国产“鸿鹄”膝关节置换手术机器人的早期临床研究
2021-02-27 02:16:56夏润之童志成张经纬翟赞京李慧武
实用骨科杂志 2021年2期
夏润之,童志成,张经纬,翟赞京,李慧武
(上海交通大学医学院附属第九人民医院骨科,上海 200011)
虽然有数种保守治疗和手术治疗方式,但全膝关节置换术(total knee arthroplasty,TKA)一直被认为是治疗终末期膝关节骨关节炎的最佳方式[1-2]。大量文献报道认为术后膝关节内翻或外翻范围控制在3°以内时可以获得术后优良的长期效果[3-4]。目前实现冠状面下肢对线的最传统方法是使用股骨髓内和胫骨髓外引导器。但即使使用这种方法术者也不一定能实现最佳的下肢对线,从而导致膝关节内外翻异常值和相关并发症[5],并且常规膝关节置换手术对医者技术要求极高,操作在很大程度上依赖于术者经验和即时发挥,难以做到手术效果标准化和可重复化。而通过关节手术机器人的辅助则有望克服关节置换的人为不确定性,尽可能实现手术效果的一致性[6-9]。
从20世纪90年代起国际上就已开始关节置换手术机器人的研发,在经历了早期的Robodoc、Caspar、Acrobot等主、被动机器人的探索和实践后,目前主流机器人为半主动式手术机器人,其中最具代表性的是美国史赛克公司开发的MAKO手术机器人[10],基于患者术前CT影像信息,术者通过机器人手臂完成截骨研磨和假体置入而无需传统手术中的截骨模块和试模工具。MAKO手术机器人已被美国食品药品管理局(food and drug administration,FDA)批准用于单髁、全膝置换,临床证据证明其显著提高了手术的精确度。但目前关节置换手术机器人的核心技术仅由少数国外公司掌握,造成了技术上的垄断。因此,研发自主知识产权的关节置换手术机器人,打破境外垄断,是弥补我国现有不足,助力关节置换手术向着手术效果均优方向前行的重要举措。
我们团队以微创环境下的安全、高效、精准为目标,研发了具有自主知识产权的半主动、轻便型“鸿鹄”膝关节置换手术机器人系统,该系统具备全方位动态跟踪、轻量化、高精度的灵巧构型设计以及边界控制等特性。本研究旨在评估该系统的早期临床截骨和假体摆位精度,为临床使用提供实验依据,最终完成手术系统与手术环境的集成。
1 资料与方法
1.1 一般资料 对2020年6月至2020年9月在上海交通大学医学院附属第九人民医院骨科接受“鸿鹄”关节置换手术机器人辅助下TKA治疗的5例患者临床资料进行回顾性分析。受试者必须符合下列所有纳入标准:(1)膝关节内侧或外侧间室骨关节炎,引起疼痛或产生功能障碍且经规范保守治疗无效;(2)年龄40~80岁;(3)身体质量指数(body mass index,BMI)≤35 kg/m2;(4)膝关节内翻畸形≤15°且固定性屈曲挛缩畸形≤15°;(5)术侧膝关节既往未接受过手术治疗;(6)膝关节前交叉韧带功能状态良好;(7)无局部或全身感染征象。排除标准:(1)患侧膝关节曾经进行过置换术的受试者;(2)固定性屈曲挛缩或内翻畸形>15°;(3)受试者由于疾病(如肿瘤、重度骨质疏松、或者代谢性骨病等)导致无法支撑和/或固定假体;(4)不能理解参与研究的要求,或不能完成研究随访计划。
本项研究的手术方案经过伦理委员会审批通过,所有患者对手术知情同意。5例患者术前诊断均为膝关节骨关节炎,男2例,女3例;年龄64~76岁,平均(68.4±4.7)岁;BMI(27.1±3.3)kg/m2,均采用“鸿鹄”关节置换手术机器人系统和Microport全膝膝关节假体(Microport,中国)。
1.2 手术方法 患者术前根据“鸿鹄”手术机器人系统要求扫描全下肢CT获得术前CT影像。将CT影像导入手术计划系统后,影像数据以包括冠状面、矢状面、横断面的三视图的方式显示。对CT影像分割重建后,获得胫骨、股骨、腓骨骨头的三维模型。随后医生在3D模型上手动确定特征点的具体位置,其中分为股骨特征点、胫骨特征点,并由两个指定的点确定一条对应的特征线。确定的特征点主要用于在假体摆位阶段计算摆位所需信息。利用分割重建后的骨模型,选择合适的假体类型和尺寸,并通过调整假体的位置和姿态以获得恰当的内外旋、前后倾、内外翻角度以及内外侧截骨量(见图1~2)。
术中,患者全麻仰卧位躺在手术床上,使用下肢固定器固定小腿,然后将手术机械臂台车与导航控制台台车摆放在患者两侧,将导航控制台的NDI光学测量仪对准手术部位。机械臂安装无菌袋,并对患者手术区域进行消毒。然后对机械臂的靶标进行注册。再将股骨、胫骨靶标打入患者股骨与胫骨,随后打入股骨和胫骨标记钉以标记股骨、胫骨检查点坐标,方便以后随时检查骨头靶标是否发生偏移。以股骨头为旋转中心旋转股骨,计算髋关节中心坐标,并用钝头靶标探针点击“踝内侧”和“踝外侧”以便后期计算踝关节中心坐标。取膝前内侧纵切口,经髌旁内侧进入膝关节,暴露手术区域后,术者根据控制台显示器的指示使用尖头靶标探针在股骨与胫骨表面点取点云,获取骨头靶标坐标系与控制台CT数据坐标系之间的转换矩阵。截骨前可再一次利用分割重建后的骨模型,选择合适的植入物类型和尺寸,并通过调整植入物的位置和姿态以获得恰当的内外旋、前后倾、内外翻角度,以及内外侧截骨量。术中怀疑股骨、胫骨靶标,机械臂基座发生偏移时,可随时使用尖头靶标探针进行检验。根据手术计划,机械臂运行到指定的位置,机械臂末端截骨导块调整到合适的姿态,由高年资关节外科主任医师使用摆锯进行截骨。截骨后可使用截骨平面校验靶标评价股骨截骨和胫骨截骨后的截骨平面,包括股骨5平面和胫骨1个平面。所有平面截骨完成后采用常规方法进行假体试模,取出试模后脉冲枪冲洗创面,骨面干燥后以骨水泥安装Microport全膝关节假体,待骨水泥固化后再次在膝关节外翻应力状态下评估软组织平衡情况,然后取出股骨、胫骨上的骨靶标和标记钉并关闭手术切口完成手术。

图1 “鸿鹄”手术机器人术前计划股骨假体摆位 图2 “鸿鹄”手术机器人术前计划胫骨假体摆位
1.3 术后处理 术后8h开始给予低分子肝素皮下注射预防深静脉血栓形成,术后24 h内常规给予预防性抗生素治疗;术后2d根据患者的恢复情况嘱其开始进行下地负重行走锻炼,同时进行非负重状态下的主动和被动膝关节屈伸活动锻炼。观察有无手术部位感染、深静脉血栓形成、血管神经损伤等并发症。
1.4 评价指标 记录术前规划中的股骨远端、股骨后髁、胫骨平台内外侧截骨量。记录术后股骨远端、股骨后髁、胫骨平台内外侧软骨厚度。记录术后股骨远端、股骨后髁、胫骨平台内外侧实际截骨量。预期截骨量=规划截骨量+软骨厚度-锯片振幅,实际截骨量与预期截骨量的差异可作为截骨误差的判断标准。将股骨头中心与膝关节中心的连线定义为股骨机械轴,将膝关节中心与踝关节中心的连线定义为胫骨机械轴,随后在冠状面上,将股骨机械轴与胫骨机械轴在膝关节内侧的夹角定义为下肢力线(hip knee ankle,HKA)角度。在冠状面上,将股骨机械轴与股骨假体远端切线在内侧的夹角定义为股骨假体冠状角。在冠状面上,将胫骨机械轴与胫骨假体近端切线在内侧的夹角定义为胫骨假体冠状角。记录术前规划HKA角度,术前规划股骨假体冠状角和术前规划胫骨假体冠状角。所有患者在术前常规进行标准双下肢正位全长X线检查,以此来测量患侧膝关节的内外翻畸形角度。术后1周拍摄双下肢正位全长X线片测量术后患侧下肢HKA角度,并测量术后股骨假体冠状角和胫骨假体冠状角,与术前规划的假体位置目标值进行比较,评估冠状位上假体的植入位置以及手术方案实施的精确性。X线片影像学角度测量利用计算机软件(PACS系统)由2位未参与手术的医生分别独立手动完成,以2位测量者所测数值的平均值作为最终测量结果。
2 结 果
5例患者手术过程均顺利,术前计划及手术时间共用时(159±11)min。我们统计了目前5例临床患者的术前规划截骨量、术后测量的实际截骨量、术后测量的软骨厚度(见表1)。预期截骨量=规划截骨量+软骨厚度-锯片振幅,术中锯片振幅均为1.5 mm。实际误差=实际截骨量-预期截骨量,代表了实际截骨量与预期截骨量的差异。绝对误差=实际误差的绝对值,可作为误差的判断标准。每位患者均统计股骨远端内外侧髁,股骨内外侧后髁和胫骨平台内外侧共6个绝对误差,5例患者共统计到30个绝对误差。73.3%的绝对误差在0~1 mm之间(22/30),16.7%的绝对误差在1~2 mm之间(5/30),6.7%的绝对误差在2~3 mm之间(2/30)。1例患者的胫骨平台外侧的绝对误差为3.1 mm。绝对误差的均值为(0.91±0.72)mm。实际截骨量和预期截骨量之间的检验结果t=-0.757,P=0.455,显示两组比较差异无统计学意义。
此外,我们还统计了术前规划HKA角度、术前规划股骨假体冠状角和术前规划胫骨假体冠状角,并由2位未参与手术的医生统计了5例患者术前、术后下肢全长片的HKA角度和术后股骨假体冠状角、术后胫骨假体冠状角,取平均值(见表2)。5例患者的术后HKA角度较术前均更加趋向180°。5例患者平均术后股骨假体冠状角为(90.46±2.12)°,5例患者的股骨假体内外翻角度均在3°以内。5例患者平均术后胫骨假体冠状角为(90.54±1.77)°,5例患者的胫骨假体内外翻角度均在3°以内。另外我们计算了术前规划角度与术后实际角度的差值,取该差值的绝对值作为手术机器人截骨的角度误差,HKA的角度误差均值为(0.60±0.39)°,股骨假体的角度误差均值为(0.60±0.21)°,胫骨假体的角度误差均值为(0.56±0.26)°,即各角度误差的均值不超过1°。
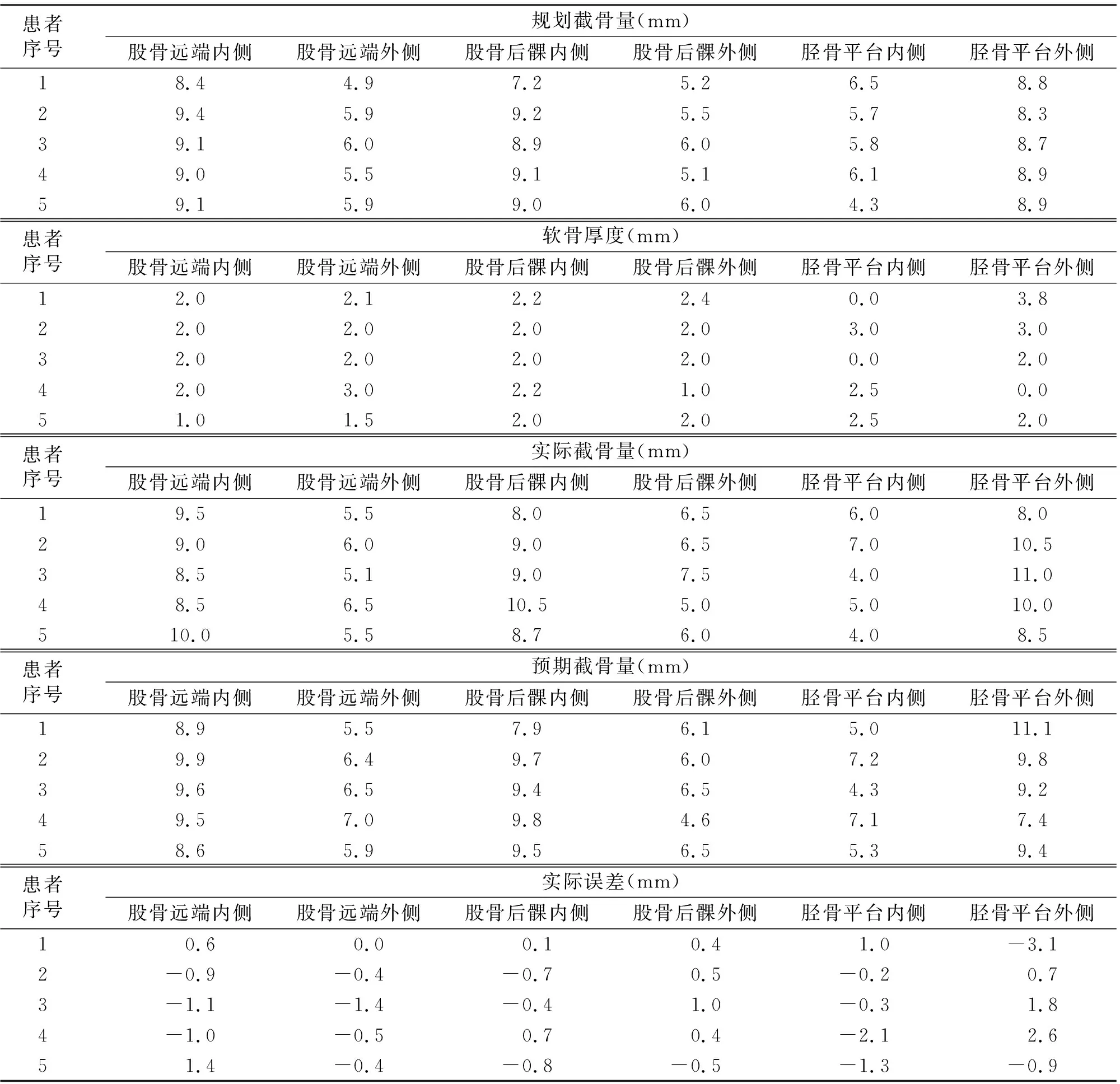
表1 5例患者膝关节置换各截骨量测量值
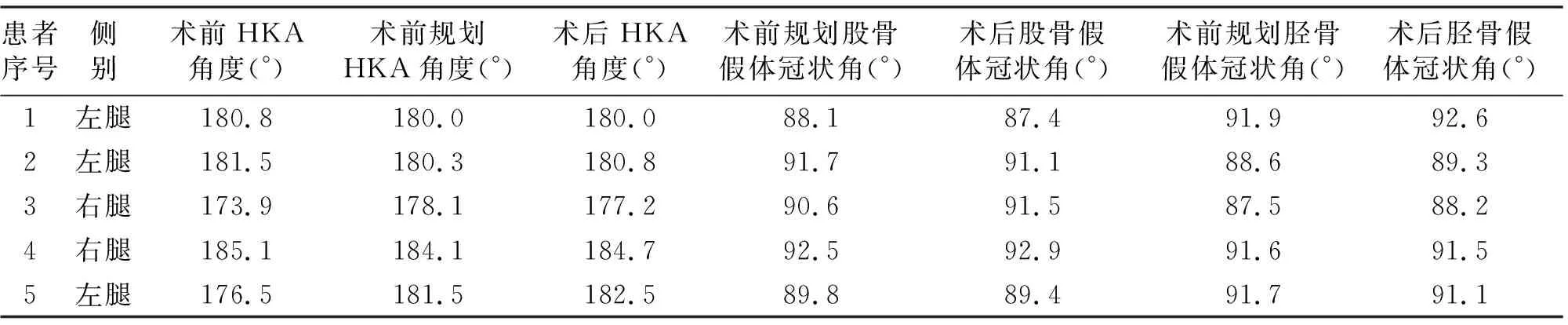
表2 TKA术前和术后下肢全长片角度测量值及术前规划角度值
5例患者手术过程均顺利,且术后均未观察到手术部位感染、深静脉血栓形成以及血管神经损伤等手术相关的并发症。
典型病例为一69岁女性患者,因“左膝关节疼痛3年”入院,有骨质疏松病史。入院后结合患者症状、体格检查、术前X线片诊断为左膝关节骨关节炎。在全麻下进行手术机器人辅助左膝全膝关节置换术,术中见左侧胫骨近端有明显骨质疏松表现,遂加用胫骨假体延长杆。术后1周的股骨假体和胫骨假体的内外翻不超过3°(见图3~4)。

图3 术后1周下肢力线较术前更趋向180°

图4 术后1周股骨与胫骨假体内外翻不超过3°
3 讨 论
近年来,机器人技术越来越多地渗透到骨科领域。骨骼解剖学的静态特性简化了术前成像,提高了术中计算机配准和导航的精确度,并且无需在手术环境中对动态变化的软组织三维结构使用高级感知响应算法。通过结合机器人与数字化手术技术,可以从根本上实现安全、精细、高精度的手术操作,骨科手术机器人中关节置换手术机器人呈快速发展势头。TKA手术机器人包括MAKO(MAKO Surgical Corp,Fort Lauderdale,FL,USA),Robodoc(Curexo Technology Corp,Fremont,CA,USA),Praxim(OMNIlife science,East Taunton,MA)和Navio(Smith&Nephew plc,Watford,England)等。此外,2019年一款新型半主动机器人辅助系统ROSA刚刚报道了其在尸体试验中的截骨效果[11]。目前使用最为广泛的半主动手术机器人是MAKO机器人。Schiraldi等[12]通过尸体试验发现相比于常规手术,MAKO辅助TKA可以做到膝关节屈曲0°~110°时膝关节内外侧压力更加平衡。随着手术机器人手术量的不断增加,其实现中立位对线的能力越来越被肯定。为了进一步确定手术机器人对膝关节严重内翻或外翻畸形的患者术后中立位对线效果,Marchand等[13]分析了术前膝关节极度内翻或外翻畸形的患者在接受MAKO辅助TKA后的下肢力线。严重内翻或外翻被定义为7°及7°以上,术前129例严重内翻,7例严重外翻。结果显示所有患者术后下肢力线都更趋向中立位,显示MAKO可以帮助术者实现术前计划好的中立对线。还有许多研究均表明机器人辅助下能够实现比传统术式更好的膝关节对线[14-15]。此外,机器人辅助技术已经被证明可以精确复位关节线以及实现优良的间隙平衡,进而使患者术后可以保持接近正常的膝关节运动模式[16-17]。这些优势使我们有理由相信机器人辅助手术可能会带来延长假体植入物寿命和改善患者预后等益处。在术后评分方面,Marchand等[18]进一步研究了MAKO组和常规TKA组术后6个月的西大略湖和麦克马斯特大学骨关节炎指数(western ontario and McMasteruniversities osteoarthritis index,WOMAC)。结果发现MAKO组的短期疼痛、物理功能和总满意度评分更佳。因此,接受MAKO辅助TKA的患者相比于常规手术可以期待更好的早期临床结果。同学习所有手术技巧一样,手术机器人辅助TKA同样需要学习曲线,但是手术机器人可以减少TKA的学习曲线。Kayani等[19]分析了机器人辅助TKA的学习曲线发现在完成7例手术后术者便可掌握这项技术。Sodhi等[20]发现尽管MAKO组的手术时间比常规手术更长,但MAKO组后期的手术时间几乎可以做到和常规手术一致。
“鸿鹄”手术机器人系统基于CT影像,尽管这需要更多的术前计划时间和术中配准时间,但它们可以提供更细节的3D骨骼模型以定义假体摆位,包括冠状面、矢状面和横断面的假体对线。术前术者可以根据患者解剖自定义假体摆位,然后术中借助机械臂高精度地执行该术前计划,而且通过手术机器人的机械臂提供截骨定位,避免了传统手术股骨髓内定位杆对股骨髓腔的破坏。从截骨误差来看,本研究73.3%的绝对误差在0~1 mm之间(22/30),16.7%的绝对误差在1~2 mm之间(5/30),6.7%的绝对误差在2~3 mm之间(2/30)。1例患者的胫骨平台外侧的绝对误差为3.1 mm,初步判断其主要由胫骨近端外侧骨注册误差导致,该绝对误差的实际误差为-3.1 mm,即实际截骨量小于预期截骨量,所以术中通过加截3 mm补足了截骨量。此外,绝对误差的均值为(0.91±0.72)mm。实际截骨量和预期截骨量之间的检验结果比较差异无统计学意义(P>0.05),说明实际截骨量和预期截骨量几乎吻合,显示该手术机器人的效果比较令人满意。从患者术后的下肢全长片来看,5例患者的术后HKA角度较术前均更加趋向180°。5例患者的平均术后股骨假体冠状角为(90.46±2.12)°,5例患者的股骨假体内外翻角度均在3°以内。5例患者的平均术后胫骨假体冠状角为(90.54±1.77)°,5例患者的胫骨假体内外翻角度均在3°以内。另外,从术前规划角度与术后实际角度的角度误差来看,HKA的角度误差均值为(0.60±0.39)°,股骨假体的角度误差均值为(0.60±0.21)°,胫骨假体的角度误差均值为(0.56±0.26)°,即各角度误差的均值不超过1°,显示本手术机器人能较好实现术前规划的假体摆位角度。本次早期临床研究中,在“鸿鹄”关节置换手术机器人的辅助下全膝关节置换术能够在微创条件下精准截骨实现符合术前规划的假体摆位及合适的软组织平衡,并且具有值得信赖的安全性,5例患者手术过程均顺利,且术后均未观察到手术相关并发症。
但本研究同时存在一些不足之处。首先,目前只完成了5例临床研究,患者例数尚少,需要更多的患者入组以探究“鸿鹄”手术机器人的截骨准确性。其次,我们目前的截骨对照组为术前规划值,尚未设置常规手术作为对照组,并且我们暂时未统计临床评分以评估假体的精确植入是否能够带来功能的改善,将通过进一步随访进行验证。总之,作为精准医疗的体现,“鸿鹄”手术机器人的远期临床效果能否带来膝关节功能的明显改善,还需要进一步的对照研究和长期随访。
猜你喜欢
疯狂英语·新读写(2023年5期)2023-06-02 02:05:02
疯狂英语·新读写(2023年1期)2023-04-06 01:26:32
基层中医药(2022年1期)2022-07-22 07:22:16
昆明医科大学学报(2022年1期)2022-02-28 07:44:12
中华肩肘外科电子杂志(2020年1期)2020-12-20 14:14:45
作文周刊·小学六年级版(2020年40期)2020-10-14 21:09:43
中华肩肘外科电子杂志(2020年1期)2020-08-24 07:03:44
公民与法治(2020年4期)2020-03-12 16:10:55
现代艺术(2019年10期)2019-09-10 09:46:17
东坡赤壁诗词(2018年1期)2018-03-31 09:10:10