通过SIMULINK实现了卫星导航接收机干扰模型的信号级仿真,仿真结果显示了本文中干扰模型和分析结果的正确性,也为飞行器平台射频兼容设计提供了依据。
全球卫星导航系统(GNSS)是机载导航系统中极为重要的一环。由于GNSS的导航卫星处于近同步轨道,其发出的信号到达地面时已经极其微弱,非常容易受到有意和无意干扰的影响。目前已经有大量文献对卫星导航接收机受到射频干扰的影响进行了分析,已有的文献对卫导接收机抗干扰性能的研究主要集中在对外部有源干扰的分析,而对同平台上辐射源产生的共址干扰问题缺乏深入的分析。
本文研究了同载具辐射源对卫星导航接收机的干扰影响。在本文中,首先建立了干扰源的两种耦合模型,然后讨论了干扰在捕获、跟踪、解码阶段的影响。为了验证分析结果,本文利用商业软件MATLAB的SIMULINK工具搭建卫星导航接收机,并注入干扰进行仿真。
1 干扰分析
1.1 干扰源分析
卫星导航接收机受到本平台的干扰主要有两类:连续的宽带噪声干扰和脉冲干扰。
(1)连续的宽带噪声干扰
这类干扰的强度较低(仍然大于GNSS信号强度),但干扰将持续抬高卫星导航接收机的底噪,干扰类型为白噪声。对于卫星导航所在的频段,可以认为宽带噪声的平均功率不随频率而变化。
(2)单音脉冲信号干扰
这种干扰的强度很高(干信比大于50dB),但是每次干扰持续时间很短。脉冲发射机在卫星导航的频带内会产生一个到数个单频点杂散信号。
1.2 卫星导航接收机捕获算法抗干扰分析
GNSS信号捕获的算法是通过本地的伪随机序列和GNSS卫星信号携带的伪随机序列相乘后累加,当两个伪随机序列重叠时相关性最大,可以得到最大的累加值。通过合理设定门限,当累加值超过门限时认为捕获成功。具体的捕获算法可以参见文献。本文中采用基于FFT的快速捕获算法。
需要注意的是,当积分时间跨数据位时,如果两个数据位的值不同,则会导致积分结果反向,从而导致相抵消而影响累加结果。而捕获阶段卫星导航接收机并不能获取数据位的时间信息,所以一般而言捕获时的相关累加时间不长于半个数据位。因此,捕获一般要求比跟踪和解码更高的灵敏度。
1.3 卫星导航接收机跟踪算法抗干扰分析
(1)连续宽带噪声干扰下的卫导跟踪算法抗干扰分析
典型卫星导航接收机的跟踪算法部分包含了码环和锁相环两个环路。在两个环路构成的跟踪功能中实现了载波和码的剥离以及预检测积分。噪声(包含干扰产生的等效噪声)会导致载波环和码环的颤动,码环的准确测量依赖于载波环的正确锁定,而码环的震颤是GNSS系统测量误差的主要来源。当颤动的幅度超过一定门限时,将可能会导致环路脱锁。
(2)单音脉冲噪声干扰下的卫导跟踪算法抗干扰分析
按照连续宽带噪声干扰下的卫导跟踪算法抗干扰计算方法,同样可以求得对于连续的单音干扰。从增益调节因子的计算方法可以看出,当干扰频率对准主频时,天线接口处的干扰电平门限功率比宽带噪声高3dB即可能导致脱锁。但是对于脉冲干扰来说,即使干扰电平远大于上述门限,也有可能不会对锁定产生影响。
其原因有两点:
第一,设计良好的卫星导航接收机前端应当有保护电路的限幅器,限幅器可以钳位大功率信号。当脉冲干扰在统计特性上压倒了GNSS信号加随机噪声时,它会俘获GPS接收机前端,从而阻止数字信号处理过程。对于环路而言,这等效于减少了相干累积的时间,将等比例地降低环路的等效载噪比。
第二,当脉冲幅度高于脱锁门限,但又没有触发限幅器时,脉冲带来的影响将会被环路滤波器平均到整个时间轴上。通过反馈回路,环路滤波器可以在两次脉冲之间的时间平息脉冲带来的震颤,从而稳定环路。
但是,当脉冲周期与码环、锁相环的积分时间相近时,脉冲会频繁对载波环检测器和鉴相器的输出产生影响,此时环路滤波器无法消化频繁的脉冲干扰。
2 SIMULINK仿真
在本节的仿真中,假设白噪声噪底取-174dBm/Hz,接收机天线接口单元接收到得卫星信号为-133dBm,噪声系数为4dB,处理损耗为2dB,将上面的参数进行计算,可以计算得载噪比约为35dBHz。
基于SIMULINK的卫星导航接收机仿真架构如图1所示。

图1 基于SIMULINK的卫星导航接收机仿真架构
由于本文的目的是分析卫星导航接收机数字信号处理部分的抗干扰能力,所以本文的仿真仅包含基带部分。
本文中模拟的信号源采用了GPS的C/A码序列,导航电文按照伯努利分布随机生成。干扰源分别采用白噪声模拟器和一个脉冲模拟器模块生成。脉冲为一个脉冲宽度为0.5μs,脉冲间隔为1.5μs,脉冲个数为14个的脉冲串,此脉冲每2ms发射一次,脉冲占空比约为1%。
2.1 算例1
第一个算例为存在宽带噪声干扰时的仿真。设不存在干扰时,载噪比为35dBHz。当存在干扰信号且干信比分别为27dB、31.5dB、34.5dB、37.5dB时,对应的载噪比分别为32.5dBHz、30dBHz、27.5dBHz和25dBHz。此时,卫星导航接收机锁相环和码环的仿真结果由图2给出。
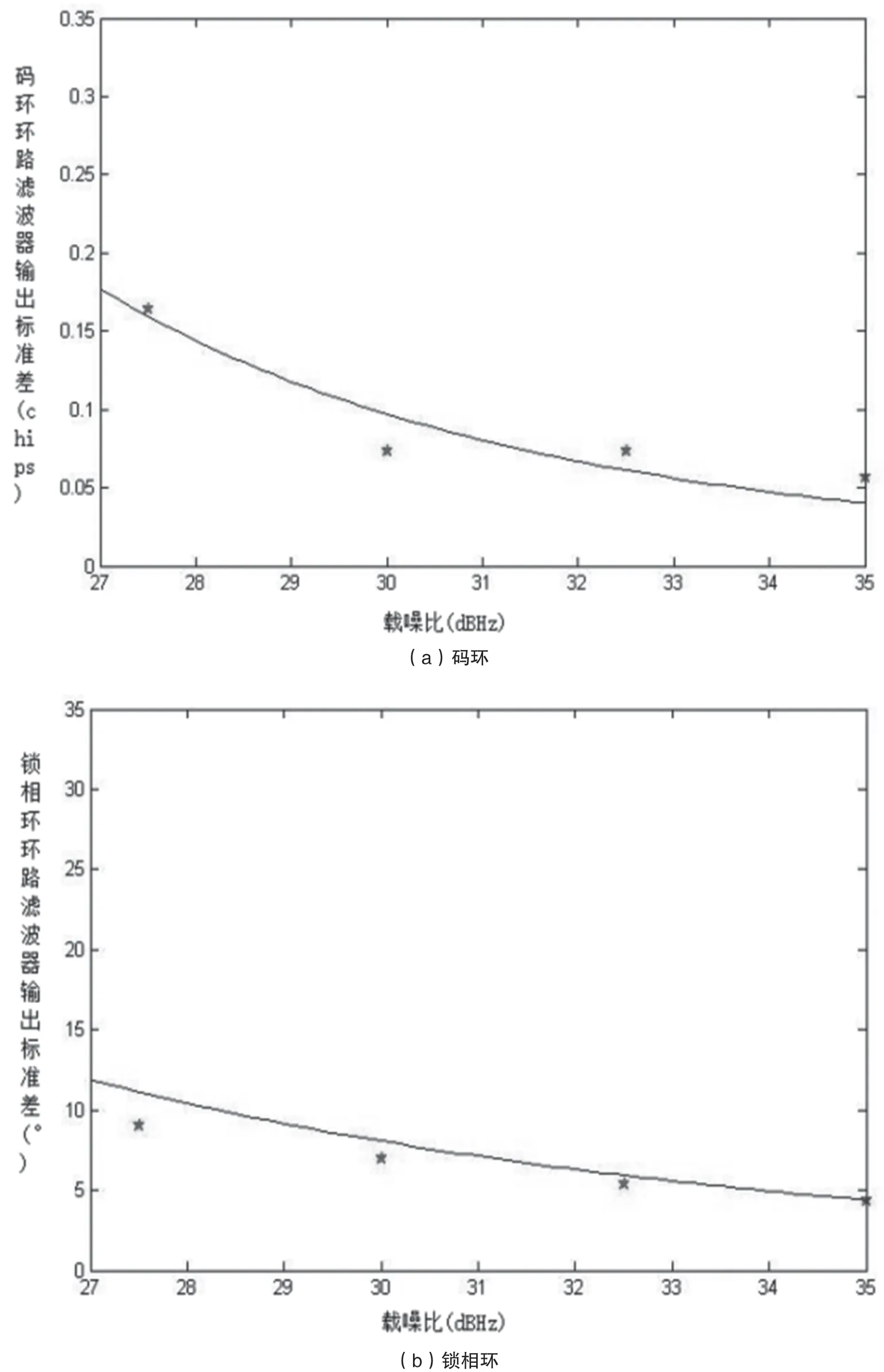
图2 存在宽带噪声干扰时的码环和锁相环滤波器输出偏移量
图2 中,点代表对应载噪比的仿真结果,实线为理论结算值。可以看出,仿真结果和理论计算值相吻合。当干信比增加时,码环和锁相环的误差偏移量也随之增加,并趋近于脱锁门限。当干信比达到40dB时,码环和锁相环将无法维持锁定状态,即卫导接收机受到干扰而失效。
2.2 算例2
第二个算例为存在脉冲干扰时的仿真,一个典型的航电系统脉冲干扰信号为一系列宽度为0.45μs,脉冲间隔1.5μs的脉冲,一次共发射14个脉冲,总长度为25.8μs,每秒发射500次。脉冲干扰包络的图像如图3所示。
图3 脉冲干扰包络示意图
图3 中横轴为时间,纵轴为归一化的脉冲场强。这里计算了干信比分别为40dB、60dB和80dB情况下对卫星导航的干扰情况。表1中给出了码环和锁相环的标准差,可以看出在干信比为40dB的脉冲干扰下码环和锁相环的标准差并没有明显恶化。当脉冲干扰增加到60dB时,虽然码环的锁定状态仍然良好,但是锁相环的标准差已经接近了脱锁的极限,此时在20s内的误码率依然为0;而干信比达到80dB时,锁相环和码环均已脱锁。
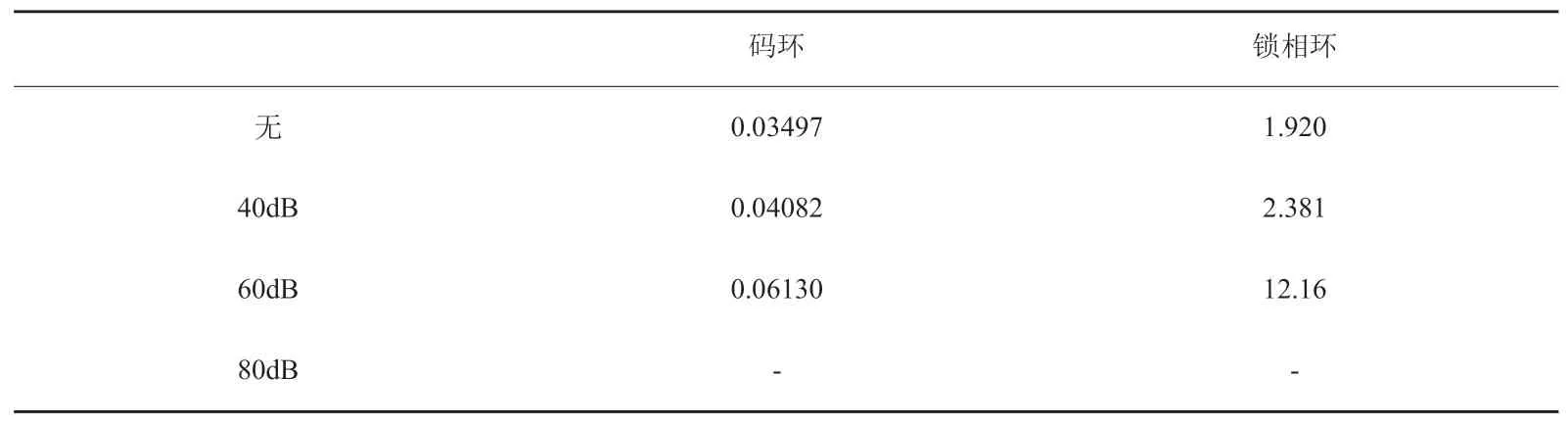
表1 码环和锁相环滤波器的输出偏移量标准差
将干扰脉冲的参数代入相关公式,可以计算得到干信比J / S的门限约为63dB。这与表1中的仿真结果吻合。
结论:本文理论分析了航电设备共址干扰中常见的两种干扰形式对卫星导航的影响。从文中分析可以看出,码环和锁相环的稳定是保证接收机正常工作的关键性条件。对于持续性的宽带噪声干扰,由于扩频处理产生的增益,卫导接收机可以抵抗强于信号功率40dB的干扰,这取决于卫导接收机的扩频码选择;而对于本机航电设备的典型脉冲干扰,可以抵抗高于信号功率约60dB或者70dB的干扰,同样取决于卫导接收机的扩频码选择。SIMULINK仿真的结果验证了分析的正确性,证明本文的分析结果可以用于实际机载卫星导航抗共址干扰特性分析。
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子测试(2018年14期)2018-09-26 06:04:00
上海公路(2018年4期)2018-03-21 05:57:46
电测与仪表(2017年24期)2017-12-19 05:15:22
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
电测与仪表(2015年9期)2015-04-09 11:59:28
电测与仪表(2014年8期)2014-04-04 09:19:36
现代防御技术(2014年6期)2014-02-28 18:26:27