
基于LTE-V车辆密集场景的车联网资源分配算法①
2021-02-23 06:30唐书宇邢美华
计算机系统应用 2021年2期
惠 飞,唐书宇,邢美华,郭 静
(长安大学 信息工程学院,西安 710064)
1 引言
智能交通将车辆联网,通过车与车、车与路边设施互联,实现安全、高效的综合运输系统,成为了解决交通问题的最佳途径[1,2].3GPP 在2016年9月发布的Release 14 中完成了对LTE-V 标准的制定[3],并持续推进LTE-V2X 的标准化工作.在Release 14 中,3GPP 确定了两种通信方式[4],如图1所示.在集中式(Mode 3)情况下,车辆运行于基站蜂窝网络覆盖范围内,基站集中式调度车辆的通信资源.在分布式(Mode 4)情况下,车辆不需要依靠基站,可以自主选择无线资源进行通信.LTE-V 应用业务通过Uu 接口(Mode 3)或PC5 接口(Mode 4)定期发送协作感知消息(Cooperative Awareness Messages,CAM),将自车信息告知周边车辆,从而完成紧急告警、车辆协作等车联网功能[5,6].
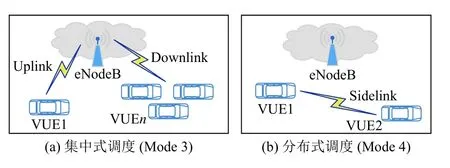
图1 两种通信方式
在LTE-V 中,解决因资源分配不合理引起的通信质量下降问题是当前的热门研究方向.Yang 等[7]根据车辆的行驶方向对资源池进行划分,提出了一种城市场景下的车辆通信自主选择方案.Kim 等[8]基于VUE的方向、位置等参数,提出了城市环境和高速环境的两种资源分配方案.Botsov 等[9]为实现资源池有限资源的重用,将道路划分为若干个区域,并为每个区域分配资源.Masmoudi 等[10]专注研究Mode 4 下的资源分配方案,考虑VUE 设备同时使用V2V 和V2I 链路的情况.Ye 等[11]利用深度学习的方法,在确保V2V 通信时延不受影响的前提下,最大限度的减少对V2I 的干扰.Gonzalez-Martin 等[12]提出了LTE-V 的通信性能分析模型,使用平均PDR和4 类传输错误作为评价通信质量的指标.
当前主流研究方向仅考虑单一模式下的通信场景,并对资源分配算法进行改进.本文提出一种城市道路场景的车辆自主调度算法.首先根据通信性能指标对车联网应用业务进行划分,车辆应用根据分类结果选择不同的底层接口通信.主要目的是将V2V 基站调度通信(Mode 3)和直连通信(Mode 4)的方式相结合,减轻密集场景下单一模式通信的资源分配压力.在V2V应用适合直连通信的情况下,车辆选择使用Mode 4 通过PC5 接口以广播的形式发送自车消息,来完成安全业务,避免占用LTE 资源;在应用更适合基站转发通信的情况下,基站采用动态调度的方式,通过车辆的Uu 接口,将通信资源动态的分配给车辆.本文通过Matlab 搭建仿真平台对所提出方案进行了评估,并与单一模式下的主流资源分配算法进行了比较.结果表明,本文所提方案能够将PDR保持在0.6 以上,优于其他两种模式下的主流资源分配算法.
2 LTE-V 系统模型
在LTE 系统中,无线通信资源是一种时域为帧,频域为子载波的二维时频资源.在时域中,每个帧的长度为10 ms,由10 个1 ms 的相等子帧(Sub-Frames,SF)组成.每个1 ms 的相等子帧为一个调度周期,被称为传输时间间隔(Transmission Time Interval,TTI).每个子帧进一步被划分为两个长度为0.5 ms 的时隙,每个时隙由7 个正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)符号组成.在频域上,12 个带宽为15 kHz 的连续子载波构成一个带宽为180 kHz 的频块.持续时间为一个时隙的频块被称为资源块(Resource Block,RB).RB 在资源池里表示最小频谱资源,一个RB 包含84 个子载波,其中,每个子载波能携带多少数据位由调制与编码策略(Modulation and Coding Scheme,MCS)所决定.传输一个CAM 的RB集合被称为传输块(Transport Block,TB),在传输消息时所使用的TB 的集合被称为一个资源池,如图2所示,资源池管理器提供一定数目的目标资源,当有资源请求时,资源池给其分配通信时频资源,然后将该资源标识为忙,标识为忙的资源不能再被分配使用.

图2 LTE-V 通信资源池
LTE-V 设备的两种通信模式发送数据包需要分别通过不同类型的空中接口,Mode 3 使用蜂窝通信接口(Uu),Mode 4 使用直连通信接口(PC5),如图3所示.在基于PC5 的V2X 通信方式中,VUE 之间的通信不需要基站的参与,而是直接通过旁侧链路(sidelink)将数据发送给其他的VUE.在这种方式下,资源分配由终端自主进行,车辆通过其他VUE 的调度分配(Scheduling Allocation,SA)信息或者检测Data 功率来避免发生数据包碰撞.在基于Uu 的V2X 通信方式中,VUE 先将数据通过上行链路(uplink)传输给基站,然后基站再将数据通过下行链路(downlink)转发给其他VUE.这种方式下,通信资源由基站根据VUE 的特定信息进行统一调度.基站动态分配通信资源给蜂窝网络覆盖范围内的VUE.

图3 LTE-V 通信方式
3 业务场景分析与分类
中国汽车工程学会(China Society of Automotive Engineers,CSAE)合作式智能运输系统车用通信系统标准制定工作组在根据车联网应用的典型性和技术成熟度,确定了17 个应用为一期应用[13],涵盖安全、效率、信息服务3 大类.本文选取17 个一期应用中的12 个安全类应用进行业务场景分类,根据应用的通信时延、通信距离要求和应用运行的实际场景需求,将应用划分为基于PC5 接口通信的应用、基于Uu 接口通信的应用和基于PC5 或Uu 接口通信的应用.应用业务划分结果如表1所示.
Uu 接口和PC5 接口所对应的通信模式具有不同的适用特点.适合Uu 接口通信的应用场景的特点一般为车辆设备运行过程中通信易出现遮挡物,设备与设备之间通常处于非视距情况下,通信距离一般较远,并且对通信时延的要求较低;适合PC5 接口通信的应用场景的特点一般为车辆设备之间通信距离较近,通常处于视距范围内,通信过程中不易出现遮挡物,因此适合直连通信,并且由于车辆设备之间距离较近,对系统实时性和通信时延要求更高.
接下来,根据通信模式特点和标准所描述的应用运行场景,对12 个安全类应用进行具体分析.在前向碰撞预警、交叉路口碰撞预警等车辆预警类应用的实际使用场景中,主车(Host Vehicle,HV)与远车(Remote Vehicle,RV)处于相同或邻近车道,RV 通常在HV 的视距内,V2X 应用需要根据HV 与RV 的车辆信息快速做出反应进行预警或执行其他操作,避免车辆碰撞.该类型场景具有VUE 之间距离较近、系统实时性要求高等特点,因此更适合直连通信,选择PC5 接口.而异常车辆提醒、车辆失控预警、道路危险状况提示等应用需要VUE 或路边设施(Road Side Unit,RSU)在异常情况发生时将相关信息通知给道路上的其他VUE,在这些场景中HV 和RV 或HV 和RSU 的位置具有不确定性,并且通常在非视距情况下,此时直连通信易受障碍物遮挡或距离等因素的影响,通信效果较差,因此更适合蜂窝接口通信,选择Uu 接口.在弱势交通参与者预警应用的实际场景下,弱势交通参与者如行人、非机动车等通过手机或其他移动设备进行定位,并将相关道路信息告知周边VUE,由于手机等设备与车辆通信只能通过蜂窝网络,因此选择Uu 接口.限速预警和闯红灯预警应用的实际场景中,RSU 对限速区域或十字路口范围内的HV 发出预警,RSU 与HV 通常处于视距情况下,通信设备之间距离较近,但是对实时性要求较低,在两种模式下都适用.此时,根据本文提出的车辆自主调度算法,VUE 将依据实际无线资源占用情况选择合适的接口进行通信.
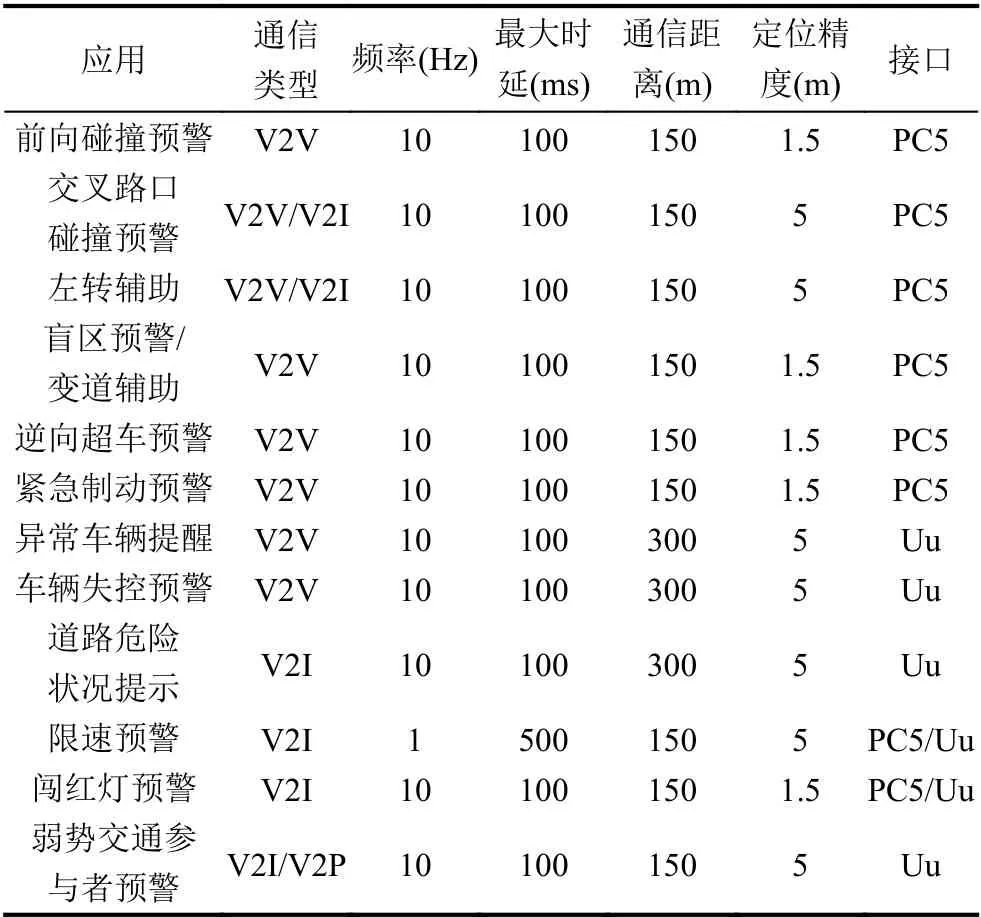
表1 车联网应用业务划分结果
4 系统假设与资源分配算法
4.1 系统假设
城市道路场景一般特征为车流量较大且车辆运行速度较低[14].典型的城市场景如图4所示,对图4中的场景进行建模,提出如下假设.
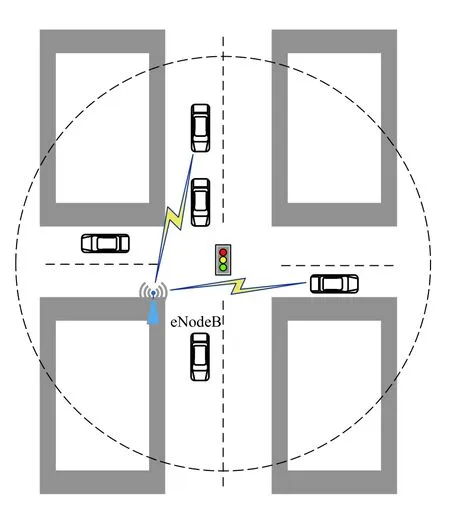
图4 城市道路典型场景
设图4场景中的LTE-V 网络具有NRB个RBs,单个基站,场景中有N个VUE.所有VUE 均在基站覆盖范围内,VUE 之间可通过PC5 接口或Uu 接口进行数据传输.VUE 在行驶中的速度为15~40 km/h;在十字路口处选择前行的概率为0.5,选择左转和右转的概率均为0.25;并且随机分布在基站范围内集合服从用户密度为Λ 的泊松分布.在区域S 中,存在k个VUE 的概率Uk如下:

在城市道路场景中,高密度的用户量会给有限的LTE 网络资源分配带来一些问题.本节将介绍LTE 下行无线资源分配算法,D2D 通信算法和车辆自主调度算法.车辆通过自主调度算法根据应用业务种类特性的不同对V2X 应用进行分类,使通信距离和实时性要求低的应用通过D2D 传输,避免占用LTE 资源,从而降低LTE 网络资源的占用率,提高密集场景下的V2X通信实时性和可靠性.
4.2 下行无线资源分配算法
LTE 信道质量变化和QoS 参数会对V2X 安全应用的可靠性产生较大影响,是下行无线资源分配算法需要考虑的两个重要问题.目前常用的算法包括轮询调度(Round Robin,RR)、最大载干比算法(Max C/I)和比例公平算法(Proportional Fair,PF).RR 算法以轮询的方式对VUE 进行调度,相对简单,对设备物理资源占用少,但是当请求服务时间变化较大时,容易导致服务器间的负载不平衡.Max C/I 算法和PF 算法通过考虑信道质量的影响,合理分配资源使系统获得较大的吞吐量,能够满足更多通信情况下的资源分配需要.其中,PF 算法对每个有调度需求的用户根据PF 度量值分配一个优先级,既能实现用户的公平性,又能提高系统的吞吐量.PF 算法如下:

V2X 安全应用具有较高的时延敏感性.考虑数据缓冲区队列时延,对PF 算法进行改进,将数据缓冲区队列时延与业务优先级之间映射为指数关系,能够在较大用户数量的情况下,优先保证时延敏感类业务的通信.改进的后的算法为指数比例公平算法(EXP/PF),如下:
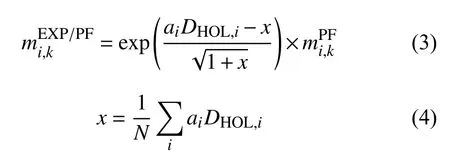
其中,ai为时延敏感度,为用户i的信道质量参数,DHOL,i为缓冲区队列时延,x为N个用户的时延优化参数的平均值.
选择Uu 接口通信的V2X 应用,VUE 根据参考信号SINR 评估下行链路特性,并计算对应的信道质量指示(Channel Quality Indication,CQI)上报给基站,所有VUE 计算的CQI 的值反映了蜂窝网络全网性无线信号覆盖质量,基站根据VUE 上报的CQI 获取完整的信道状况,实现对依靠蜂窝网络通信的VUE 进行集中式的调度.基站通过CQI 和分组数据缓冲区队列的时延使用EXP/PF 算法对用户进行优先级排序,然后按照优先级顺序分配资源.EXP/PF 算法在考虑用户公平性的同时适合为时延敏感类业务实时分配资源,能够保障VUE 获取最佳的LTE-V 下行链路性能,从而满足基于Uu 接口的V2X 应用资源分配需要.
4.3 D2D 通信算法
在LTE-V 系统中,V2X 设备使用PC5 接口,通过sidelink 可以进行不需要依靠基站的D2D 通信.Sidelink中的旁侧链控制信道(Physical Sidelink Control Channel,PSCCH)用于传输SA 信息,SA 信息中包含旁侧链控制信息(Sidelink Control Information,SCI).与数据传输相关的信息包括接收端UE 预留时间间隔、初始传输和重传频率位置,编码调制方案等信息通过SCI 在PSCCH上传输.接收用户对SA 信息进行解码得到发送用户的时频资源位置,从而能够完成合理的资源分配,准确的接收信息.
在D2D 资源分配方案中,为了避免用户车辆密度大导致的资源碰撞问题,提出了一种基于能量检测的资源分配方法[15].VUE 在资源选择前先根据参考信号的接收功率(Reference Signal Received Power,RSRP)进行资源感测,之后根据RSRP 的大小对资源池中的RBs 进行排序,将功率较低的一部分资源作为候选RB子集.如果候选RB 子集的RSRP 低于当前占用资源的RSRP,则认为候选部分的资源可以使用,从候选RB 子集中随机选择资源进行占用,否则仍然使用当前资源进行传输.在基于能量检测的资源分配方案上进行改进,引入半持续调度(Simi-Persistent Scheduling,SPS)的资源分配方法[16].该算法主要分为3 个步骤:资源感知,资源选择,资源重选.SPS 算法如图5所示,说明如下.

图5 SPS 算法
(1)资源感知
VUE 持续监测最近接收的SF,通过解码得到的SA信息和旁侧链路接收信号强度指示(Sidelink Received Signal Strength Indicator,S-RSSI)来确定RB是否被使用.VUE 将所有可使用的资源整理为感知窗口(sensing window),并根据S-RSSI 的阈值在感知窗口内对资源进行筛选,确定其中最优的20%资源.3GPP 通常通过设置–107 dBm/RB 来计算S-RSSI 的阈值[17].如果剩余资源的数量小于感知窗口中总资源的20%,则增加3dB的RSRP 重新计算S-RSSI 阈值,直到可用资源超过20%.VUE 将该20%的资源视为可用资源,创建选择窗口(selection window).
(2)资源选择
VUE 根据资源计数器的值在选择窗口内随机选择资源进行通信,每次通信后资源计数器的值减1,资源计数器的值由CAM 的预留时间间隔(Resource Reservation Interval,RRI)决定,通常取值为5~10.VUE 对当前已选择的RBs 进行持续占用,直到资源计数器的值减为0,此时VUE 需要根据重选机制考虑是否对资源进行重新选择.
(3)资源重选
若资源计数器的值减为0,VUE 判断生成的随机数是否大于重选概率p,若是,则重置资源计数器并保持现有资源,不进行重新选择.若随机数小于p,VUE 释放当前选择的资源,并根据S-RSSI 的值对资源进行重新感知筛选,生成新的选择窗口.
在SPS 算法中,资源感知主要是为了获取其他VUE使用的RB 情况,使VUE 能够确定资源池中的资源哪一部分是可用的.生成选择窗口后,VUE 每个周期的通信任务仅对选择窗口中传输一个CAM 大小的RB 集合进行选择并占用,其他VUE 仍然可以使用该选择窗口内的未被占用的其他资源.当VUE 完成该周期的通信任务后,将释放已占用的资源,此时这部分资源可供其他VUE 进行使用.在车辆密集场景下,道路中的VUE不断地对LTE-V 直连链路通信资源进行感知、筛选,排除掉接收功率弱或者已被占用的资源,最小化直连通信中由于VUE 数目过多引起的数据包冲突概率,从而实现车联网的可靠通信.
4.4 车辆自主调度算法
本文根据第3 节的业务场景分析与划分结果,提出一种V2X 应用业务分类器.车辆在使用V2X 应用时,车辆自主调度算法通过业务分类器对应用进行划分,应用根据分类器指定的底层空中接口(Uu 或PC5)进行V2X 通信,从而实现对通信方式进行自主调度.
V2X 应用业务分类器首先根据业务场景划分结果对车联网应用的应用标识(Application IDentifier,AID)进行分类记录,每个应用有3 种类型的通信模式可选择(仅选择Uu 接口,仅选择PC5 接口,Uu 接口和PC5接口都可选择),车辆设备在通信过程中,车联网应用的数据包经过逐层封装,到接入层选择空中接口时,业务分类器根据应用数据包帧头的AID 做出判断,在LTEV 两种空中接口中进行选择. 选取Sn为V2X 应用业务类型,CRSRP为SPS 算法资源选择过程中RSRP 值增加的次数,λ为设置的RSRP 最大增加次数,In为选择使用的通信接口类型,车辆自主调度算法如算法1 描述.
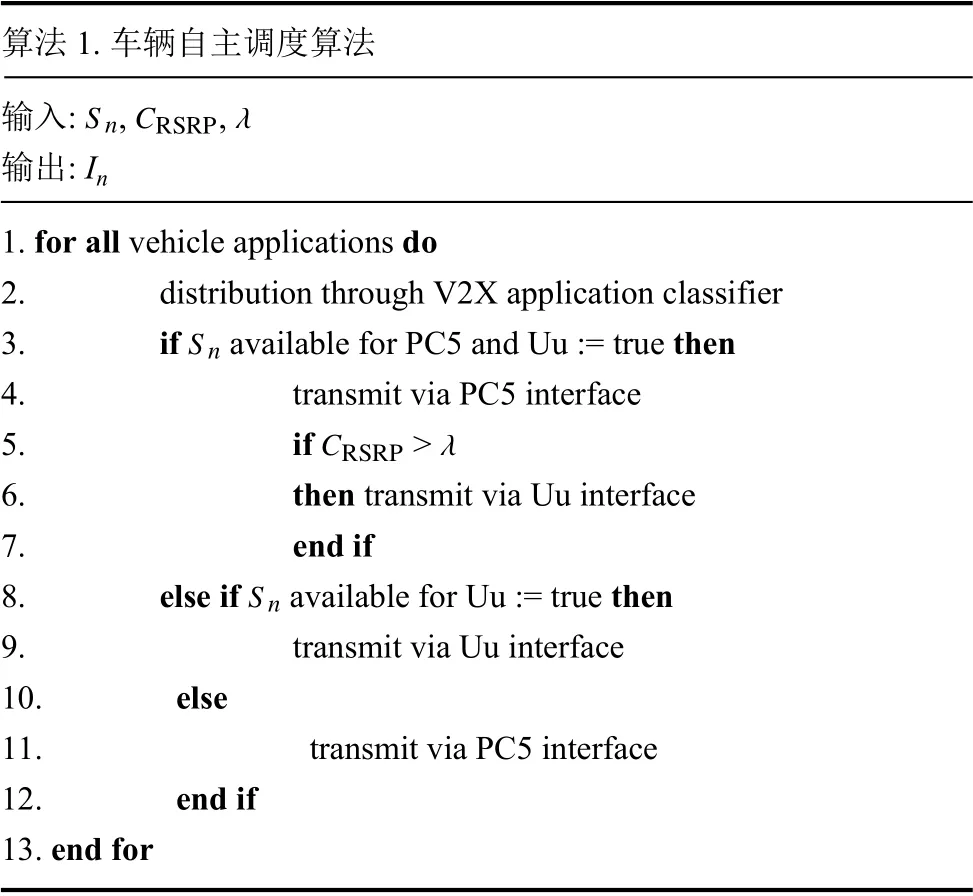
算法1.车辆自主调度算法输入:,,输出:In S nCRSRPλ 1.for all vehicle applications do 2.distribution through V2X application classifier S n 3.if available for PC5 and Uu:=true then 4.transmit via PC5 interface CRSRP λ 5.if >6.then transmit via Uu interface 7.end if S n 8.else if available for Uu:=true then 9.transmit via Uu interface 10.else 11.transmit via PC5 interface 12.end if 13.end for
选择Uu 接口进行通信的V2X 应用,由基站通过VUE 上报的CQI 获取信道状况,并对VUE 配置资源,基站根据应用的QoS 需求和时延敏感性,通过EXP/PF算法对所有使用蜂窝网络通信的V2X 应用进行集中式的动态调度.选择PC5 接口进行通信的V2X 应用,由于没有基站的支持,各个VUE 需要自行对接收到的信道参数信息进行计算,获取Sidelink 资源池情况并对合适的资源做出选择与占用,VUE 通过SPS 的资源分配方法,解码SA 信息,对资源池进行能量感知,资源选择以及资源重选,以此保证V2X 应用的优先级和时延需求得到满足.当V2X 应用既适合PC5 通信又适合Uu通信时,V2X 应用业务分类器优先选择PC5 接口,通过直连链路通信.SPS 算法根据RSRP 的值计算S-RSSI的阈值筛选出资源池中的可用资源.若可用资源较少,则增加3 dB 的RSRP 值重新确定阈值进行资源筛选.在筛选过程中,RSRP 的值增加的次数越多,则表示资源池中的大部分资源为忙.若RSRP 值的增加次数超过预设的最大增加次数 λ,则认为资源池的资源占用率较高,直连链路的无线信道拥堵情况较为严重,继续使用PC5 接口通信可能会导致由资源占用引起的数据包碰撞问题,所以切换为Uu 接口通过蜂窝网络进行通信.
最后,分析所提出车辆自主调度算法的时空复杂度.算法中每次判断选择接口的复杂度都为常数级别:Ti(n)=O(c),其中i∈{1,2,3},c为常数.总的时间复杂度为:T(n)=T1(n)+T2(n)+T3(n)=O(c)+O(c)+O(c),使用大O 计数法表示即为:T(n)=O(c).空间复杂度S(n)=O(c).
5 仿真结果分析
本节使用所提出的车辆自主调度算法通过Matlab仿真,并将仿真结果与单独使用基于Uu 接口的EXP/PF算法和单独使用基于PC5 接口的SPS 资源分配算法进行了对比,以此验证算法性能.表2为仿真的主要参数设置.为了评价算法的可靠性、延迟等通信性能,考虑使用数据包投递率(Packet Delivery Ratio,PDR)作为主要评价指标.Gonzalez-Martin 等[12]提出的分析模型认为,在LTE-V 通信过程中,如果没有任何已知类型的错误发生,则认为数据包被正确传输,因此PDR可以被表示为:


表2 仿真参数设置




图6和图7对比了3 种算法在车辆密度 β为0.2 veh/m和0.3 veh/m 时,由于路径损耗和干扰等影响因素的增大,PDR都随传输距离的增加而减少.从图中可以看出,基于PC5 接口的SPS 算法在车辆密集情况下的性能略低于其他两种算法,因为密集场景下车辆直连通信更容易产生资源碰撞,导致PDR降低.本文提出的算法在 β=0.2 veh/m 的情况下能够将PDR保持在0.67以上,在 β=0.3 veh/m 的情况下仍能将PDR保持在0.6以上,因此提出的算法性能是可靠的.

图6 不同车辆密度下的PDR (β=0.2 veh/m)

图7 不同车辆密度下的PDR (β=0.3 veh/m)
进一步分析通信中产生的错误类型对PDR的影响,表3给出了 β为0.3 veh/m 时4 种错误类型的极差,可以看出和对通信质量的影响最大,和对通信质量的影响可以忽略不计,因此,接收功率低于感知阈值和数据包碰撞是影响LTE-V 通信质量的两大原因.图8、图9和图10是3 种算法在 β为0.3 veh/m时和随距离变化的趋势图,对比得知,不同算法下的值和随距离变化的趋势基本一致,对SPS 算法的影响最大,对EXP/PF 算法的影响略小,本文提出算法的能够保持在0.2 以下,能够有效减少通信过程中的数据包碰撞从而提高LTE-V的整体通信质量.
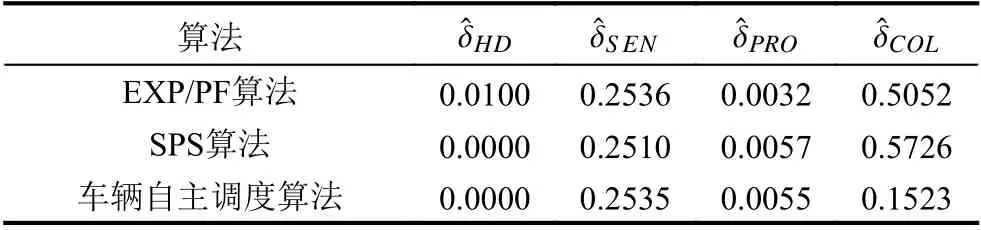
表3 不同类别错误比较
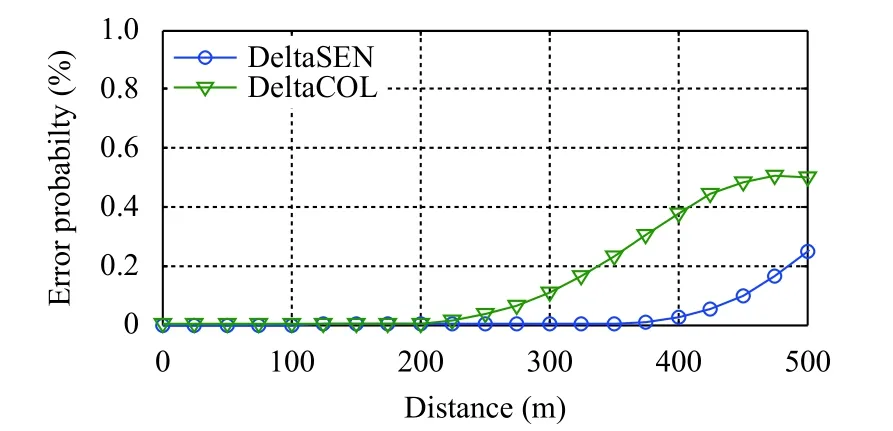
图8 两类错误的变化趋势(EXP/PF 算法,β=0.3 veh/m)
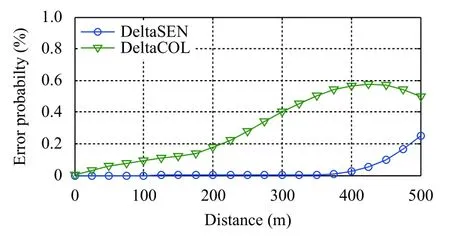
图9 两类错误的变化趋势(SPS 算法,β=0.3 veh/m)

图10 两类错误的变化趋势(车辆自主调度算法,β=0.3 veh/m)
6 结论
本文提出一种车辆自主调度算法,将LTE-V 的两种通信模式相结合.首先对CSAE 提出的12 个安全应用场景进行划分,然后通过车辆应用业务分类器,V2X 应用根据通信要求选择不同的空中接口完成应用业务,从而降低单一空中接口的通信压力和资源碰撞概率.最后,本文根据3GPP 的仿真要求对所提出算法进行了验证并和单一通信模式下的资源调度算法相对比,仿真结果表明,本文提出的算法在中等车辆密度(β=0.2 veh/m)的情况下,PDR能够保持在0.67 以上,在高车辆密度(β=0.3 veh/m)的情况下,PDR能够保持在0.6 以上,较传统单一通信模式下的调度算法有着明显的提升.
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
计算机系统应用(2022年8期)2022-08-25
计算机与数字工程(2022年3期)2022-04-07
物联网技术(2018年8期)2018-12-06
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
计算机应用(2016年10期)2017-05-12
科技创新导报(2016年27期)2017-03-14
科技视界(2016年17期)2016-07-15
中国新通信(2016年2期)2016-03-11
