
应用太阳法实现CTL-713C型天气雷达天线波束指向自动定标
2021-02-24 08:54陈士英王尔申张平贵王志伟王箫鹏
科学技术与工程 2021年1期
陈士英,王尔申,张平贵,王志伟,闫 平,王箫鹏
(1.内蒙古自治区大气探测技术保障中心,呼和浩特 010051;2.沈阳航空航天大学电子信息工程学院,沈阳 110136;3.中国气象局气象探测中心,北京 100081)
内蒙古地区目前共布设7部CTL-713C型中频相参多普勒天气雷达,约占到中国同型号雷达数量的1/5,未来雷达布设密度还将不断增加。雷达天线波束指向应与其对应方向的显示数据之间严格保持一致,才能保证雷达对气象目标进行准确的空间定位[1]。然而该型号雷达在天线波束指向定标功能方面存在着设计上的不足,雷达站初建时,可利用经纬仪和磁偏角进行天线方位角零度的标定,并采用重锤法标定天线俯仰角零度,当雷达天线罩安装后,便无法再对方位角零度进行准确标定。传统的标定方法存在技术落后、操作烦琐、自动化水平低、人为误差大等问题,导致雷达在观测中不能精准定位降水目标位置,无法有效保证人工影响天气作业的准确性,从而降低作业质量。
目前,太阳法是气象雷达天线波束指向定标方法中操作最简便且精度较高的方法。中外天文学家们提出的诸多太阳位置算法中,Reda的太阳方位角和高度角算法、Bourges的赤纬角算法、Lamm的时差算法精度最高,更接近于实际[2]。在利用太阳法开展雷达标校的应用研究方面,曹俊武等[3]深入研究了太阳辐射校准天气雷达方位和仰角的可行性及方法,并利用业务雷达开展了校准试验,取得了较好的应用效果;王婷等[1]将太阳法应用到标定气象雷达电轴上,设计了基于Linux系统的太阳法标定软件;叶飞等[4]开展了应用太阳法标定L波段探空雷达天线电轴的相关研究,并在台站业务应用中取得了较好的效果;邵楠等[5]通过改进太阳理论位置算法、数据质量控制方法、天线控制和太阳位置搜索方式、降低天线转速,提高了新一代天气雷达天线波束指向精度。
目前太阳法尚未应用于CTL-713C型天气雷达天线波束指向定标中,研究成果将填补中国该型气象雷达定标领域的空白。
现通过研究太阳方位角、高度角与时间、经纬度、赤纬的关系,太阳辐射能量值的变化规律,工控机与终端、伺服、信号处理分系统间的接口程序,充分借鉴新一代天气雷达太阳法标定经验的基础上,设计与开发应用程序,旨在实现利用太阳法标定CTL-713C型天气雷达天线波束指向功能,以彻底解决该型雷达天线波束指向定标中存在的问题。
1 太阳辐射能量用于雷达标校的可行性分析
太阳辐射能量是随其本身活动情况而变化的,与太阳黑子的活动周期相关。太阳辐射能量可用能量流量密度(简称“能流密度”)表示,能流密度指单位时间和频率内沿法线方向通过的单位面积能量,单位为W/m2·Hz。加拿大天文台历史研究资料表明,太阳能流密度的变化有近11年的变化周期,太阳辐射到达地面的月平均微波能量最小值为65 A.U.(A.U.为太阳流量单位,1 A.U.=10-22W/m2·Hz)[3,6-7]。
雷达接收到的太阳辐射能量FS表示为
FS=10-22P(C2ΔF)-1
(1)
式(1)中:
P=10S/10/1 000
(2)
C=10G/10(V·f-1)2/4π
(3)
式中:P为雷达接收到的太阳辐射功率,W;C为天线有效截面积,m2;ΔF为接收机中频带宽,Hz;S为接收机灵敏度,dBm;G为雷达天线的有效增益,dB;V为真空中的光速,V=2.997 924 58×108m/s;f为雷达中心频率,Hz。
CTL-713C型天气雷达参数如表1所示,将参数代入式(1)~式(3),可计算得出雷达能接收到的太阳最小能流密度为34.2 A.U.,小于太阳辐射到地面的最小能流密度,所以该型雷达理论上完全能够接收到太阳噪声。

表1 CTL-713C型天气雷达参数指标Table 1 The parameters of CTL-713C weather radar
2 太阳位置计算方法
地平坐标系是天文观测和研究中使用率最高的天球坐标系。在该坐标系中,天球中心与观测者位置重合,中心点为观测者所在地,参考平面为所在地的地平线,太阳在天球中的位置用太阳高度角和方位角来表示。太阳运动位置如图1所示,太阳直射光线与地平面的夹角称为太阳高度角,太阳直射光线在地平面上的投影线与地平面正南方向的夹角称为太阳方位角。正南点S与中心点的连线作为方位角0°,任何一天内上、下午的太阳位置对称于正午(即真太阳时12:00),上午偏向东,方位角为负值,下午则相反[8-11]。
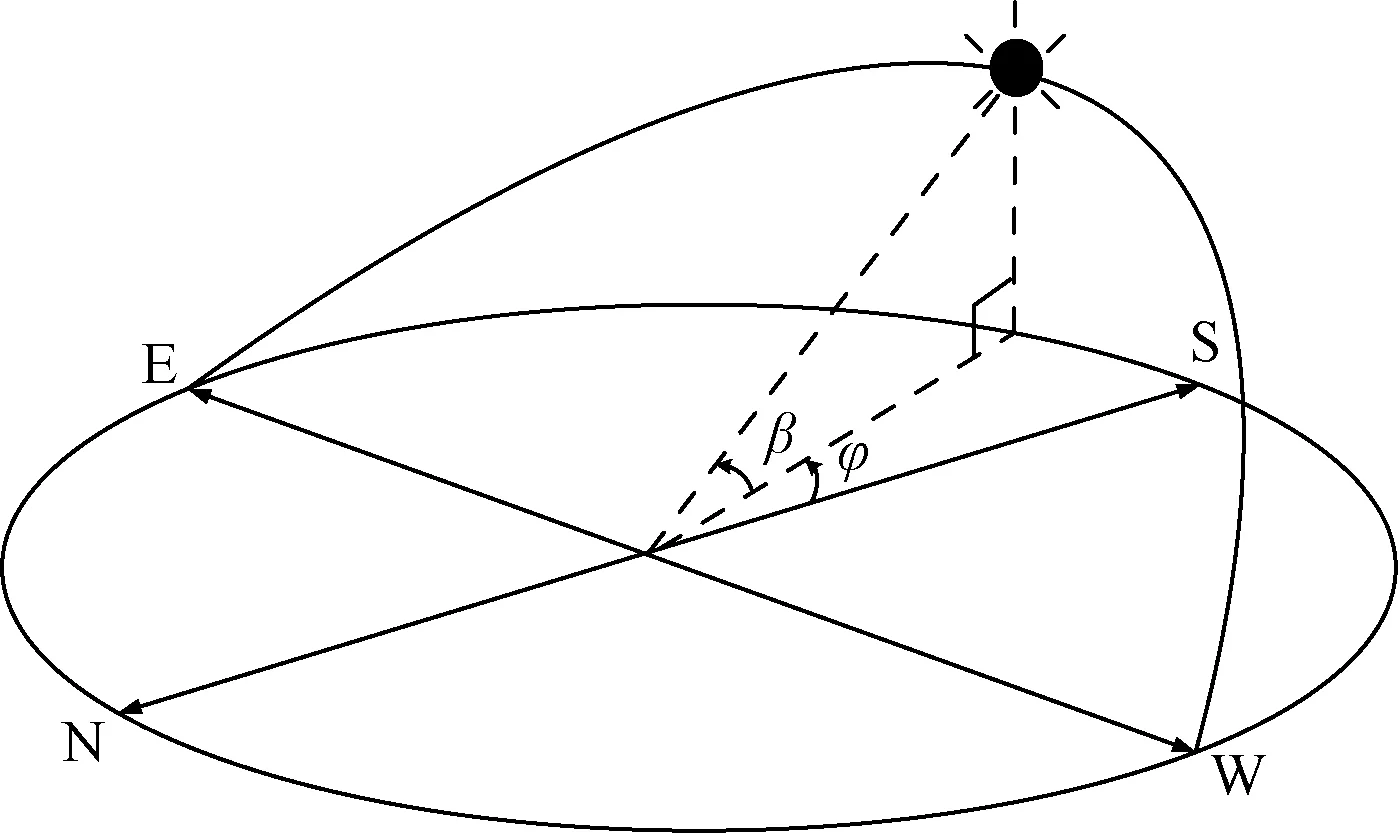
图1 地平坐标系中太阳运动位置Fig.1 The sun position in the horizontal coordinate system
2.1 太阳高度角和方位角算法
太阳高度角和方位角计算式为
sinβ=sinαsinδ+cosαcosδcosω
(4)
(5)
式中:β为太阳高度角,(°);φ为太阳方位角,(°);α为观测点的纬度,(°);δ为太阳视赤纬角,可以根据天文年历查得;ω为太阳时角,(°)。
2.2 赤纬角算法
赤纬角是指地球赤道面与太阳中心和地球中心连线间的夹角,其变化以年为周期,计算公式为
δ=0.372 3+23.256 7sin(xt)+0.114 9sin(2xt)-0.171 2sin(3xt)-0.758 0cos(xt)+
0.365 6cos(2xt)+0.020 1cos(3xt)
(6)
式(6)中:x=360/365.242 2,t=n-1-n0(世界时0:00算起),n0=78.801+[0.242 2(年份-1969)]-INT[0.25(年份-1969)]。
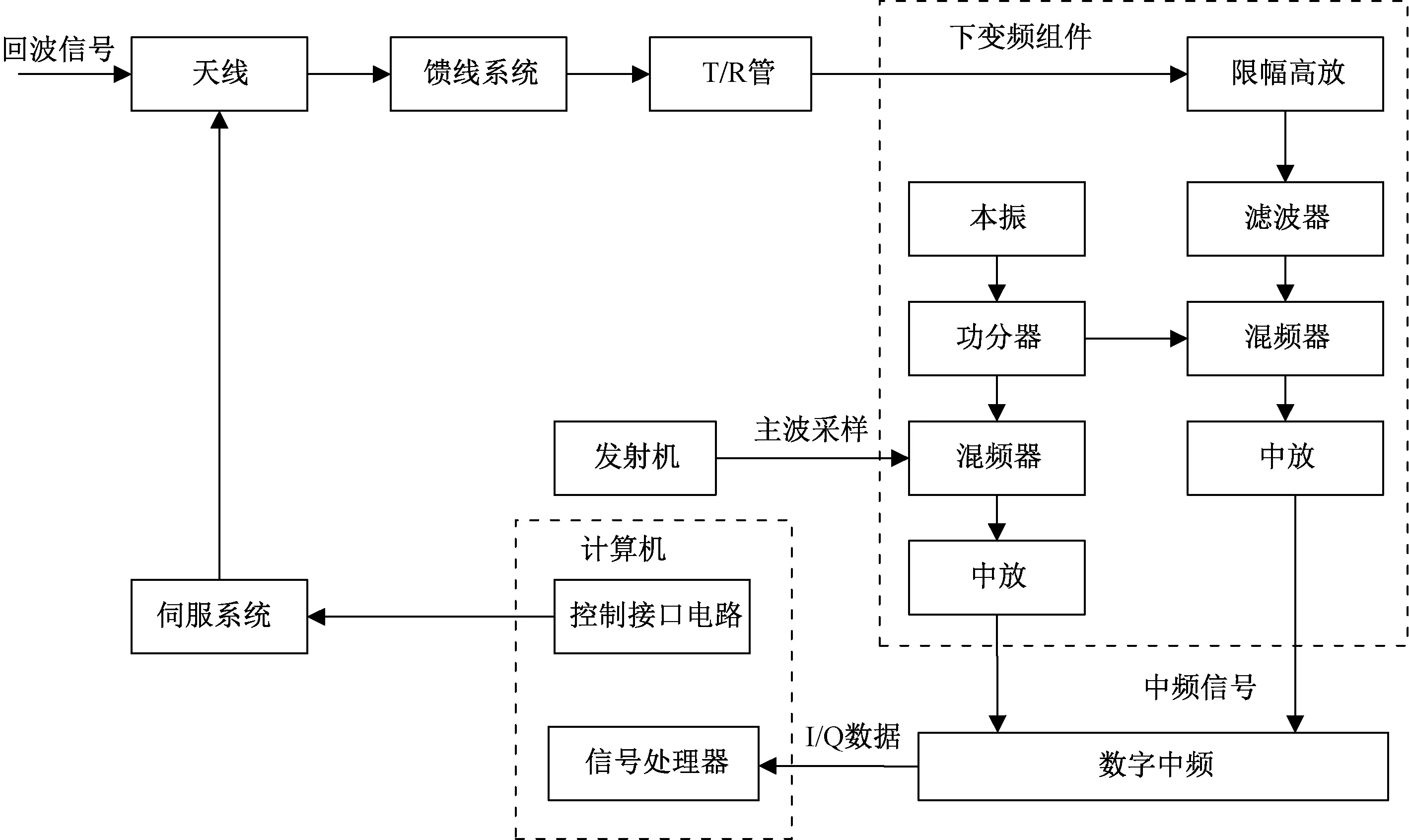
图2 回波信号接收流程示意图Fig.2 The flow diagram of echo signal receiving
2.3 时角算法
太阳时角是以第一赤道坐标系确定天球上的太阳位置时所使用的坐标参数。时角即单位时间内地球自转的角度,也称为真太阳时。日常生活中所用的时间称为平太阳时。太阳时角计算中,须将平太阳时转换为真太阳时。时差指真太阳时与平太阳时的差值,其每时每刻都在变化,计算公式为
ω=15(h+eot)+E-300°
(7)
(8)
式中:h为标定操作的北京时间;eot为时差;E为观测站经度;N指从每一个闰年开始为1,4年一个循环,最后一天为1 461,k、Ak、Bk的值如表2所示。
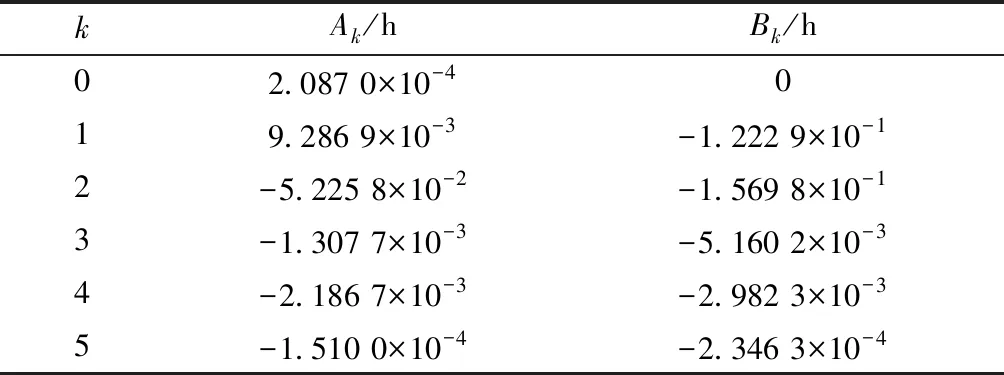
表2 Ak和Bk参数值Table 2 The parameter values of Ak and Bk
3 软件设计与实现
3.1 回波信号接收流程介绍
雷达回波信号接收流程如图2所示,回波信号经天线、馈线系统、T/R管进入接收系统,接收系统由下变频组件和数字中频组件两部分组成,其中下变频组件由限幅高放、滤波器、混频器和中放组成。限幅高放的作用是对信号进行限幅及放大,滤波器用于过滤带外信号,滤波后的信号和本振信号经混频器输出60 MHz中频信号,中放对信号二次放大及滤波,输出最窄发射脉冲信号至数字中频。数字中频模块在对中频信号进行A/D采样和中频处理后,合成的两路数字I、Q信号(14 bits)通过光纤送至信号处理器,信号处理器端的光纤接口将并行I、Q信号送至内部高速总线,DSP接收数据并处理。信号处理采用的算法包括数字视频积分处理、地物对消、快速傅里叶变换(FFT)、脉冲对处理(PPP)等,这些算法能够有效滤除杂波干扰,消除距离和速度模糊,进行信号拟合及平滑处理。信号处理对信号强度值的估算精度误差不超过1 dB[12]。
3.2 软件设计原理
本软件设计思路为:在雷达开始扫描之前,太阳法标定软件采集信号处理器的基底噪声,通过计算标定时的太阳方位角和高度角理论值,设置天线立体扫描层数和仰角间隔度数,控制雷达以计算的太阳高度角为中心进行立体扫描,在设定的扫描范围内搜索接收太阳噪声。立体扫描默认设置为10层,每层间隔0.1°,在扫描过程中将接收的回波信号强度值与基底噪声值不断进行比较,记录比较后的较大值与此刻的天线实时角度,并计算该时刻的太阳理论角度。当雷达天线主瓣轴对准太阳时,则回波信号强度值最大。立体扫描结束后,找出记录的最强回波时刻对应的天线方位角和俯仰角、太阳理论方位角和高度角数据,计算太阳理论角度值与实测天线角度值误差,依据计算结果对雷达天线波束指向进行定标,修正天线角度误差。软件原理如图3所示。
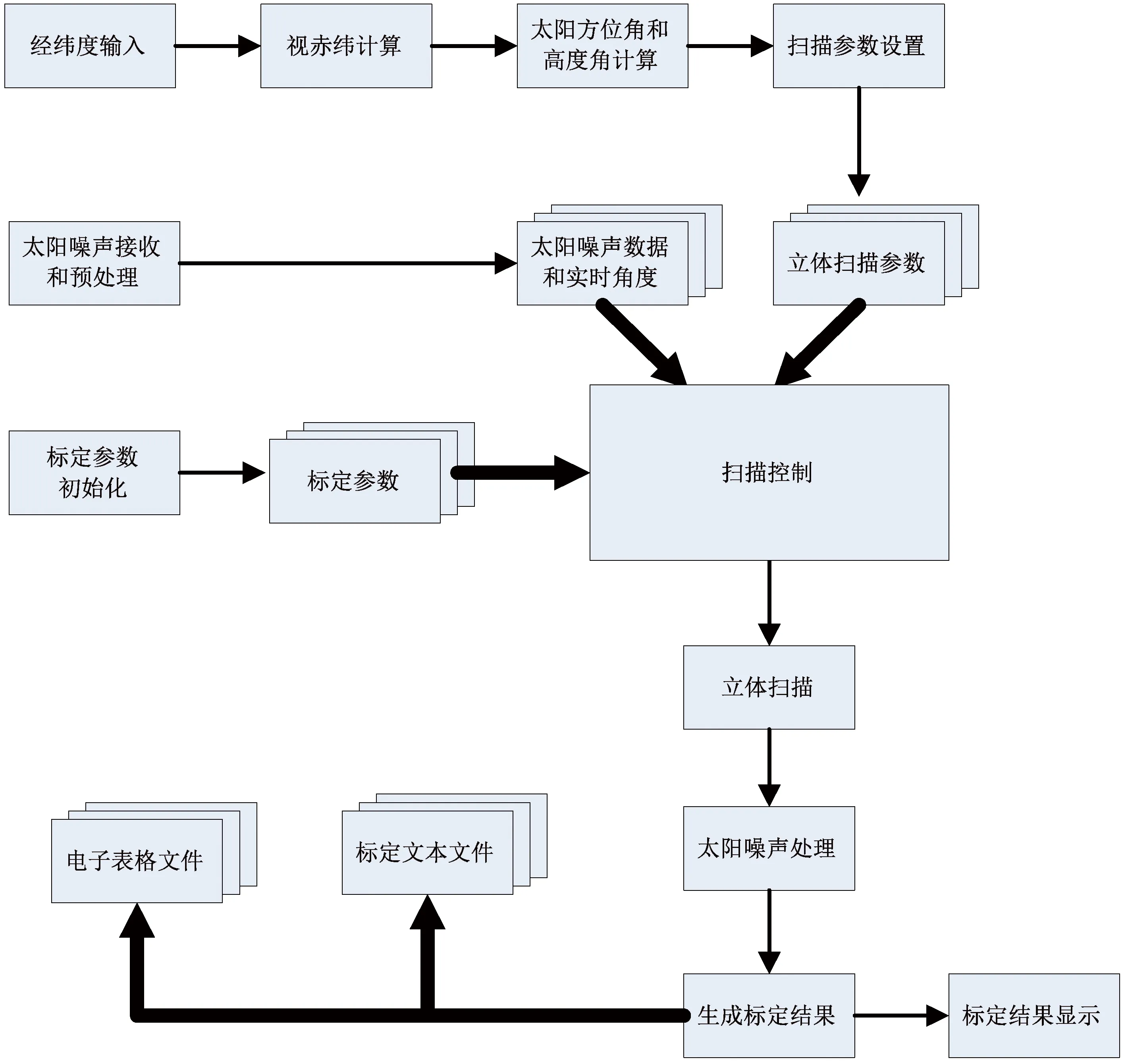
图3 软件原理框图Fig.3 The software block diagram
3.3 软件实现方法
系统软件以Microsoft Visual Studio 2008为开发平台,采用Visual C++和MFC类库作为编程语言,采用文档/视结构、消息映射、事件驱动和多线程控制模式,以菜单驱动方式进行设计。消息响应函数接收信号处理器发送的太阳噪声数据和实时角度,使用扫描控制线程控制雷达搜索太阳噪声,标定数据导出线程将标定结果导出到Excel电子表格。
3.4 软件组成结构
软件包括系统初始化、系统参数设置、太阳方位角和高度角计算、天线扫描控制、太阳噪声采集与处理、标定六个模块。系统初始化模块用于对软件各个变量进行初始化、分配内存、读取数据表,打开信号处理器设备驱动程序,初始化计算机接口驱动程序,设置雷达系统初始工作状态等。天线扫描控制模块用于控制雷达天线按照一定的扫描模式和转速扫描,并可进行天线置位。太阳噪声采集与处理模块用于采集和处理信号处理器输出的太阳噪声电平(即AD值),保存雷达接收到太阳噪声电平最大时的雷达天线和太阳位置数据,便于标定。
软件界面及测试数据如图4所示,以2017年2月20日9:46:14的测试数据为例,依据式(4)、式(6)~式(8)计算得出太阳噪声电平最大时的太阳仰角(即太阳高度角)值为21.08°,此时雷达实际天线仰角值为20.96°,两者差值为0.12°;同样依据式(4)~式(8)计算得出太阳噪声电平最大时的太阳方位角值为124.88°,此时雷达实际天线方位角值为124.93°,两者差值为-0.05°,其余时间的测试数据计算方法以此类推。

图4 软件界面及测试数据Fig.4 The software interface and test data
3.5 软件接口
太阳法标定软件与雷达信号处理器、伺服系统间的网络通信模块采用UDP协议,该协议具有较小的传输延时,可有效减少时间误差。软件接口包括太阳噪声数据和实时角码采集、天控命令通信两部分。
3.5.1 太阳噪声数据和实时角码采集接口
软件运行在雷达主端工控机,通过PCI1接口采集信号处理器输出的太阳噪声数据和伺服系统发送的实时角度数据,并对信号处理器处理参数进行设置,接口信号流程如图5所示。

图5 太阳噪声数据和实时角码采集接口Fig.5 Interface of the sun noise data and real-time angle code acquisition
3.5.2 天控命令通信接口
软件通过PCI2接口向雷达伺服系统发送天线控制命令,控制雷达进行立体扫描,搜索太阳噪声,接口信号流程如图6所示。

图6 天控命令通信接口Fig.6 Communication interface of antenna control command
4 测试结果及应用情况
4.1 选取多个雷达站进行数据比对
测试组在内蒙古自治区选取了3个试点雷达站进行数据比对,并在不同的时间段对太阳法标定软件进行了测试,测试结果如表3~表5和图7所示。
各站测试数据处理结果如下(下述误差均指均方根误差):阿拉善盟雷达测试方位角误差0.146°,俯仰角误差0.144°;乌拉特中旗雷达测试方位角误差0.132°,俯仰角误差0.087°;鄂托克旗雷达测试方位角误差0.136°,俯仰角误差0.096°。测试结果均符合理论值与实测值均方根误差≤0.3°的技术指标要求,指标源自《常规天气雷达功能规格需求书(C波段)》[13]。
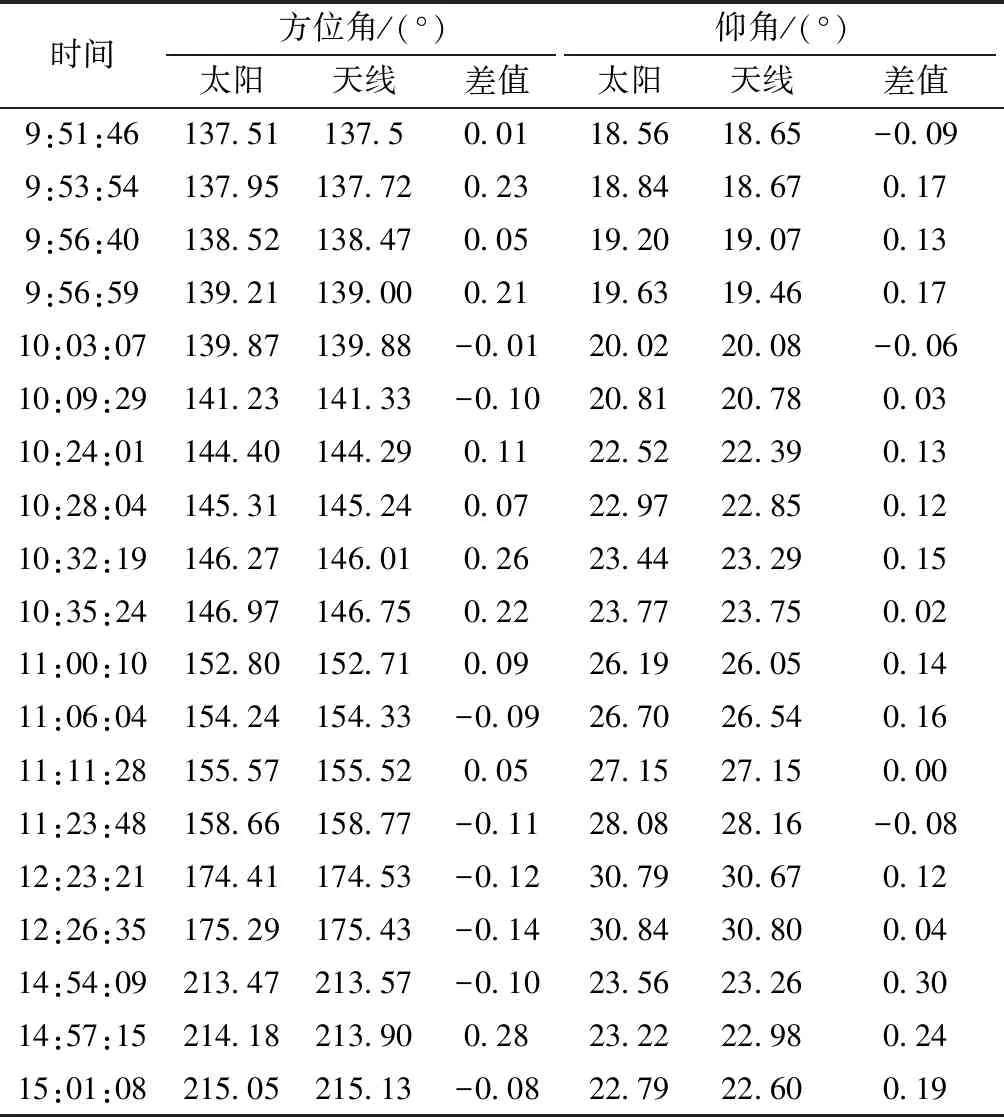
表3 阿拉善盟站测试数据Table 3 Test data obtained from Alxa League station

表4 乌拉特中旗站测试数据Table 4 Test data obtained from Urad Middle Banner station
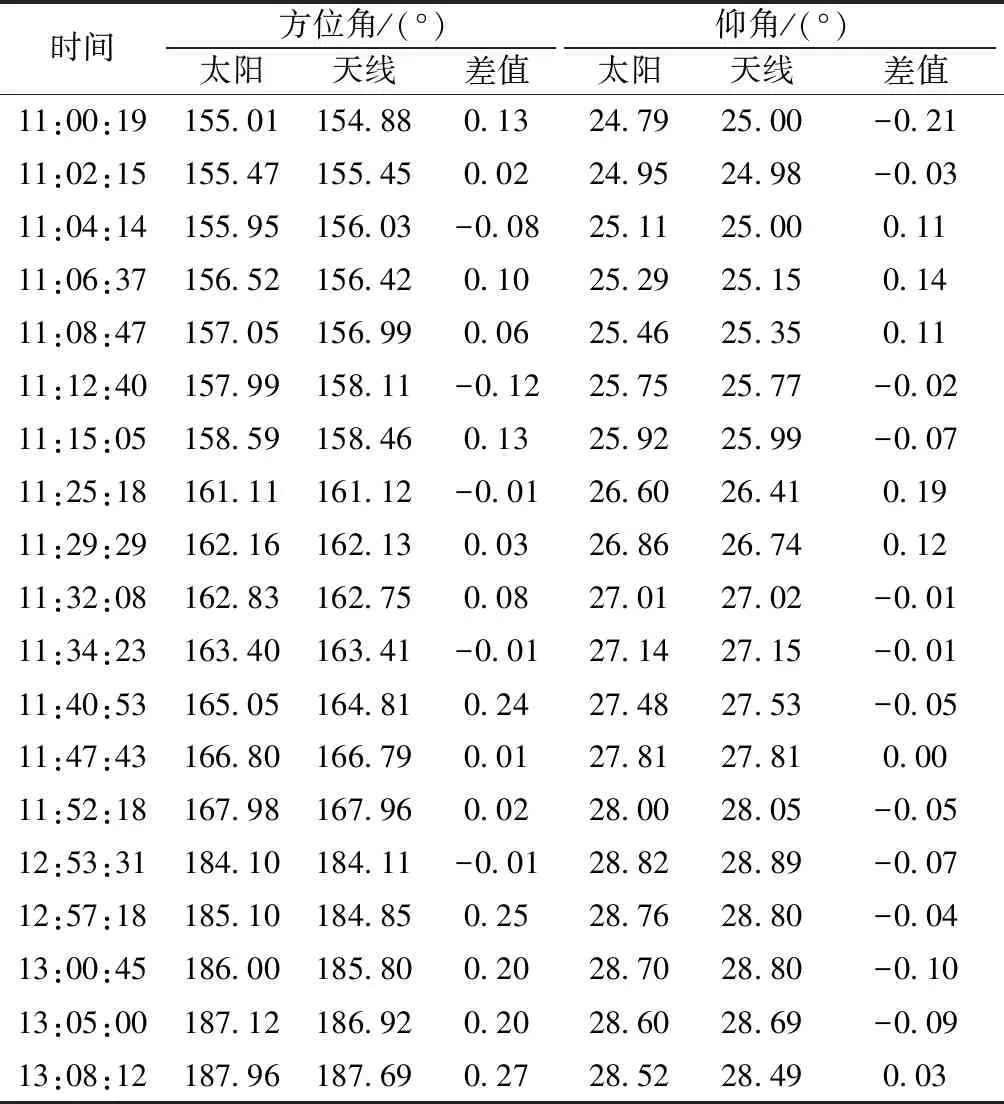
表5 鄂托克旗站测试数据Table 5 Test data obtained from Otog Banner station

图7 观测站测试数据差值曲线Fig.7 Test data difference curve observation station
4.2 太阳法与传统定标方法的数据比对
2017年10月27日,达茂旗常规天气雷达站建设过程中,在未安装天线罩前,技术人员采用传统的标定方法和太阳法分别对雷达方位仰角进行了标定,具体方法如下:
(1)采用重锤法对雷达仰角零度进行标定。方法:将天线仰角置于 0°附近,在反射体口径正上方处挂一重锤线控制天线仰角,使重锤线与反射体口径下方边缘平行。为确保该项标定的准确性,需在无风条件下反复进行检查。
(2)通过北极星标定经纬仪的方位零度,并用经纬仪完成雷达方位零度的标定。方法:经纬仪架设在距天线装置500 m外的位置,调整好经纬仪,并根据当地北极星位置对经纬仪指北针进行订正。将天线的仰角置于零度附近,转动天线,使经纬仪瞄准天线口径截面上前后两边缘,记下此时经纬仪的方位角读数θ,设雷达的方位角为α,则有α=θ±90°。如图8所示,标定时应考虑不同观测北极星时间的角度修正值。
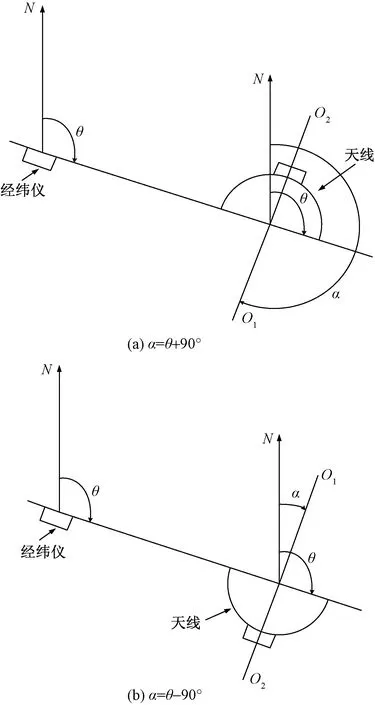
图8 采用经纬仪法标定雷达方位角零度示意图Fig.8 The diagram of theodolite method used to calibrate radar antenna azimuth angle zero
(3)采用太阳法在线标定雷达方位、仰角,检验标定数据误差是否在技术指标要求范围内,数据如表6所示。从标定结果来看,用传统方法标定后,再用太阳法检测,方位均方根误差0.153°,俯仰均方根误差0.089°,两站太阳方位角、高度角理论计算值与雷达实测值的均方根误差小于0.3°,符合技术指标要求,传统标定方法与太阳法标定两者的数据一致性得到了验证。
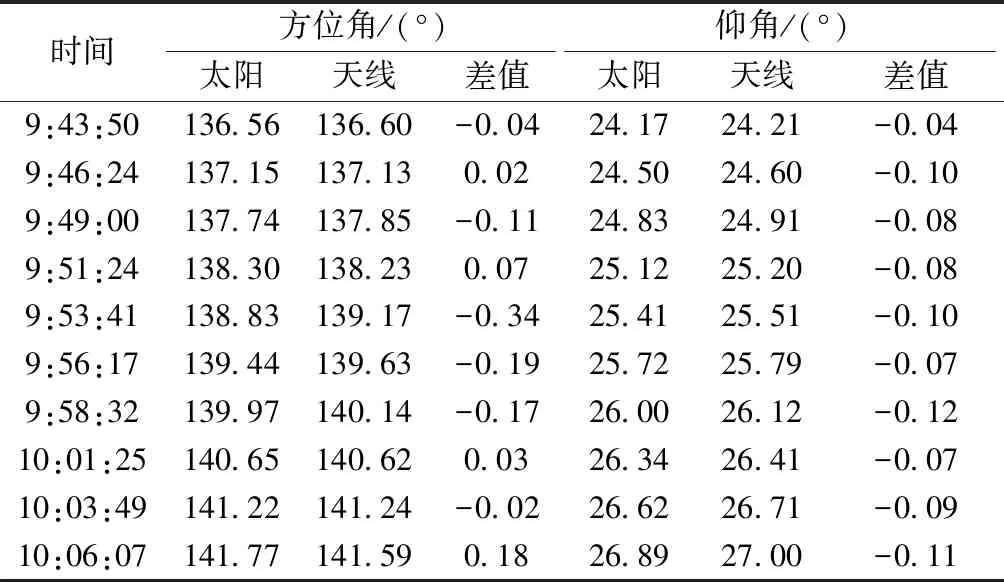
表6 达茂旗雷达安装时太阳法测试数据Table 6 Test data of sun method when radar installed in Damao Banner
4.3 不同季节的数据比对
测试组选取了2月、8月、11月的三个时间点,在阿拉善盟雷达站进行软件测试数据比对,数据差值曲线如图9所示,从结果来看,太阳法角度理论值与实测值的误差均方根值均小于0.3°,符合技术指标要求。
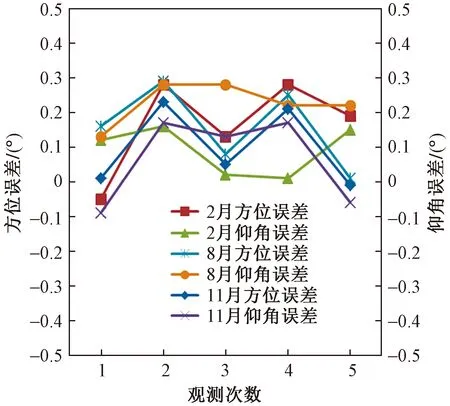
图9 阿拉善盟站不同季节太阳法测试数据差值曲线Fig.9 Difference curve of the sun method test data of Alxa League station in different seasons
5 定标中注意事项
用户利用该软件对雷达波束指向定标时,应注意以下事项。
(1)标定前应退出工控机713CD控制终端程序,并将发射机高压断开。
(2)为确保测试数据准确性,测试前必须检查雷达经纬度信息是否准确,将计算机时间校准为北京时间,并定期检查天线座水平是否符合要求。
(3)软件测试时应保证太阳高度角为8°~50°,最佳范围为15°~30°。
(4)在晴空无云状态下进行检测。
(5)海边或者雷达站四周有大面积湖泊的,可能上午和下午测试结果偏差会比较大,这是因为水汽折射造成的,属正常现象,可根据当地主要探测方向确定测试结果。
(6)如果存在同一时段内的多次测试结果不稳定的现象,则需要检查机械传动、天线水平和配重等部位[14]。
(7)软件默认的体扫层数为5层,步进角度为0.2°,用户可根据太阳高度角自行设置体扫层数和步进角度,通过最大太阳噪声确定太阳和雷达角度后,可选择方位校正、俯仰校正或方位俯仰校正进行小范围扫描,以进一步准确测量角度。
6 结论
(1)太阳法标定软件实现了CTL-713C型中频相参多普勒天气雷达波束指向自动定标功能,定标测试结果误差符合技术指标要求。该研究结果解决了一直以来该型天气雷达天线罩安装后,便无法对雷达天线方位角零度进行标定的问题,同时又增加了一种雷达天线仰角零度标定方法,该方法可与传统的重锤法相互进行验证。软件操作简捷,自动化程度高,可有效提升雷达空间探测精度及盟市人工影响天气作业的精准性。
(2)雷达系统性能正常且天空晴朗无云的情况下,太阳法测试结果较为稳定。传统的磁偏角标定经纬仪法、重锤法及作标记线方法容易受到雷达系统机械误差、地磁干扰、重锤线摆动、视觉误差等因素影响,导致雷达天线波束指向定标误差相对偏大,稳定性相对较差。
(3)太阳法测试结果也能间接反映雷达接收机、伺服系统、天馈系统是否有故障及相关指标是否正常。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
今日农业(2021年19期)2022-01-12
科学与财富(2018年30期)2018-12-28
现代计算机(2018年19期)2018-08-01
雷达学报(2018年3期)2018-07-18
航天返回与遥感(2017年2期)2017-05-24
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
计算机应用(2016年9期)2016-11-01
科技创新与应用(2016年9期)2016-05-14
体育科技(2016年2期)2016-02-28
