
能时频域信息融合的信源被动定位
2021-02-21 07:01:02万鹏武姚媛媛闫千里陈煜飞
西安电子科技大学学报 2021年6期
万鹏武,姚媛媛,闫千里,陈煜飞
(西安邮电大学 陕西省信息通信网络及安全重点实验,陕西 西安 710121)
随着5G通信与物联网等技术的快速发展与普及,面向高精度位置信息服务的应用需求日益凸显。其中基于传感器网络的信源被动定位技术以其隐蔽性强、定位精度高、设备小型化等优势,已成为定位问题的重要研究内容,并被应用在如无线通信[1]、雷达[2]、卫星[3]等诸多领域。
在实际应用环境中(例如,室内、城市社区等),信源到观测站之间的障碍物使得电磁波在传输过程中普遍存在非视距(Non-Line Of Sight,NLOS)传输。在该情况下,NLOS误差将造成定位性能的严重恶化[4-5]。如何有效抑制非视距误差对定位性能的影响,拓展更为丰富的应用场景,是当前信源被动定位问题的重要研究内容。较为常见的方法是假设非视距先验信息已知,利用不同的误差消除算法减小非视距因素对定位性能的影响[6-7]。文献[6]在几何单反射圆模型下,提出了基于网格搜索的非视距无线定位方法。该方法在空间域测量参数到达角度(Angle Of Arrival,AOA)与时域测量参数到达时间(Time Of Arrival,TOA)误差较小的情况下,充分利用基站、散射体的几何特征,消除非视距误差影响并提高定位精度。文中充分利用了空域与时域测量信息,但未对非视距误差进行有效估计。针对不具备非视距先验信息的情况,文献[8]提出了利用能域测量参数接收信号强度(Received Signal Strength,RSS)的动态位置求解方法。该方法对视距(Line Of Sight,LOS)与非视距传输因子同时应用混合高斯模型,避免了对非视距链接的判断,并采用最小二乘法对目标函数进行求解,但未对定位精度做进一步修正。文献[9]中引入联合期望最大化(Expectation Maximization,EM)算法和加权最小二乘(Weighted Least Squares,WLS)算法来确定非视距定位节点并将其舍弃以规避非视距误差的影响。该方法损失了部分测量数据,且未对非视距误差做出合理估计。
当前无线通信环境日益复杂,仅靠单一域(如能域、时域、频域、空域等)信息的定位技术已难以满足高精度信源定位的需求,由此学者们开始研究多域信息融合定位机制。此举在提升定位系统对信号类型的适应能力,降低接收站数量需求,提高定位精度等方面具有明显优势。例如,对运动目标的定位过程中,普遍采用时频域融合的方法[10-12]。文献[10]采取约束加权最小二乘(Constrained Weighted Least Squares,CWLS)算法,利用中间变量与信源位置参数的关系,在粗估计的基础上进行迭代求解,以保证估计值的全局最优与实时性。相比于两步加权最小二乘法[11],该方法在测量噪声较大时仍能达到克拉美罗下界(Cramer Rao Lower Bound,CRLB)。除此以外,在定位过程中融合其他两域信息的定位方法得到了广泛而深入的研究,如能时域信息融合的定位方法[13],以及空时域融合的定位方法[14]等。随着两域信息融合定位机制的不断发展与完善,学者们开始探索多域信息融合的定位方法[15-16]。其中文献[15]研究了空时频域信息融合的定位方法。该方法根据目标与传感器间的几何关系,将高度非线性的空时频域定位方程转化为关于目标状态的线性函数,再利用加权最小二乘法估计目标状态参数。针对多域信息融合定位过程中高度非线性方程求解的难题,该方法提出了一种简单有效的闭式解算法,但未考虑复杂环境如非视距传输对定位性能的影响。
目前,非视距环境下的信源定位问题多采用单域信息或两域信息融合的定位机制;这些方法主要针对非视距误差较小的情况展开研究,且在处理过程中并未对其作出合理估计,甚至是直接丢弃[17]。笔者提出了一种能时频三域信息融合的信源被动定位算法,引入幅度平方(Squared Range,SR)和加权最小二乘算法,将能域、时域以及频域的联合定位方程求解问题转化为广义信赖域子问题,同时估计信源与非视距误差信息,利用该结果结合迭代算法进一步对信源信息进行高精度估计。
1 基于多域信息融合的信源被动定位系统

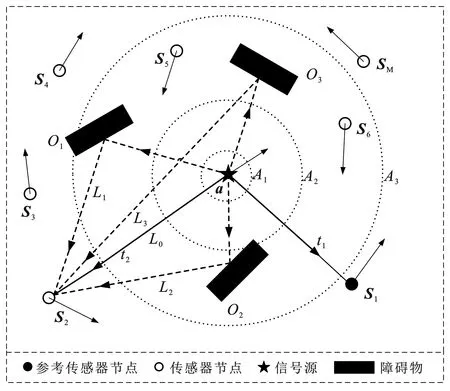
图1 能时频域联合的定位场景图
在能域,各节点所接收到的信号强度受传输路径损耗以及障碍物遮挡两方面的影响;而在时域与频域,目标信号到达感知节点的到达时间差与频率差均会受到障碍物的影响。图中以s2为例,信源辐射信号传播的路径包括视距路径L0以及分别由障碍物O1、O2、O3折射所造成的非视距路径L1、L2、L3,则信号实际的到达时间包括视距路径到达时间t2以及3条非视距路径到达时间,此时估计信号到两个节点间的时间差与频率差包含较大误差,称之为非视距误差。同时,由于信号测量本身存在的误差,这两种误差将使得定位精度恶化[6]。

(1)
其中,i=1,2,…,M,r0和A0分别是参考距离与参考距离对应的接收信号强度,μ为路径衰减因子,‖*‖表示2范数算。ΔAi为能域测量值RSS的误差因子,包括RSS测量误差li与非视距在能域的误差因子φi,即ΔAi=li+φi,则RSS误差因子矢量可表示为ΔA=[ΔA1,ΔA2,…,ΔAM]。

(2)
因此信号在时域的TDOA矢量可表示为
r=[r2,r3,…,rM]T=ro+Δr,
(3)
其中,Δr=[Δr2,Δr3,…,ΔrM]T,为TDOA误差因子矢量。

(4)

(5)
3个域的测量误差li、mj和nj均服从零均值的高斯随机分布,方差分别为σli、σmj和σnj。笔者要解决的问题,就是对包含两种误差因子的3个域测量值进行信息融合,从而精确估计信源的位置坐标与移动速度信息,并对估计结果进行比较分析。
2 能时频域信息融合的信源被动定位
2.1 能时频域信息融合的最大似然估计
(6)

(7)

2.2 基于SR与WLS的定位方程构建与求解
2.2.1 构建能域定位方程

(8)
这样的近似操作在测量数据方面损失了小部分的非视距误差,但在定位求解方面可将非视距误差φi的统计平均值作为优化变量,同时与信源信息进行估计,且可同时考虑到传播链路为视距或非视距这两种极端条件下的约束。
将式(8)重写为
(9)
式(9)两边同时乘以r0,整理得到
(10)

γ+i≈ξi‖a-si‖ ,
(11)
(12)
(13)
由于时频域定位方程在结构上具有相似性,其构建过程也与能域定位方程的构建大致相同。接下来将同时给出时频域定位方程构建的具体步骤。
2.2.2 构建时频域定位方程

rj=‖a-sj‖-‖a-s1‖+ψ+mj,
(14)
(15)
其中,j=2,3,…,M。将式(14)中等式右边的非视距误差统计平均值ψ移至左边,并引入幅度平方操作,得到
(16)
式(16)两边同时除以2(‖a-sj‖-‖a-s1‖),将包含时域测量噪声mj的相关项移至等式右边,其余项移至等式左边,得到
(17)
同理,对频域测量公式进行幅度平方操作后,将包含频域测量噪声nj的相关项移至等式右边,其余项移至等式左边,整理得到
(18)
2.2.3 定位方程的转化与求解
对改写后的能时频域定位方程进行转化求解,共包含如下4个步骤:

(19)


(20)
式(20)中各项分母均涉及范数操作,因此是高度非凸的,不能直接对其进行求解。将其各项分母中涉及范数的部分使用最大似然估计进行替换,得到
(21)
需要注意的是,虽然不能保证通过最小化式(21)可以得到最小化的式(20),但当各个域测量噪声均较小时,后者是前者的紧近似。

(22)
最小二乘目标函数中的矩阵为
(23)
其中,
(24)
其中,
(25)
其中,
约束条件中的矩阵分别为
由式(22)可看出,其最小化目标函数与约束条件均为二次的,即属于广义信赖域子问题。广义信赖域子问题虽然通常为非凸问题,但具有充分必要的最优性条件,可进行转化并由二分法求得。
步骤3根据广义信赖域子问题充分必要的最优性条件求解式(22)。由文献[19]中定理3.2可得,当且仅当存在η∈R并满足式(26)时,y∈Rn+1为式(22)的最优解。
(26a)
(26b)
由式(26)可得到
[(Wk)T(Wk)+ηD]y=WTWkTb-ηg,
(27a)
(Wk)T(Wk)+ηD≥0 ,
(27b)
式(27a)联合式(22)中的约束条件,得到式(22)中目标函数的最优解
(28)

(29)
区间I包含了所有满足式(27b)时η的可能取值,表示为
(30)
其中λmax(A,B)=λmax(B-1/2AB-1/2),表示矩阵B-1/2AB-1/2的最大特征值。

(31)
步骤4得到信源参数信息后,可求出对各个域非视距误差平均值的估计。即
(32)
(33)
(34)

算法1非视距环境下时能频多域融合定位算法。

3 计算机仿真验证及分析
针对所提出的非视距下多域信息融合的信源被动定位方法,主要对以下情况进行仿真与分析:
(1)对信源位置a估计的均方误差rRMSE(a)随测量误差σi、非视距误差最大值bmax、非视距链接数Nnlos变化的情况;
设置仿真运行次数L=10 000次,衡量算法优劣的性能评价指标针对信源位置坐标估计和移动速度估计分别为均方根误差(Root-Mean-Square-Error,RMSE)以及偏差,分别定义如下:
(35)
(36)

3.1 rRMSE(a)随各影响因素的变化情况
(1)在传感器数目N=9,非视距信道个数Nnlos=N,非视距误差bmax=9的情况下,对所提出的基于幅度平方和加权最小二乘的定位方程求解方法,分别在采用能域信息、能时域信息融合以及能时频域信息融合的情况下进行仿真验证。并与两步加权最小二乘法(Two Step Weighted Least Squares,TSWLS)进行对比。为了单独研究测量误差对定位精度的影响,这里将非视距误差固定为9。由图2可得,所有算法的定位性能均随测量误差σi的增大有所衰减。当测量误差σi较小时,非视距误差固定,影响定位性能的因素在各域基本相同,文中算法的性能不会随着联合域内信息的增加而提升。但在测量误差较大时,该定位性能的衰减幅度会有一定程度的降低,即多域信息融合能够有效对抗测量误差等性能影响因素。另外,相比于TSWLS算法,文中算法不需要关于非视距误差的先验信息,却能够在各域信息(RSS/TDOA)相同的情况下获得更优的定位性能。
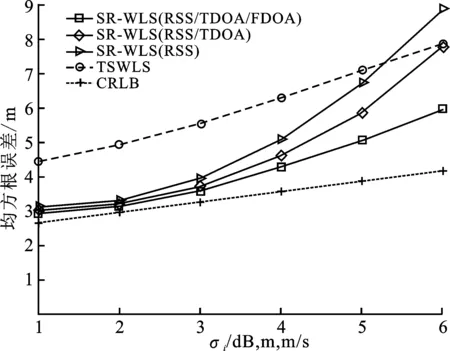
图2 均方根误差随测量误差σi的变化情况

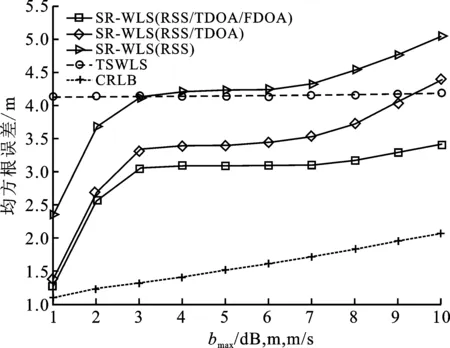
图3 均方根误差随非视距误差最大值bmax的变化情况
(3)其余各条件相同,改变非视距链接的个数Nnlos,各域测量误差与非视距误差均为定值,观察其对定位性能所产生的影响。如图4所示,所有算法对非视距传播链接具有鲁棒性。在定位信息近似相同的情况下,能时域信息融合算法与TSWLS法相比,仿真结果证实了先将所有信道认为是LOS的(各域内非视距误差为0),再对位置坐标进行迭代估计的算法在性能上的优越性及推导过程中近似操作的合理性。

图4 均方根误差随非视距链接数Nnlos的变化情况
将所提出的基于幅度平方和加权最小二乘的定位方程求解方法在能时频域信息融合的情况下与TSWLS算法进行对比,其余仿真条件与节3.1相同。改变信噪比,观测信源速度信息在不同坐标轴上估计的变化情况。由图5可见,随着噪声增加两种算法对速度估计性能均有所衰减。当测量噪声较小时,影响定位性能的因素即各个域内的非视距误差固定,两种方法的性能相同。随着噪声增大,相比于TSWLS方法出现阈值效应[11],联合能时频域的文中算法由于定位信息足够充分,并考虑非视距对性能所产生的影响,对信源速度信息的估计偏差未出现大幅度衰减的情况。由此,文中算法更适用于各个域内非视距误差与测量误差较大情况下的定位系统。

图5 偏差随信噪比的变化情况
4 结束语
为了克服非视距环境中信源定位存在的性能恶化及非视距误差估计信息缺乏问题,笔者研究了一种基于能时频多域信息融合的信源被动定位方法。采用统计平均量替换并通过幅度平方与加权最小二乘操作得到目标函数;对目标函数转化得到广义信赖域子问题,采用充分必要的最优性条件对该问题进行求解;用非视距偏差估计对信源信息进行反馈,进而迭代求精。计算机仿真验证了该算法的正确性及性能上的优越性。
在后续工作中,将进一步挖掘定位系统中的有用信息,筛选系统中任意接收站参数提高其对抗非视距传输和相对运动的能力,进而满足信号源的精确定位需求。
猜你喜欢
无线电工程(2022年4期)2022-04-21 07:19:44
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
应用数学(2020年2期)2020-06-24 06:02:40
中国计算机报(2020年9期)2020-03-25 15:10:34
北京航空航天大学学报(2017年7期)2017-11-24 05:27:26
汽车与安全(2017年9期)2017-09-29 01:36:57
电子世界(2017年16期)2017-09-03 10:57:36
居业(2017年5期)2017-07-24 13:56:27
西部广播电视(2015年4期)2016-01-15 02:05:50
电测与仪表(2015年18期)2015-04-12 00:45:28
