
基于安川MP2300的数控位置控制
2021-02-20 06:01刘华伟
内燃机与配件 2021年2期
刘华伟






摘要:现代可编程序逻辑控制器(PLC)是一种将CPU、I/O集成到一起的、简易的工业控制计算机,具有抗干扰性能好、高可靠性、高集成度、体积小等优点。本文阐述了简易数控系统位置控制的原理,并结合实际案例,介绍了安川MP2300 PLC在简易位置控制中的应用。
关键词:可编程序逻辑控制器;位置控制;伺服定位装置
中图分类号:TP241 文献标识码:A 文章编号:1674-957X(2021)02-0074-02
0 引言
气缸及液压技术,虽然可以实现一些简单的位置控制,但是其精度和控制的灵活性,远远不如伺服控制系统。
近些年来,随着工厂自动化技术的普及,以及国家“智能制造2025”的深入开展,现代化智能工厂如雨后春笋般涌出。作为智能工厂的执行环节,位置控制的精准化、快速化以及柔性化应用越来越多,位置控制的伺服化应用也随之变多。然而伺服控制比较复杂,制约了一些对位置控制要求比较简单,但是精度较高的应用的发展。
MP2300是安川公司开发的用于伺服控制的PLC。本文针对结合实际案例,介绍MP2300伺服控制的方式。
1 基于MECHATROLINK的伺服控制
传统的伺服控制,采用模拟量电压、电流或数字脉冲序列进行控制,需要专门的运动控制卡产生需要的电压、电流或脉冲序列,不仅控制复杂,还比较容易受到外界信号干扰[2]。MECHATROLINK通信协议[1]是一种基于以太网的实时通讯协议,最大传输速度为100MBits/s,最多支持62个从站。该通讯协议,最早由安川公司提出的,因此安川所有的伺服驱动装置都支持该协议。MP2300 PLC可以通过一根网线,最多同时控制62个伺服单元,接线简单,运行可靠、稳定。同时,MP2300兼具通用PLC的过程控制的特点,并支持MODBUS TCP、Profibus、EtherCAT、CCLINK等通讯协议,具有很好的扩展性。
2 伺服定位装置
2.1 定位装置机械结构
伺服定位装置采用十字滑台结构,由2台安川SIGMA 7伺服电机以及导轨、丝杠构成。伺服电机和丝杠用联轴器连接,以提高直线运动的响应速度和精度。根据现场要求,该十字滑台可以实现精确的定位功能,以及简单的直线插补和圆弧插补功能。为了防止各轴过行程,在各轴的最大行程和最小行程处安装了限位开关。(图1)
2.2 定位装置的伺服电气
采用安川SIGMA7伺服电机做为驱动单元,采用带MECHATROLINK接口的伺服放大器。由于MP2300可以作为MECHATROLINK主站,且可以进行类似BASIC语言的高级语言编程,编程灵活,稳定性好,与伺服放大器采用网线连接,根据SIGMA系列伺服放大器电气手册,采用MECHATROLINK协议的伺服放大器,终端放置终端电阻。PLC与伺服放大器的接线如图2所示。
为了能实时显示当前坐标,以及满足设定一些简单的动作的要求,配备了一个触摸屏。触摸屏与PLC采用MODBUS TCP协议通讯。触摸屏可以实时显示当前位置坐标、目标位置坐标以及剩余量。当某根轴移动时,其后面的指示灯由红色变为绿色。(图3)
2.3 伺服定位装置功能实现
2.3.1 电子齿轮设定
电子齿轮即每一个单位的输入,对应多少单位的输出。因为本文中的机械结构是伺服电机与丝杠能过联轴器直接连接,因此伺服电机端电子齿轮比为1:1。为了后续编程方便,我们希望通过1个单位的输入指令,定位装置移动0.001mm。本装置采用的是丝杠螺距为10mm,机械装置旋转一次的脉冲数为:10/0.001=10000(指令单位),因此电子齿轮设定为:10000:1:1。
2.3.2 加减速设定
为了保证伺服电机运行平稳,避免伺服电机启动和停止时的冲击和振荡,在伺服电机启动和停止阶段,使用SCC命令,设定加减速时间曲线。(图4)
2.3.3 插补速度计算[3]
在2轴插补控制中,最后的插补速度是各轴的合成速度。在程序中,我们指定的是最后的合成速度,拆分成各轴的运动速度的公式为:
如图5所示。
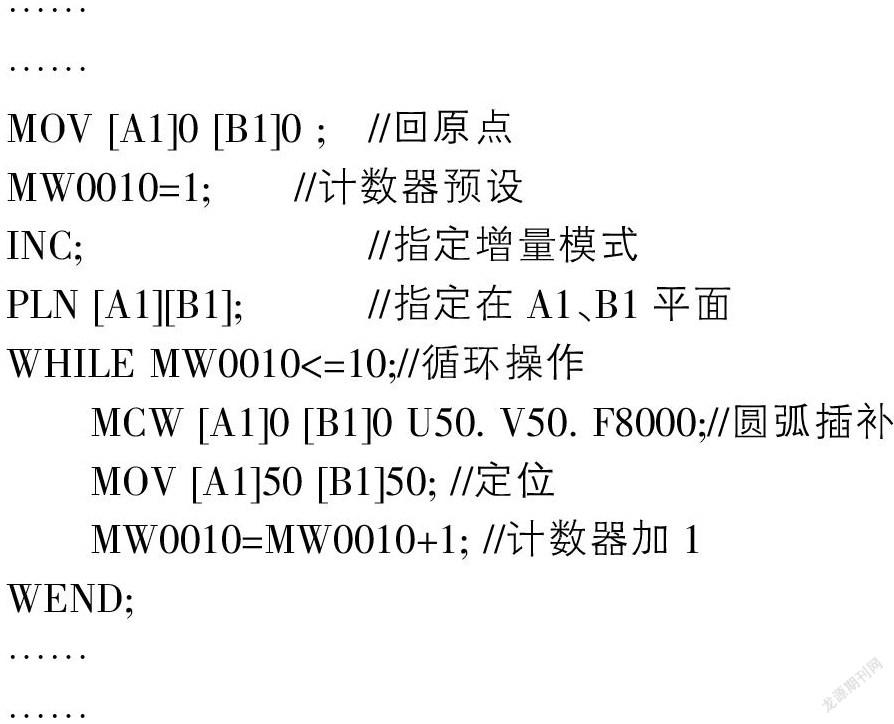
设定为以上参数,根据人机界面设定的位置要求,进行伺服控制,如下:
……
……
MOV [A1]0 [B1]0 ; //回原点
MW0010=1; //计数器预设
INC; //指定增量模式
PLN [A1][B1]; //指定在A1、B1平面
WHILE MW0010<=10;//循環操作
MCW [A1]0 [B1]0 U50. V50. F8000;//圆弧插补
MOV [A1]50 [B1]50; //定位
MW0010=MW0010+1; //计数器加1
WEND;
……
……
3 结论
MP2300 PLC与SIGMA 7伺服放大器可以通过MECHATROLINK协议进行通讯,具有连接简单、抗干扰性强的特点。MP2300可以使用类似BASIC语言进行编程,提高编程效率。在增加了上位机后,可以实现更复杂的运行控制,而实现成本要比使用数控系统低廉很多。
参考文献:
[1]Radia Perlman, Interconnections: Bridges, Routers, Switches, and Internetworking Protocols (2nd Edition). Addison-Wesley 1999. ISBN 0-201-63448-1. In particular Ch. 18 on "network design folklore". [C].
[2]王太勇,李波,李宏伟,等.基于 CAN总线嵌入式结构的运动控制器的研究[J].机床与液压,2005(9).
[3]丁亮,尤波,于振中,等.基于 USB.DSP的开放式运动控制器开发[J].电机与控制学报,2006,10(3).
